刊名:工矿自动化
1973年创刊, 月刊
主管:中国煤炭科工集团有限公司
主办:中煤科工集团常州研究院有限公司
编辑出版:《工矿自动化》编辑部

工矿自动化
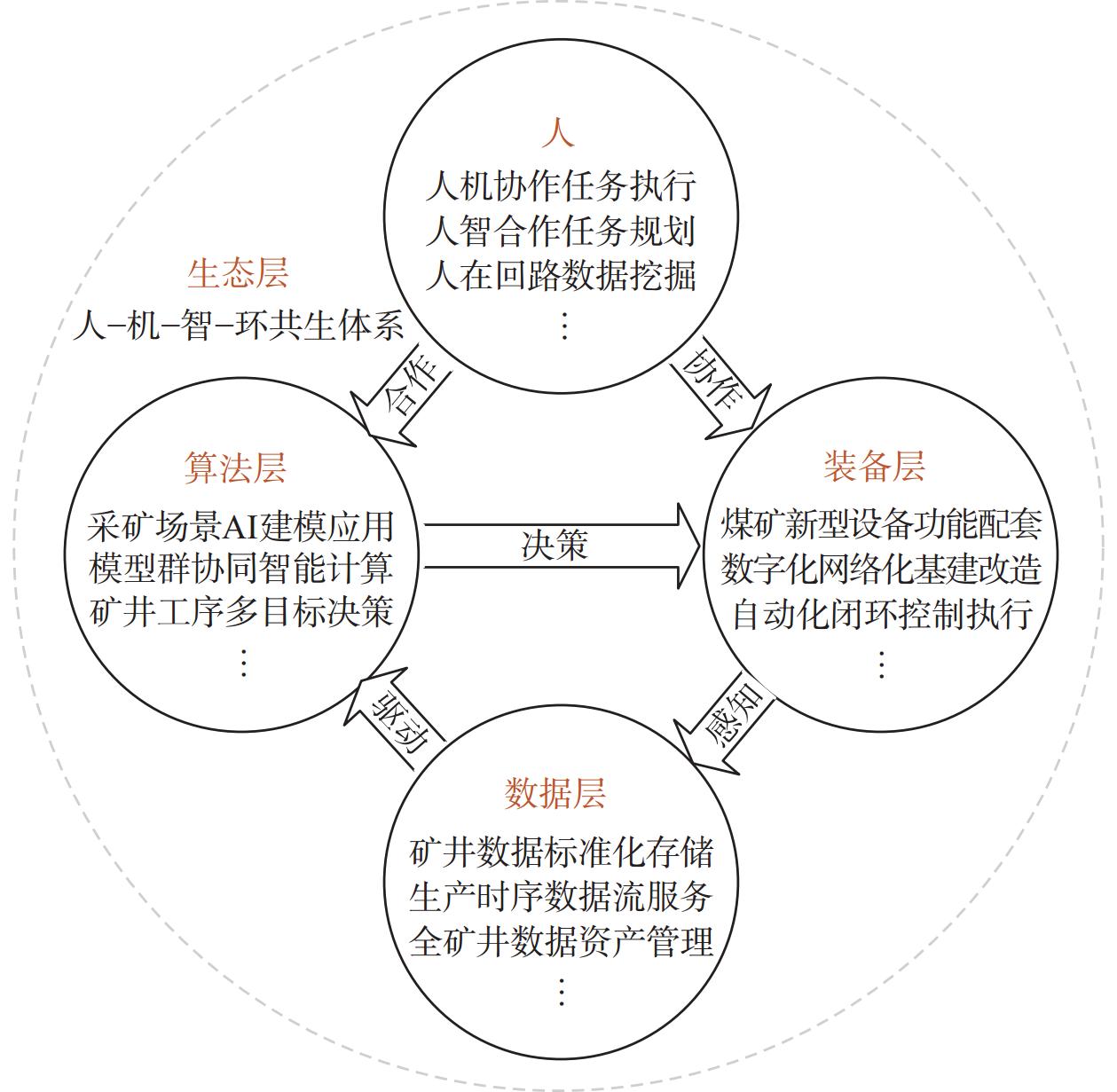
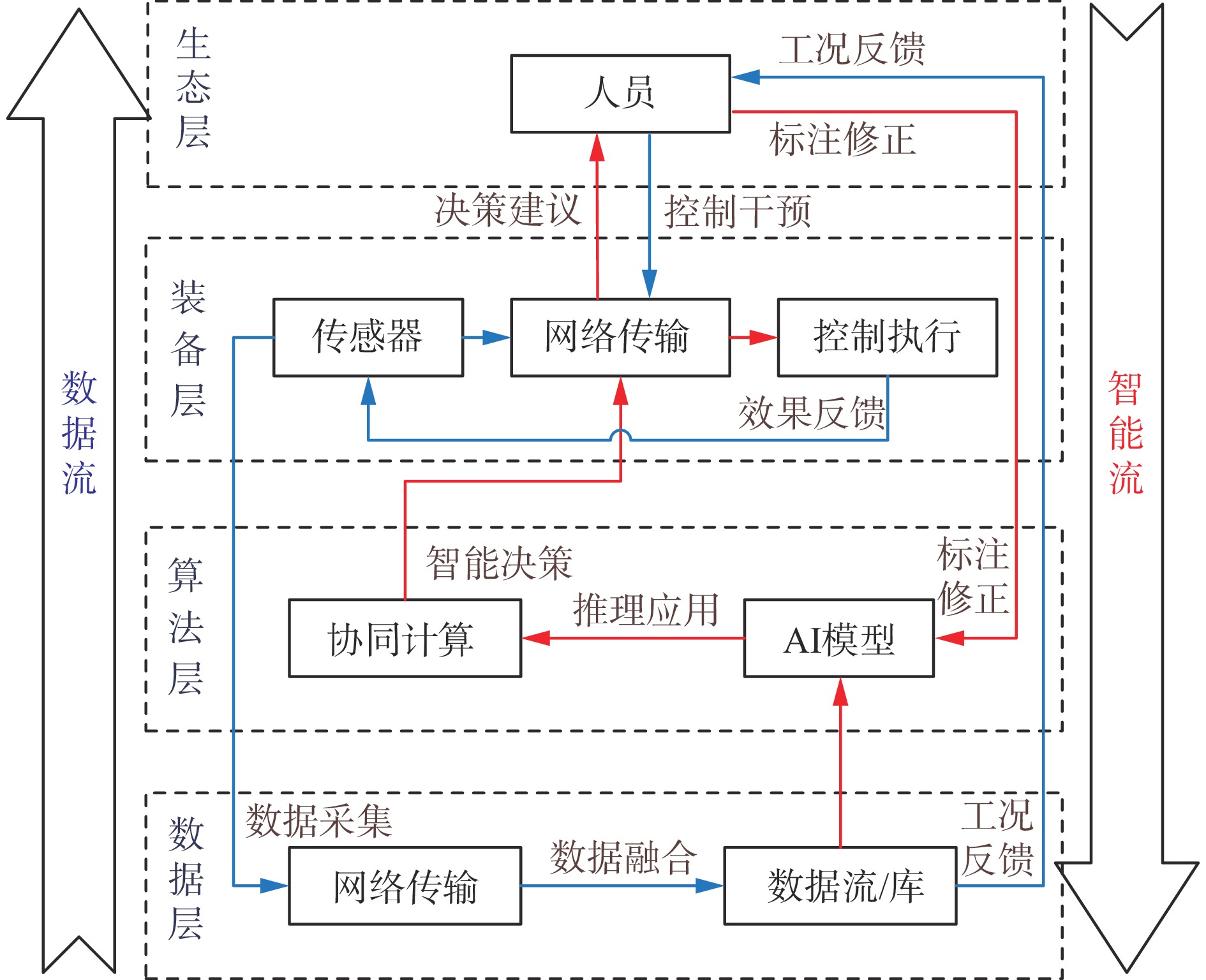
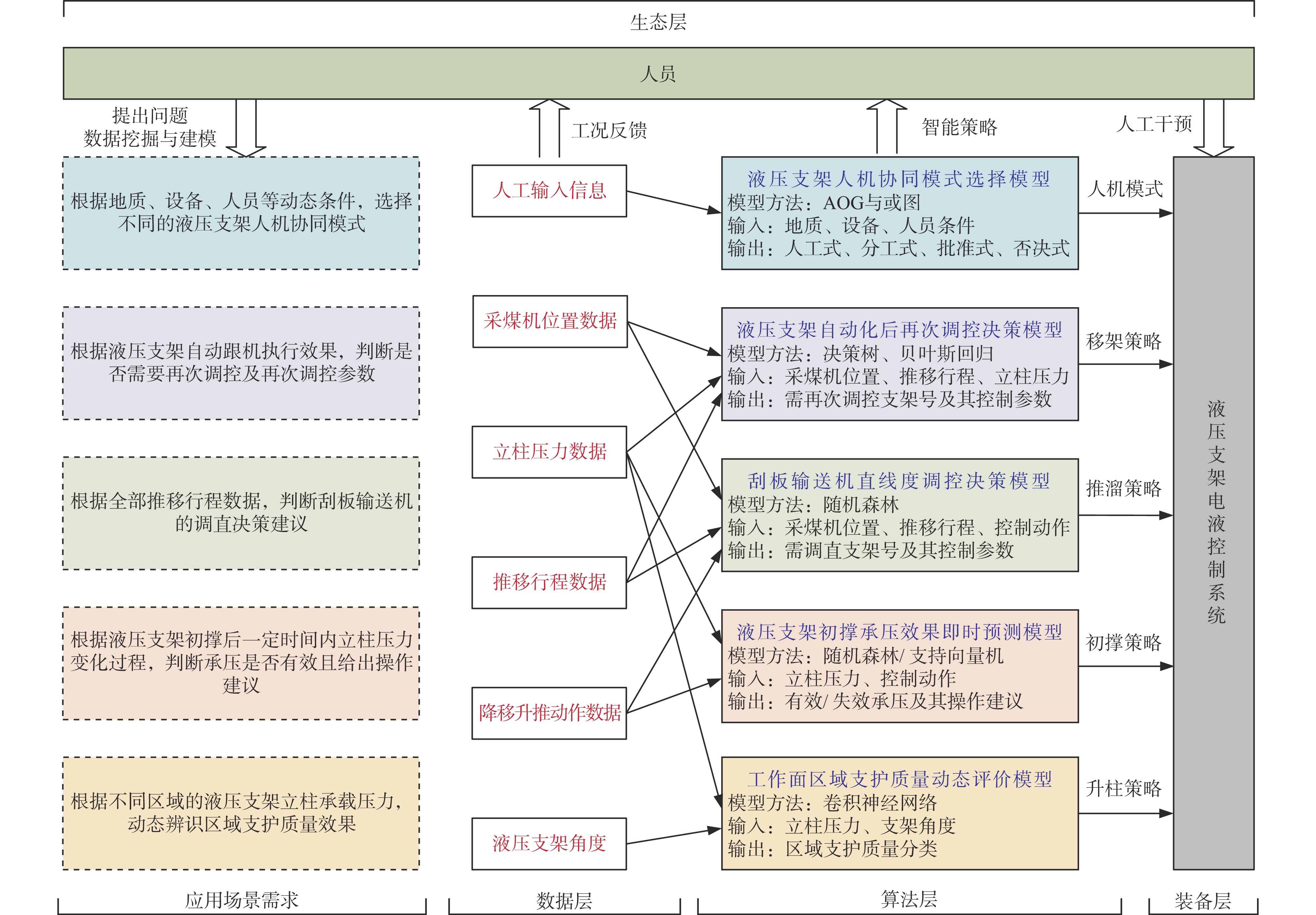
数据与智能是驱动精准化、高效化和安全化智能采矿可持续发展的核心引擎。提出了基于“数据−算法−装备−生态”四维协同架构的智能采矿数智赋能技术体系,构建了涵盖数据治理、智能决策、装备执行与人机协同的采矿全链条智能化闭环框架。数据层通过标准化存储架构与多模态数据融合,建立全矿井...
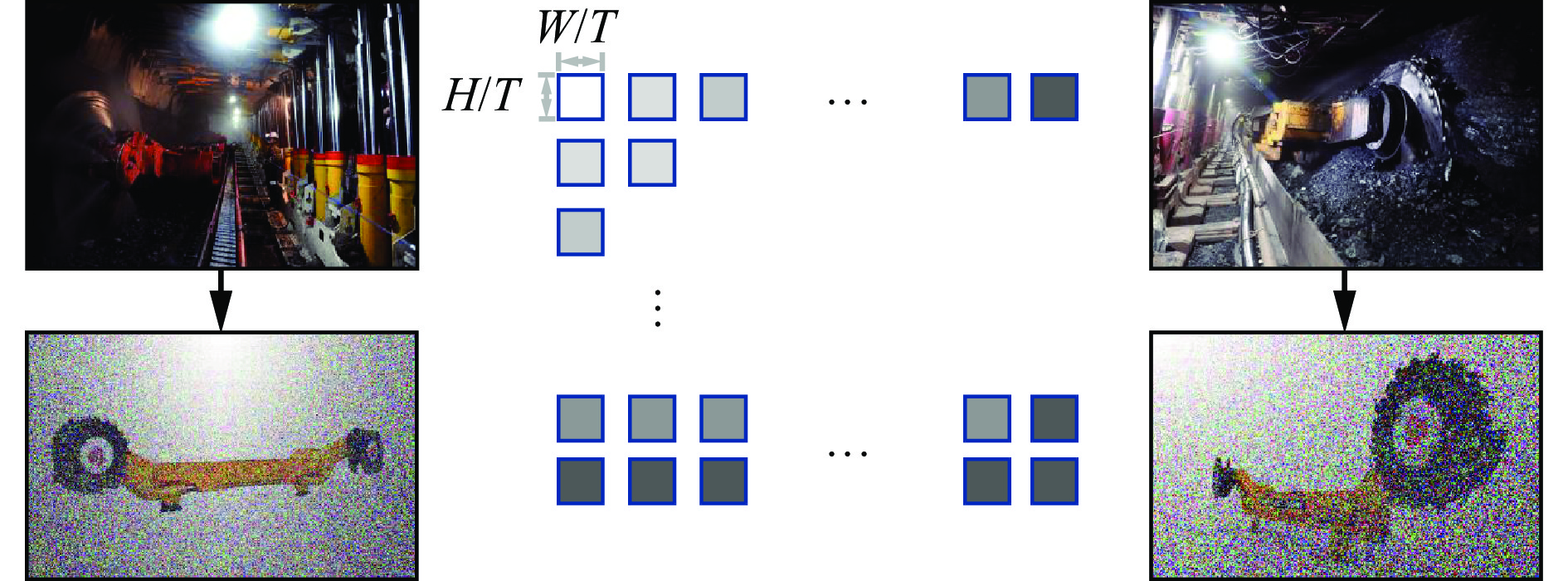
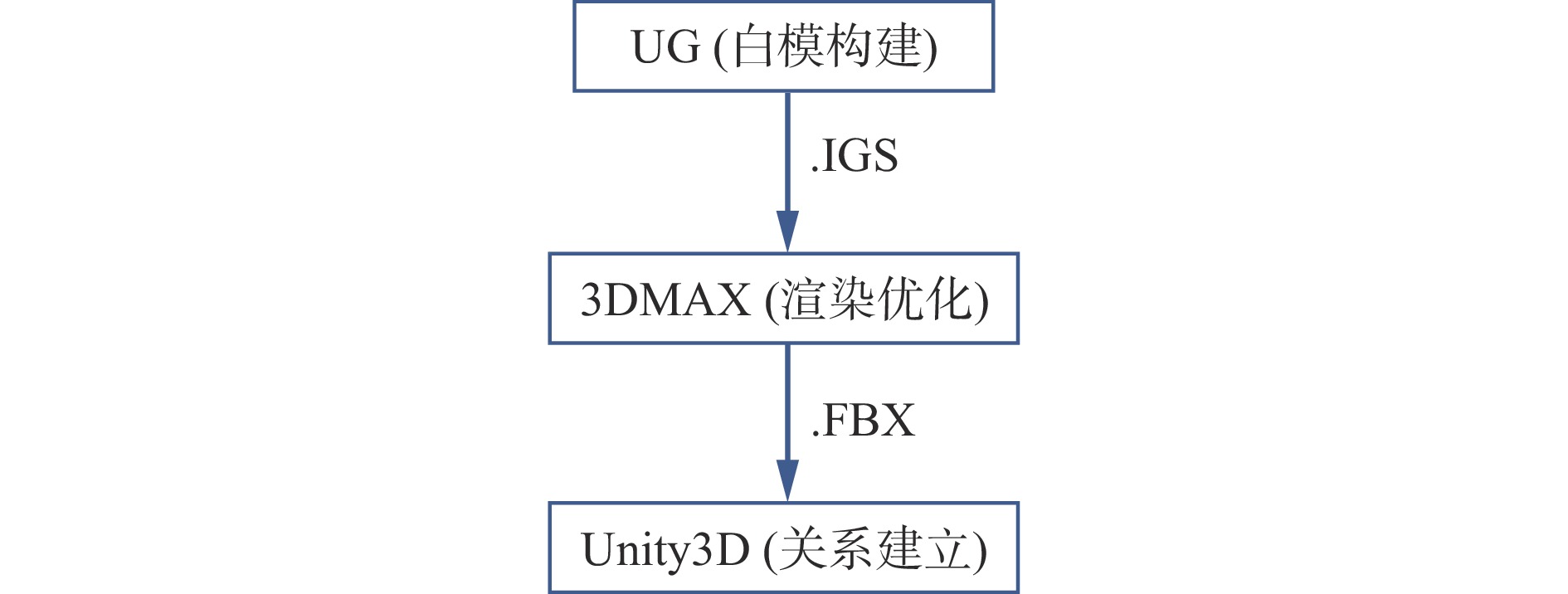
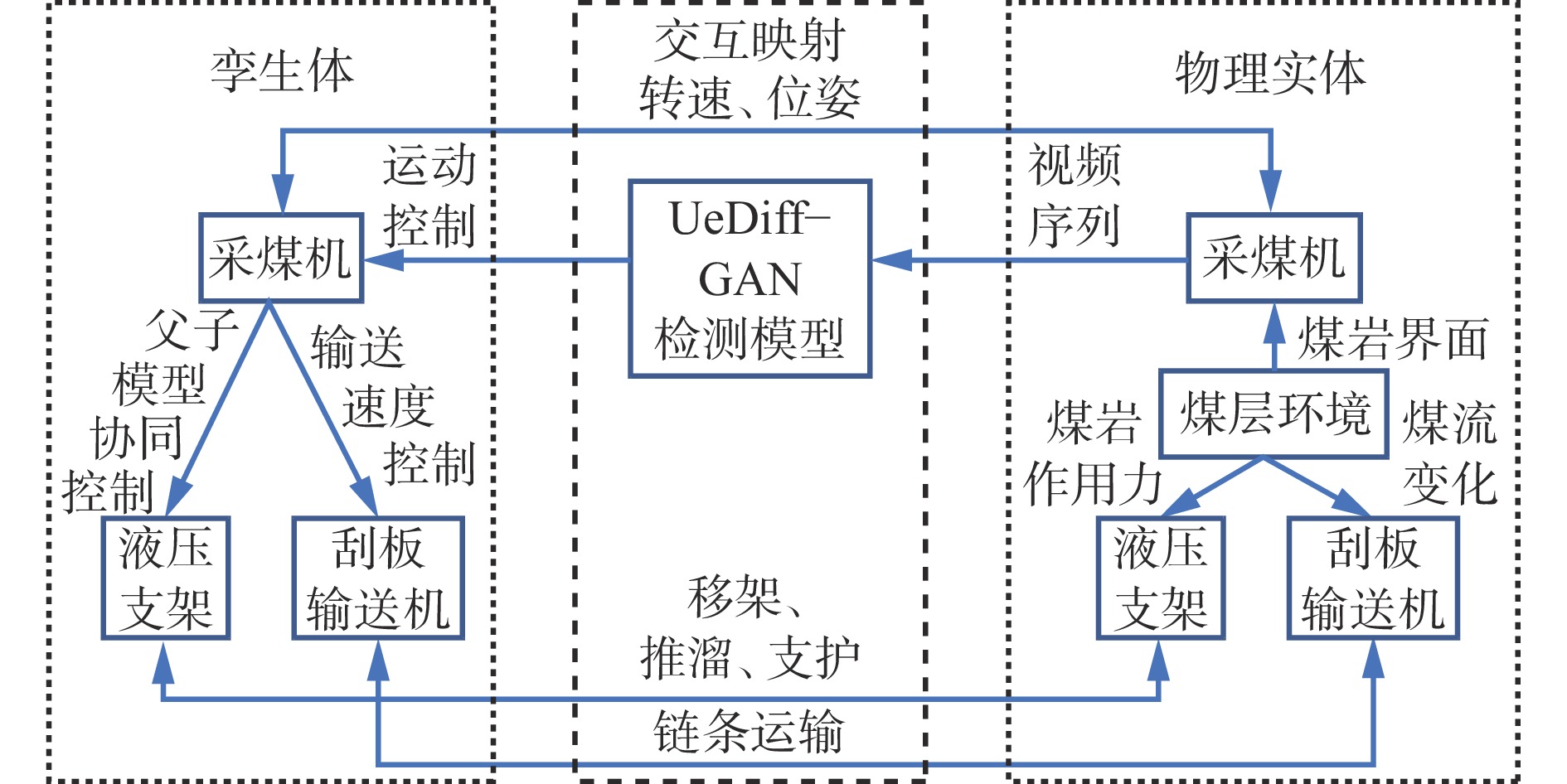
矿井综采工作面数字孪生模型的构建过程需要手动构建实体的数字孪生3D模型,然后对实体进行目标检测,并根据实时检测结果控制3D模型,以确保孪生体与实体之间的同步映射关系。因此,对井下目标的实时、准确检测是实现虚实同步映射控制的关键。目前主流的目标检测方法需要在传统模型中引入或...
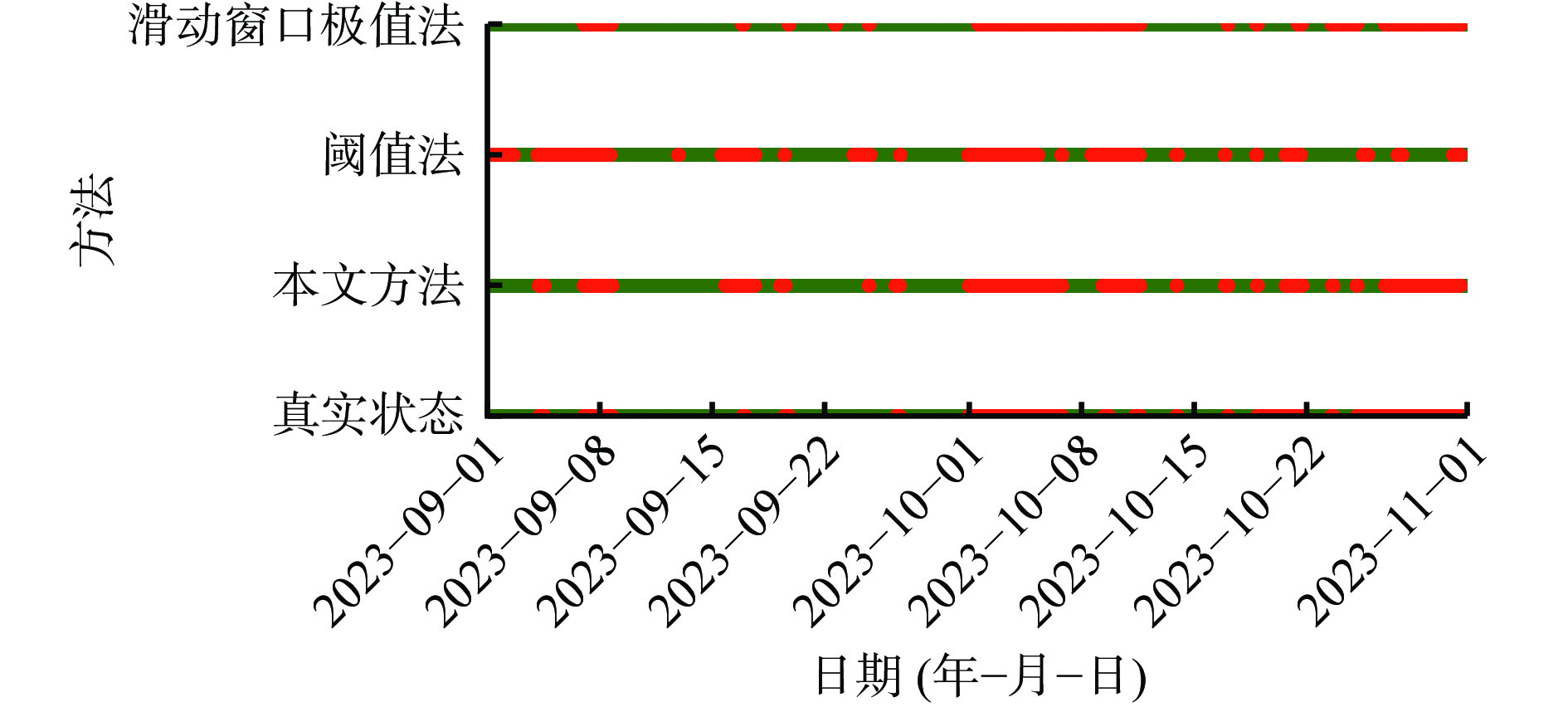
基于液压支架工作阻力数据进行工作面来压判识需解决2个问题:一是如何从海量的工作阻力数据中提取循环末阻力数据,二是如何有效利用提取出的循环末阻力数据对工作面是否来压实现有效判断。现有的循环末阻力提取方法大多依赖固定规则和经验值参数,在复杂工作面环境下准确性低且适应性差。针对...
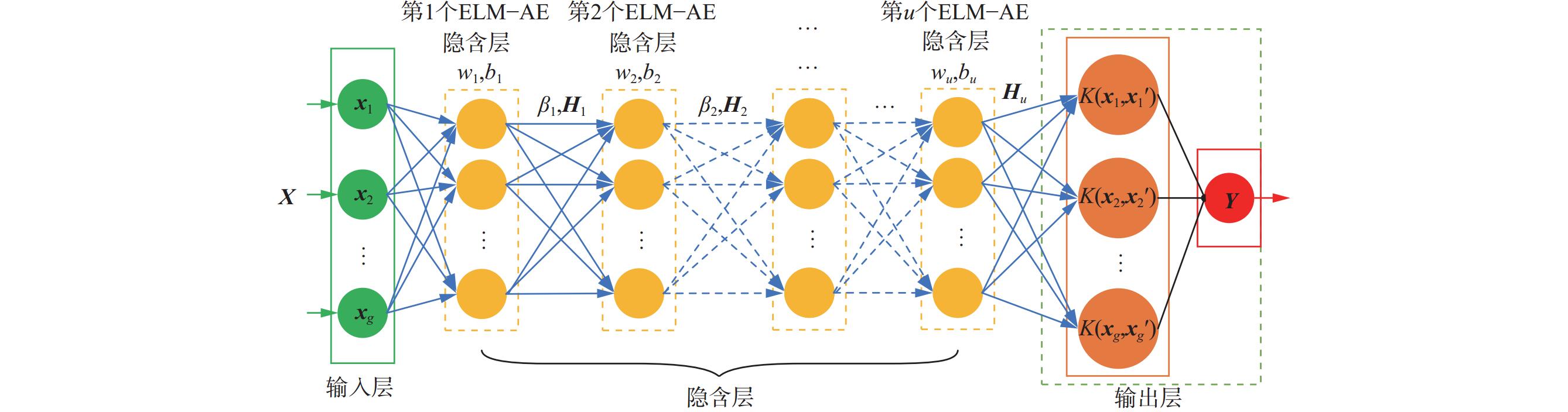
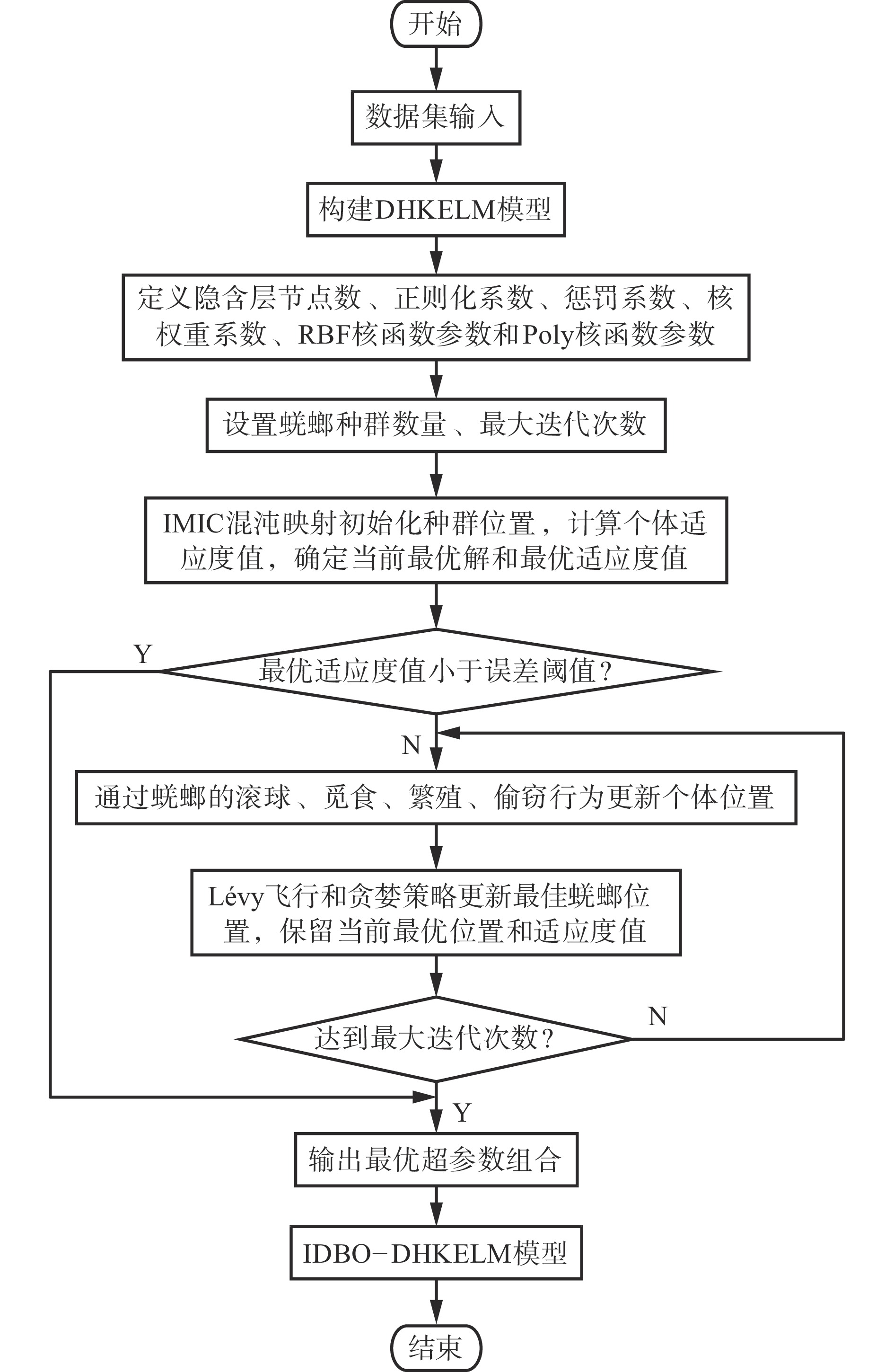
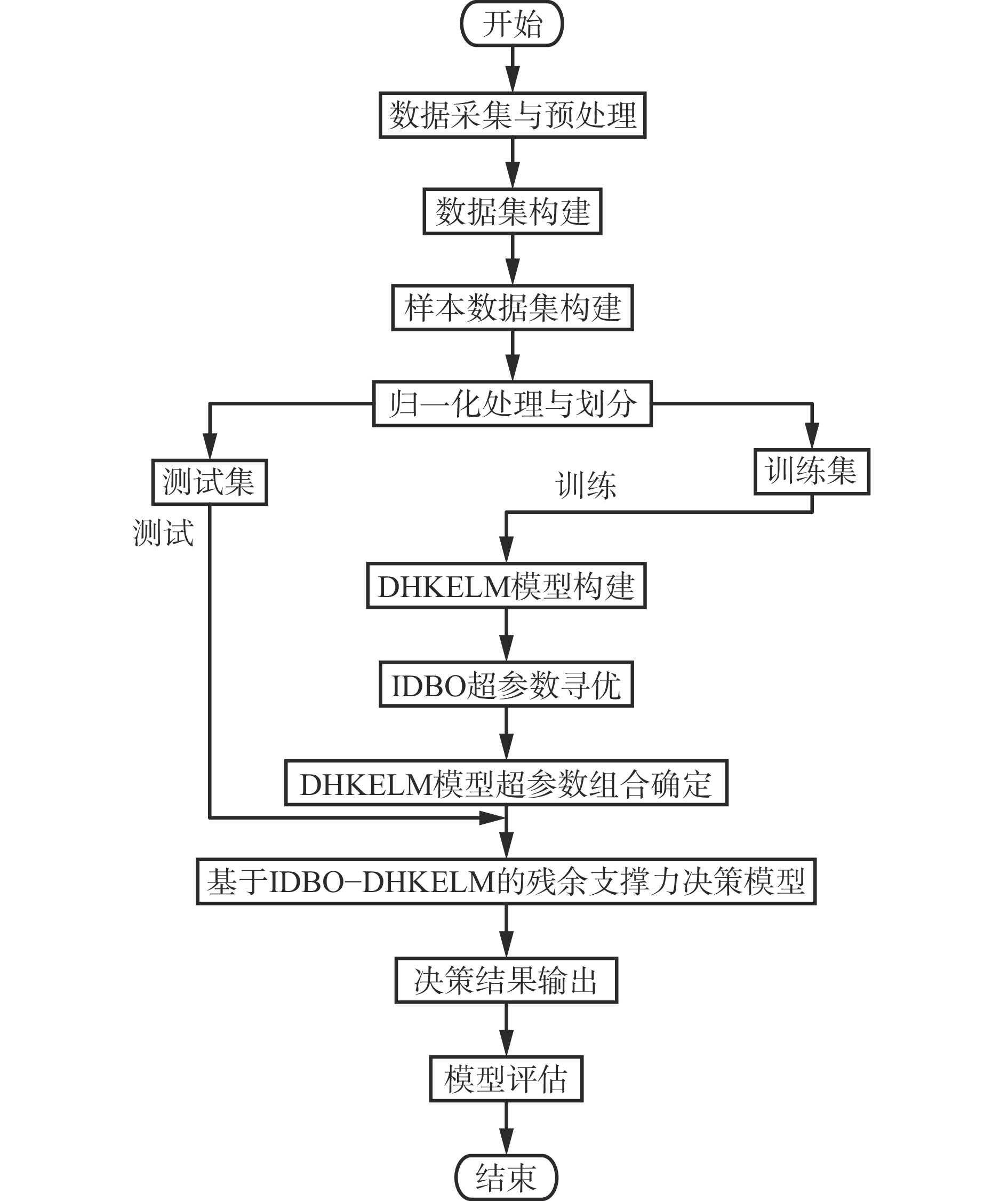
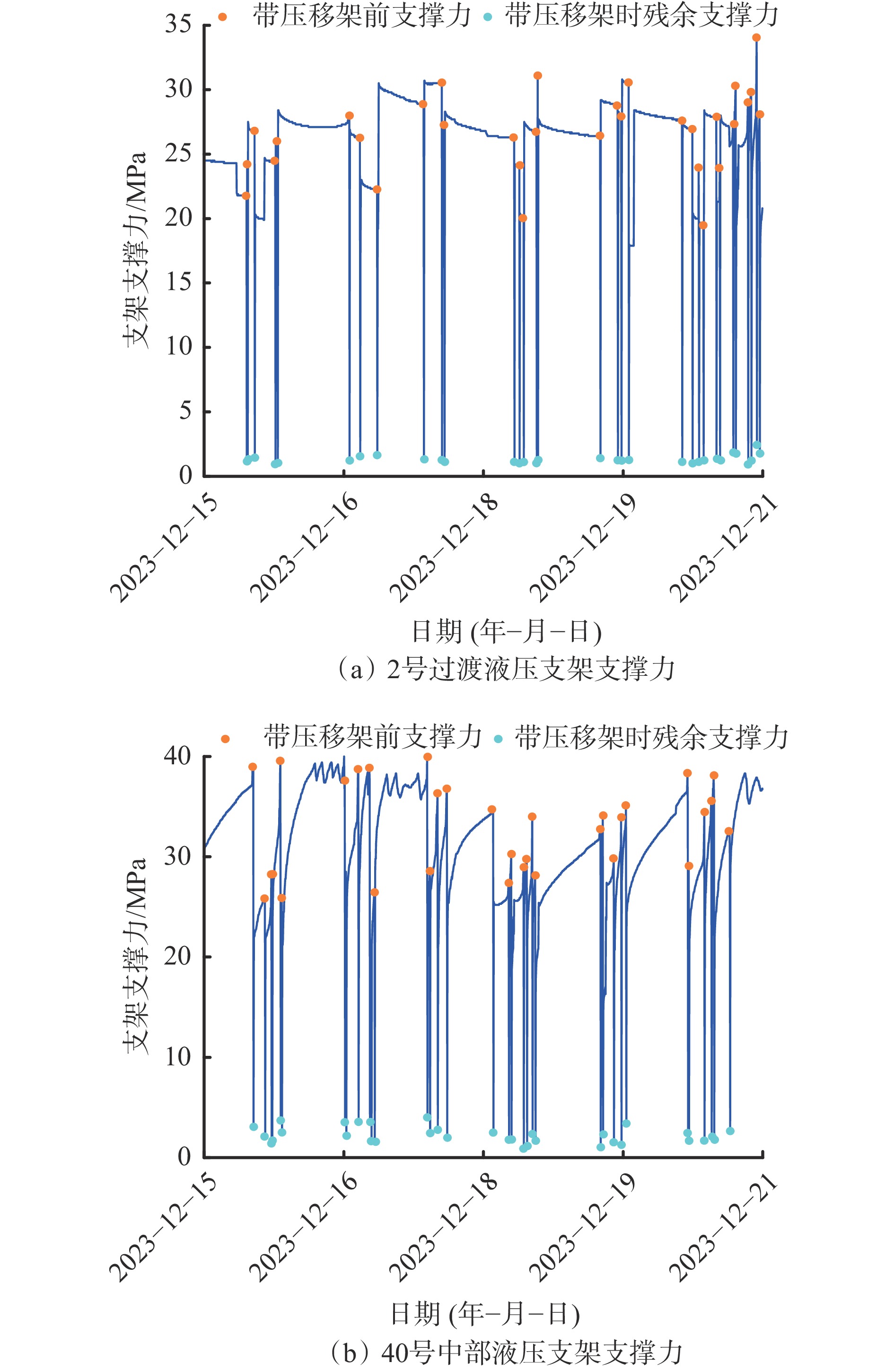
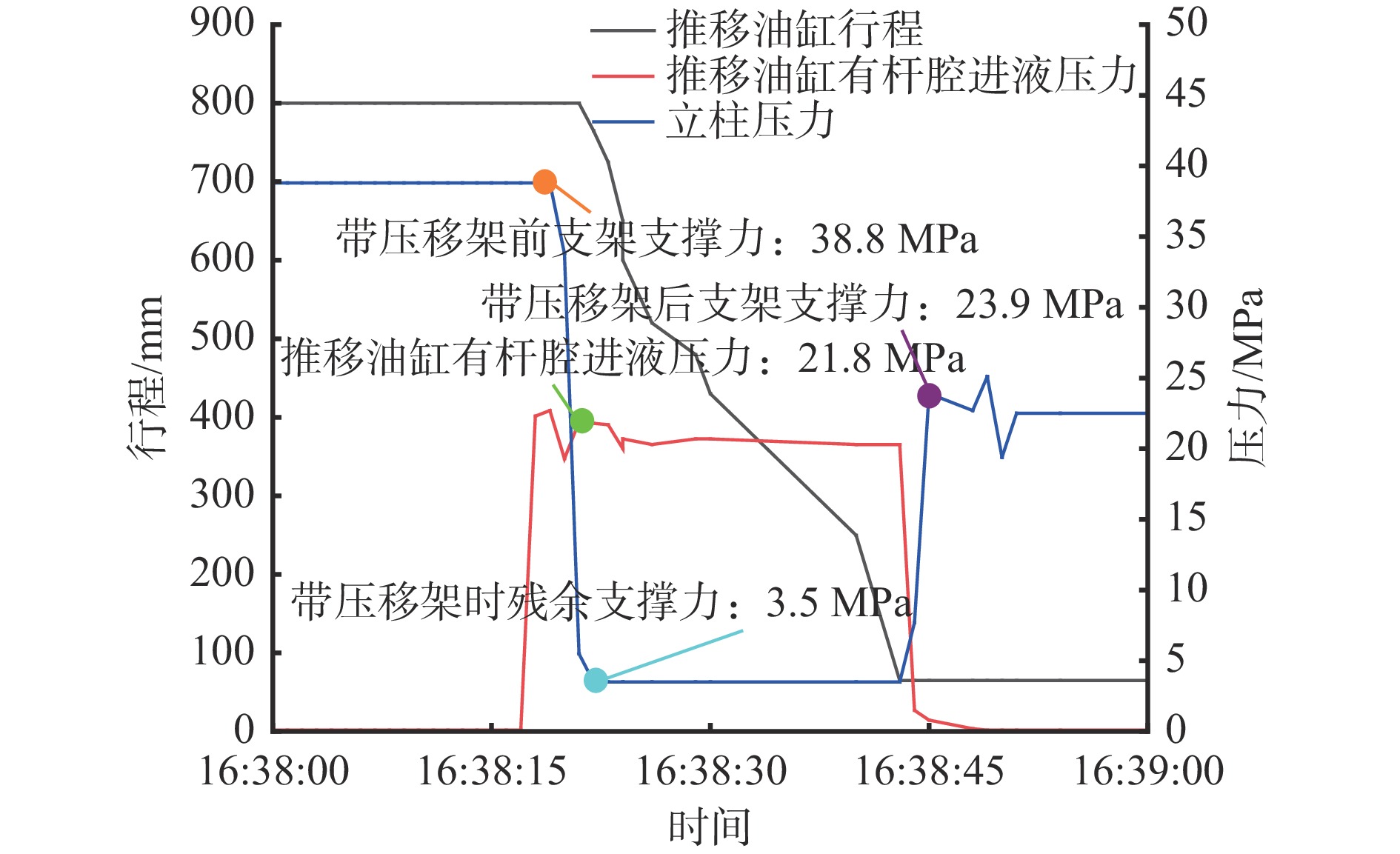
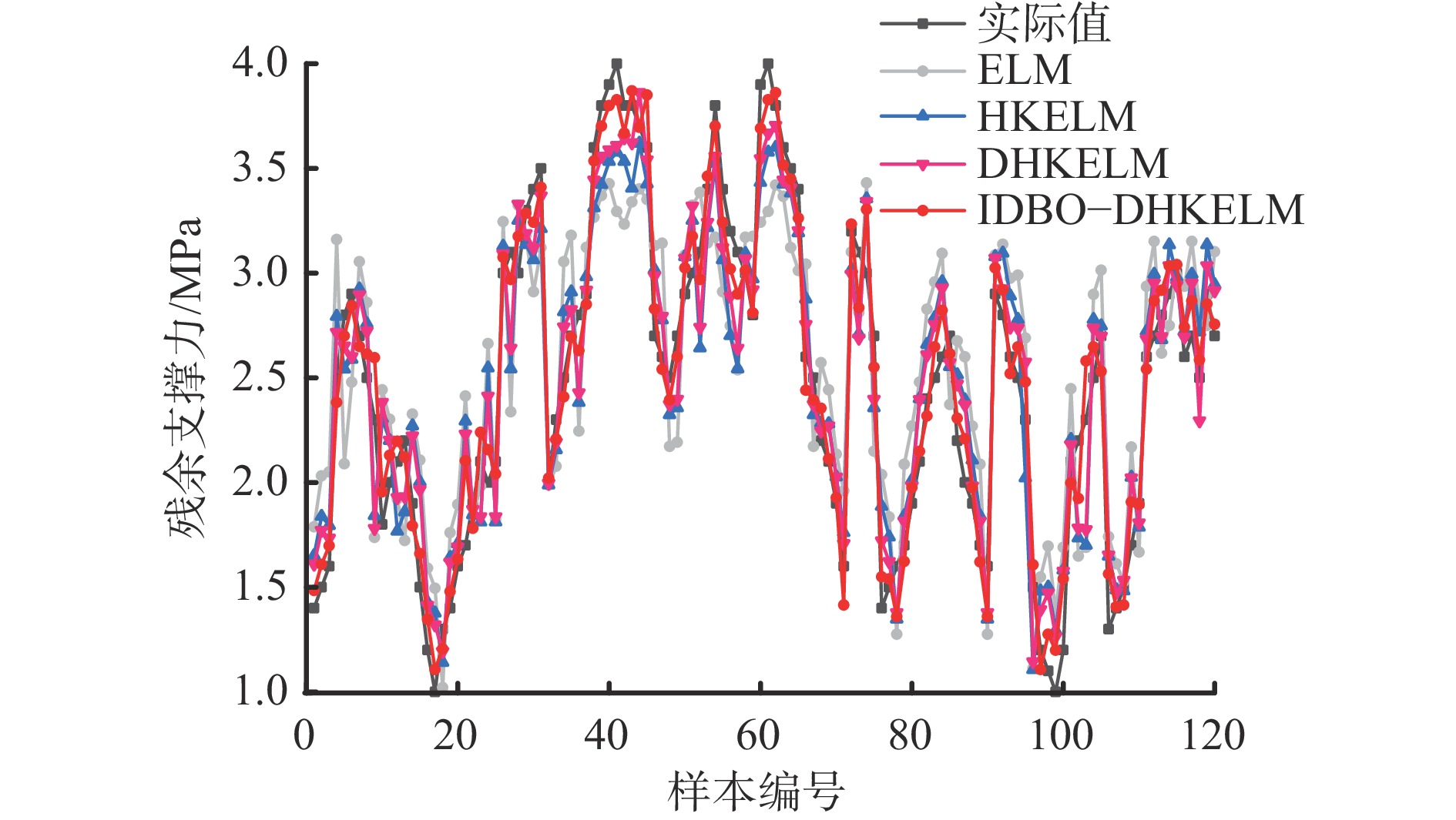
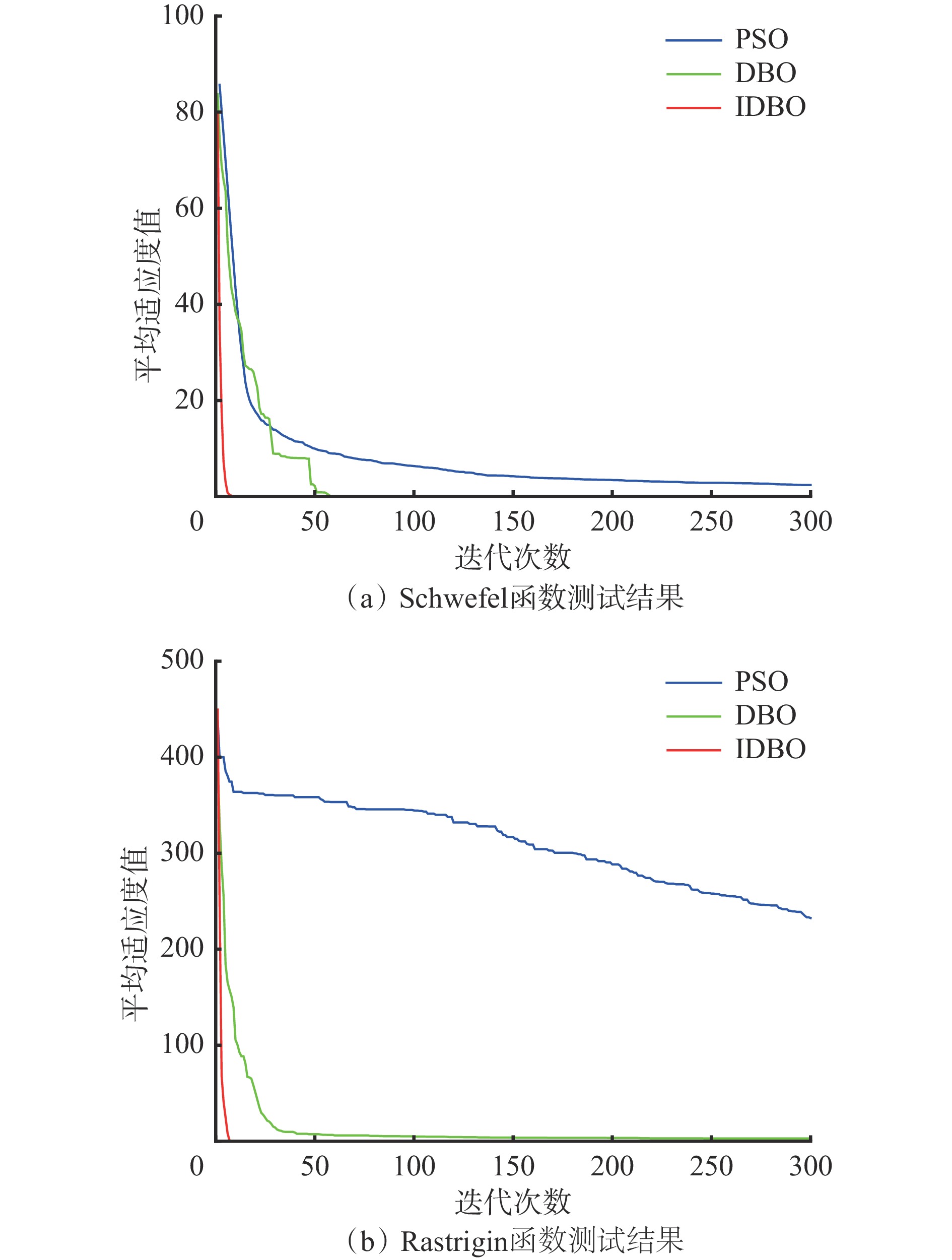
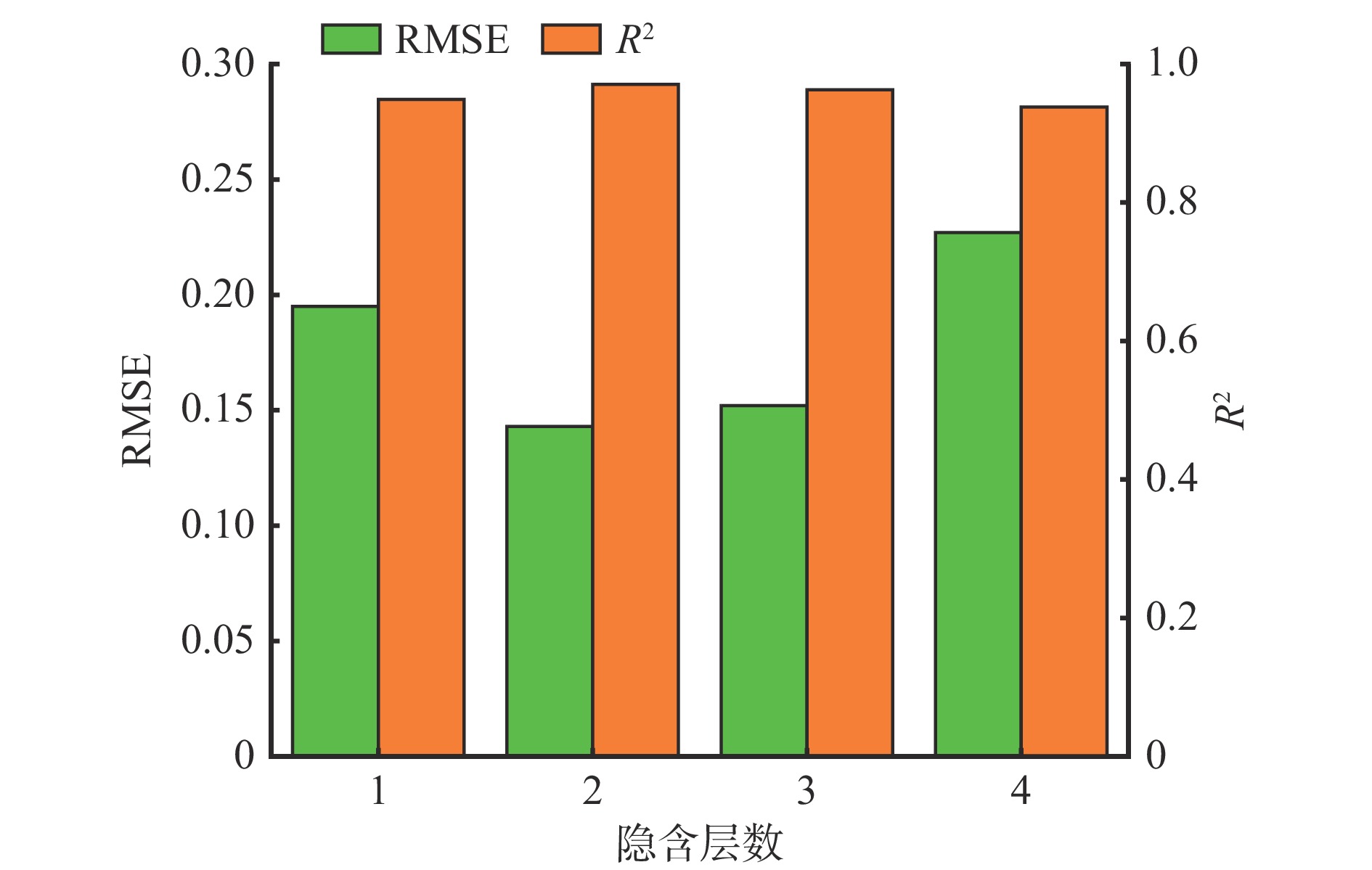
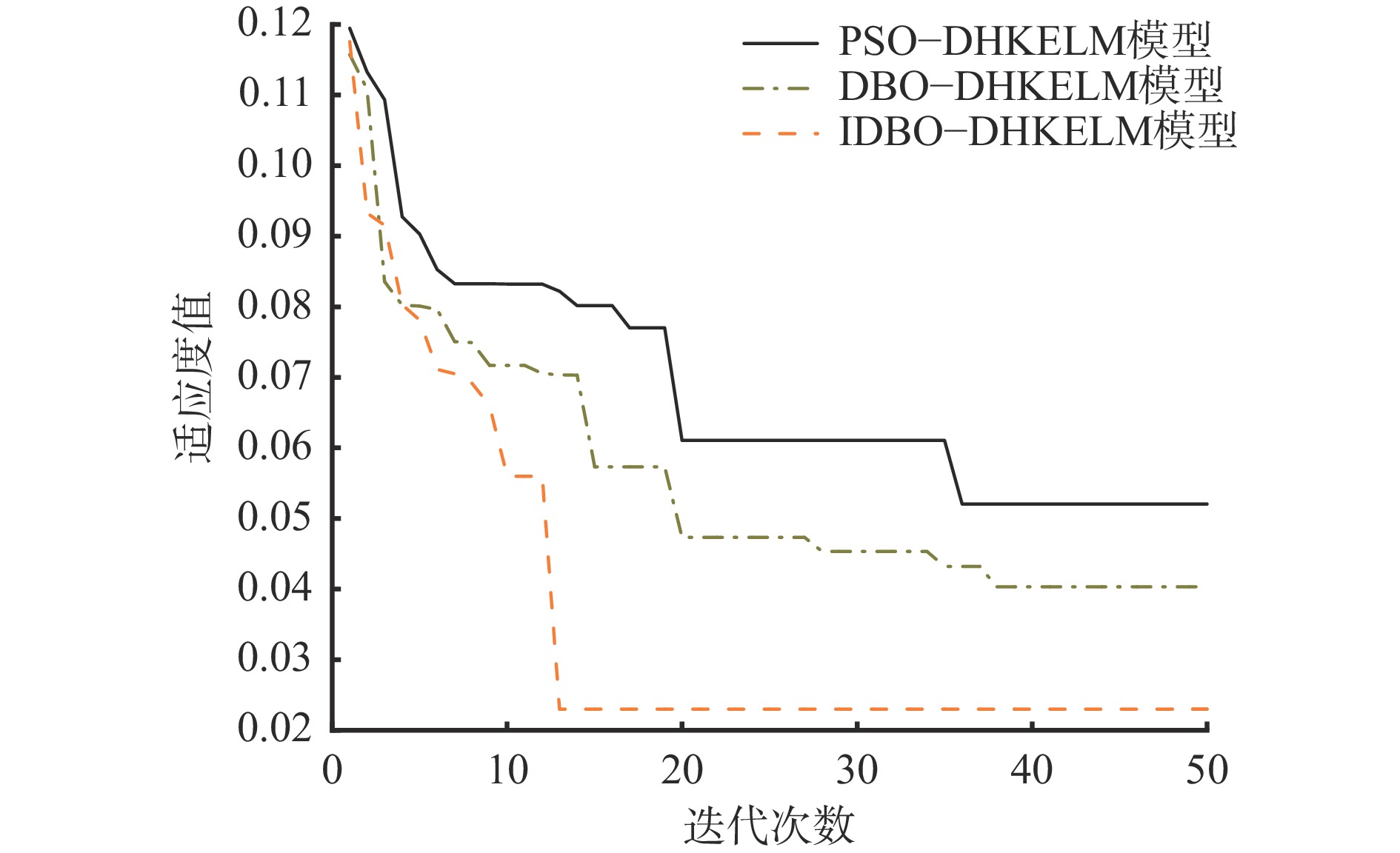
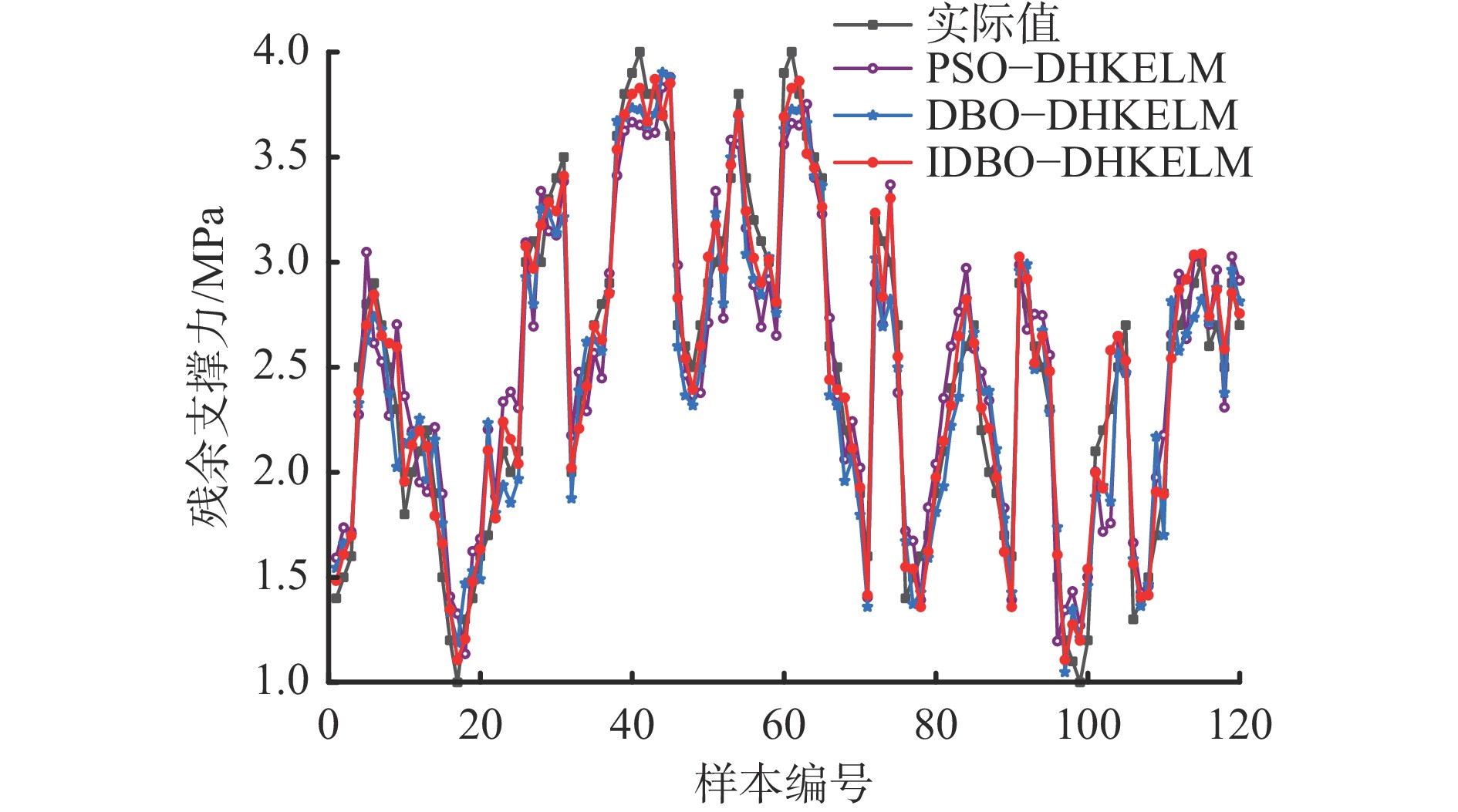
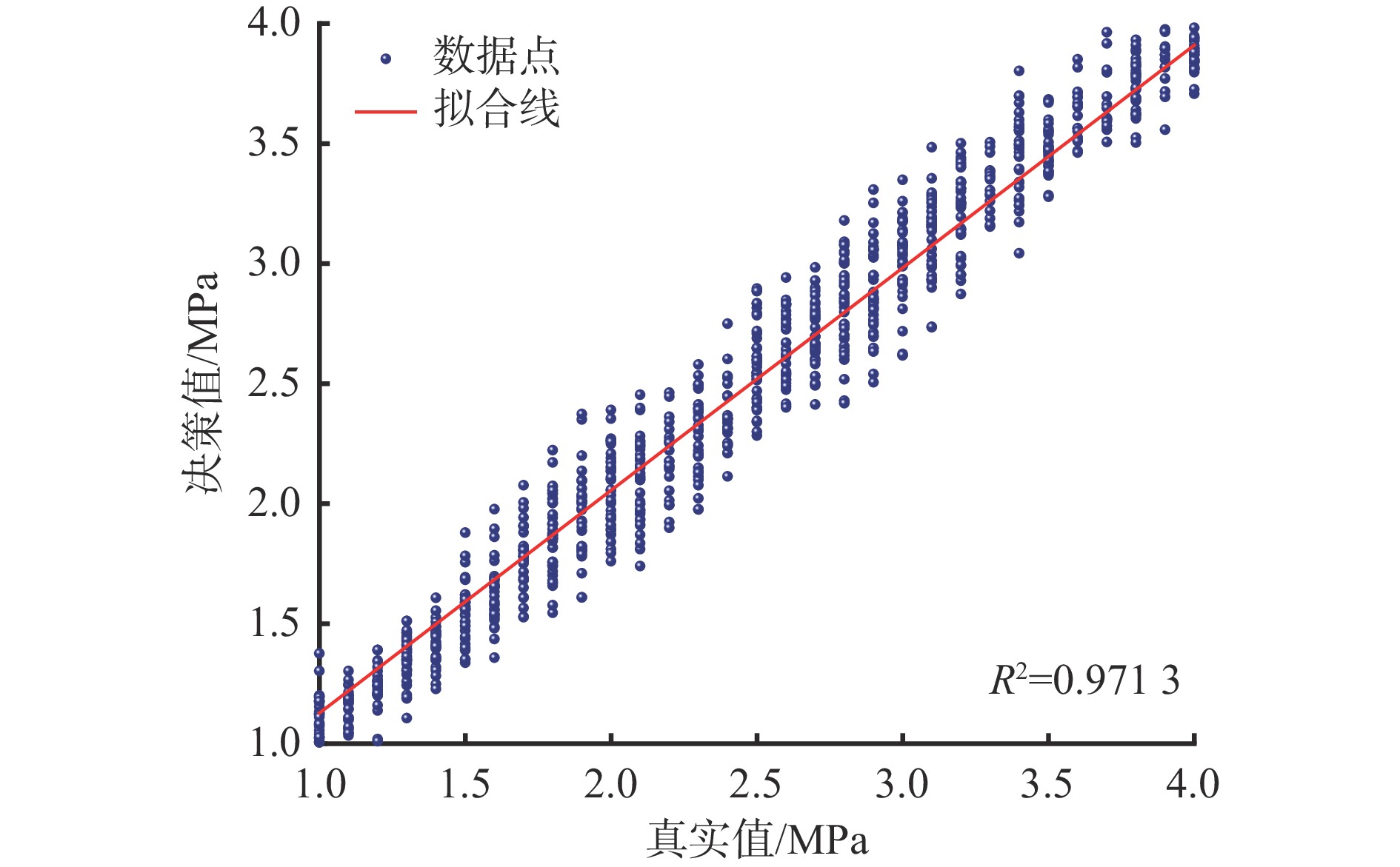
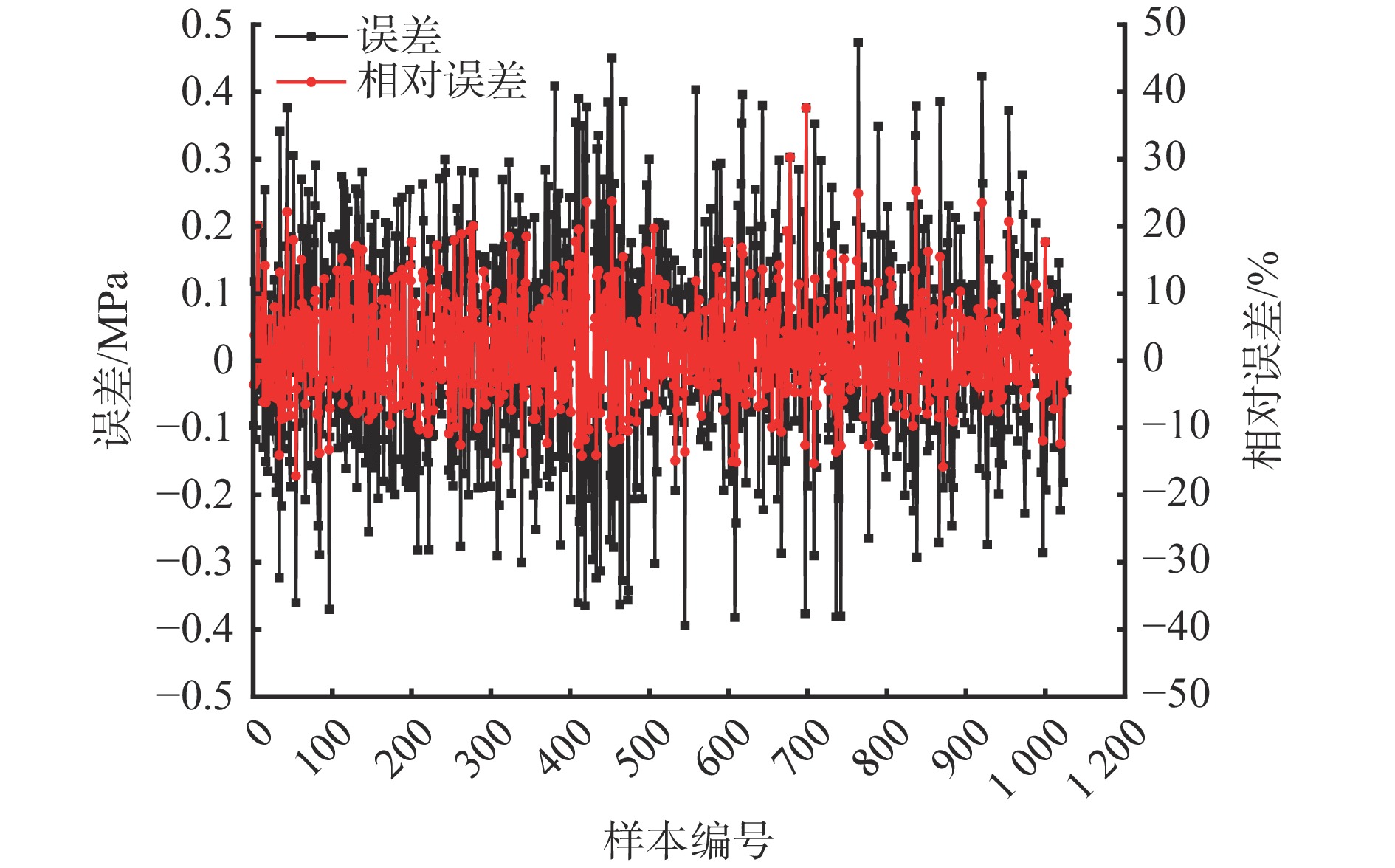
在破碎顶板条件下,液压支架带压移架过程中残余支撑力的精准决策对于提高极薄煤层智能化开采效率和保障作业安全至关重要。为实现极薄煤层破碎顶板条件下液压支架带压移架残余支撑力的准确决策,提出了一种基于改进蜣螂算法(IDBO)优化深度混合核极限学习机(DHKELM)的液压支架带压...
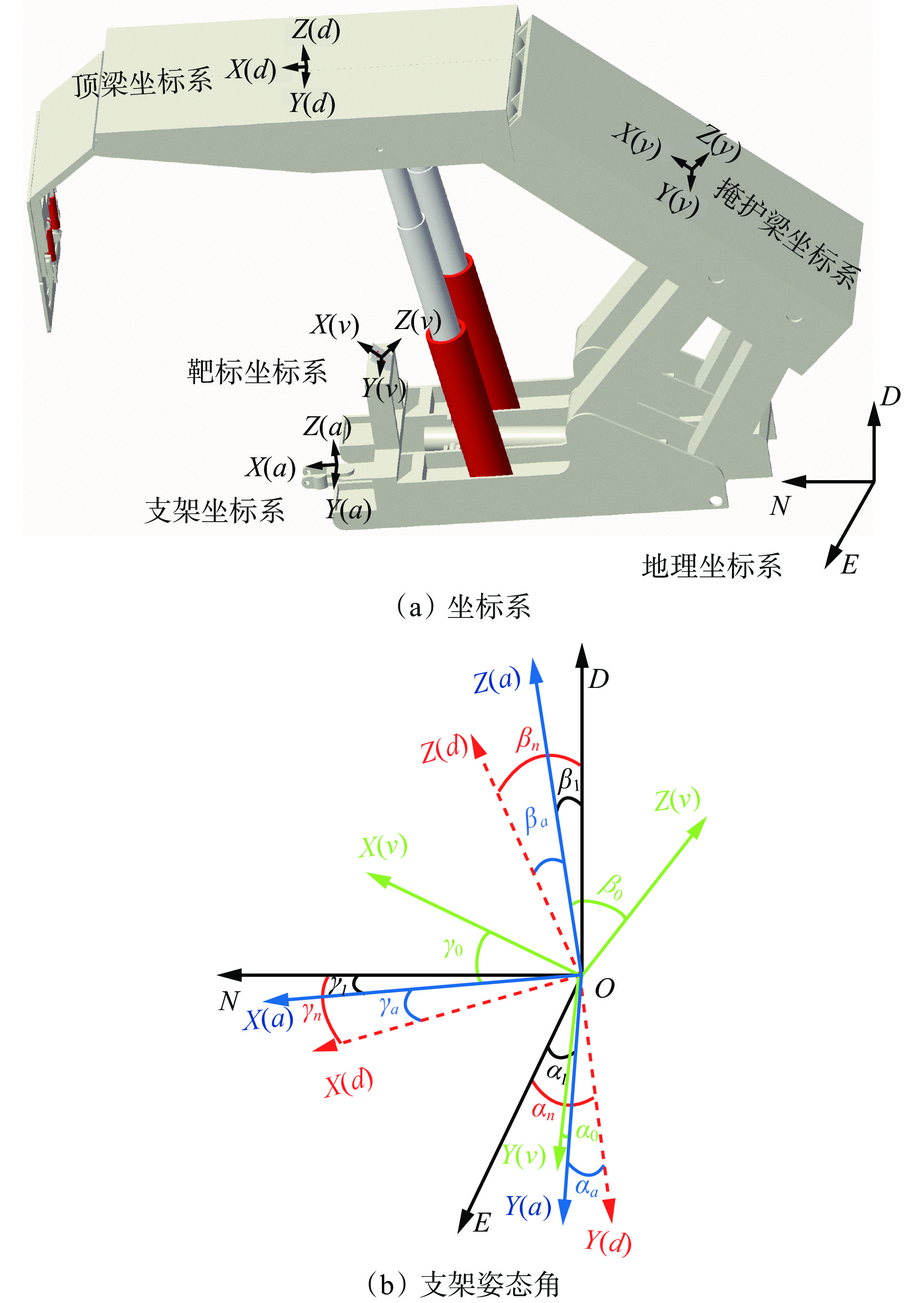
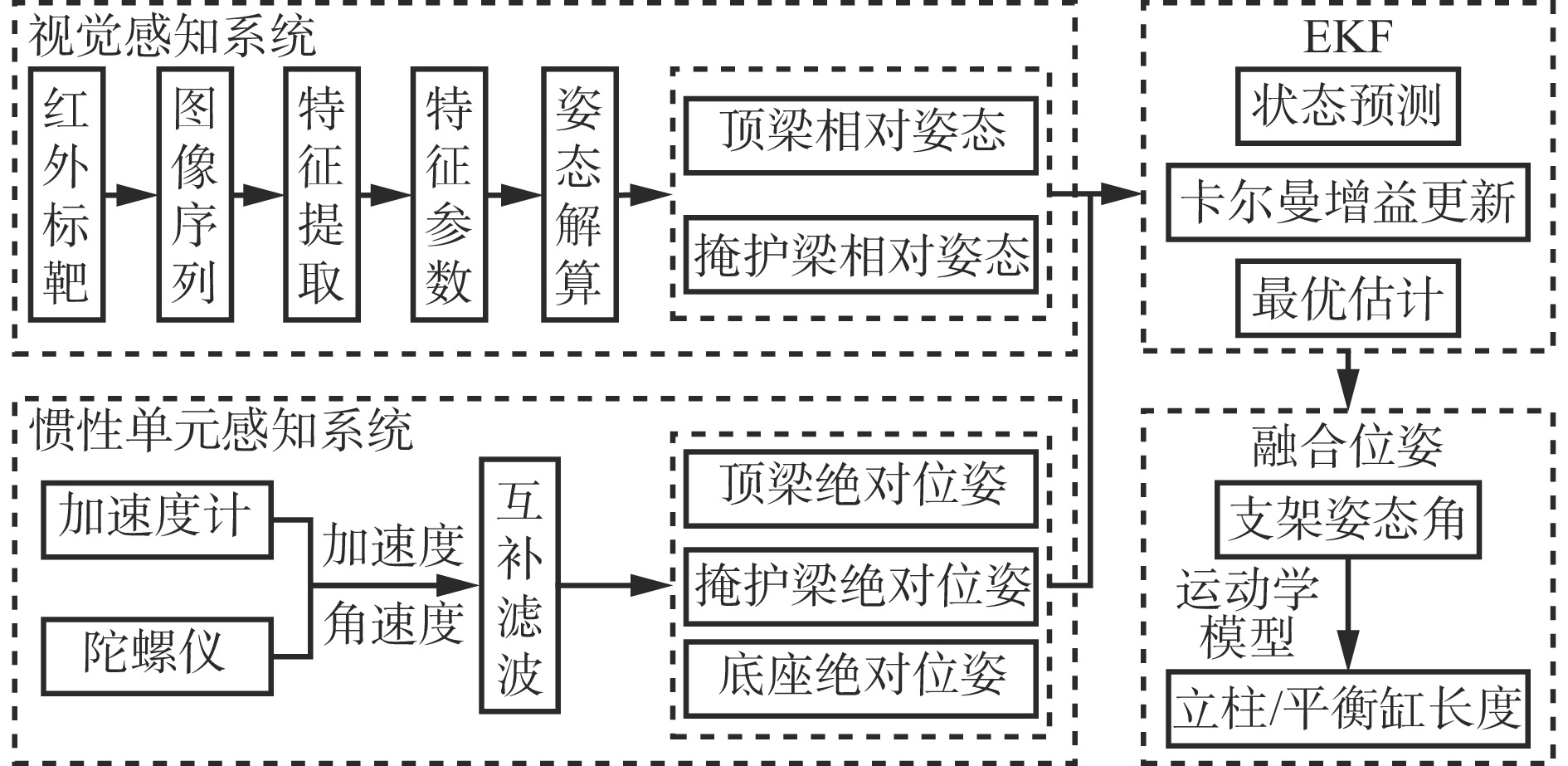
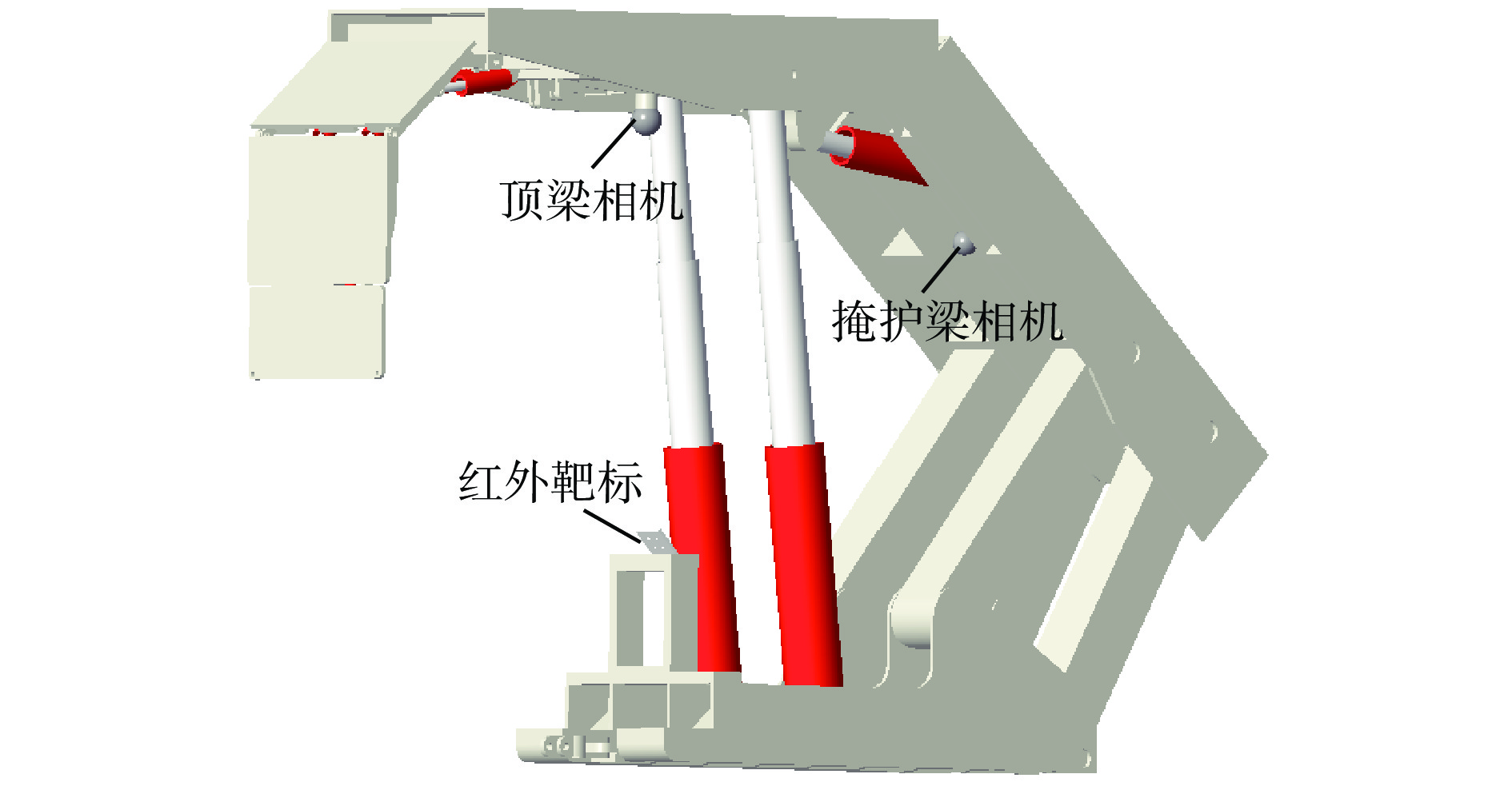
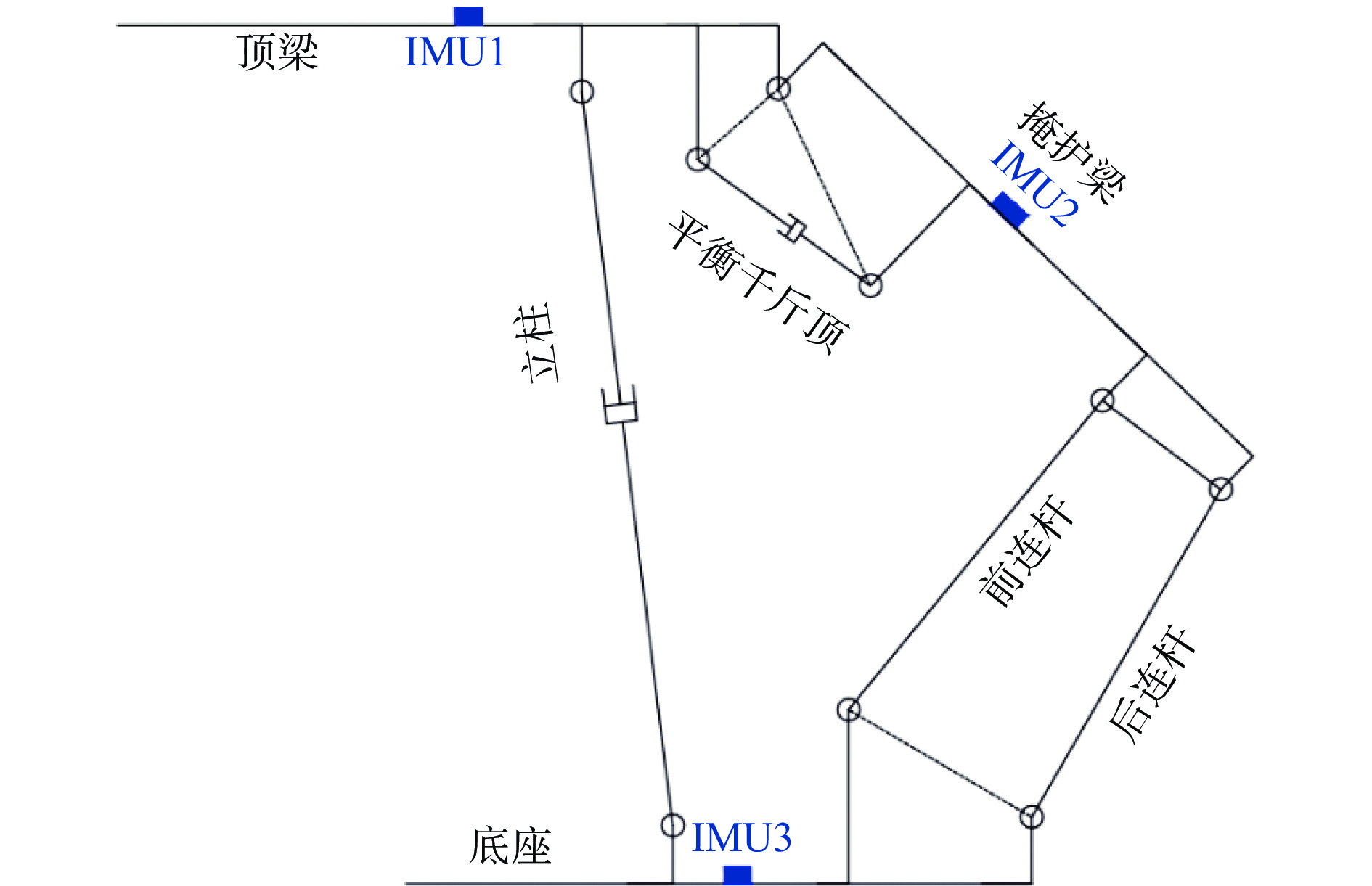
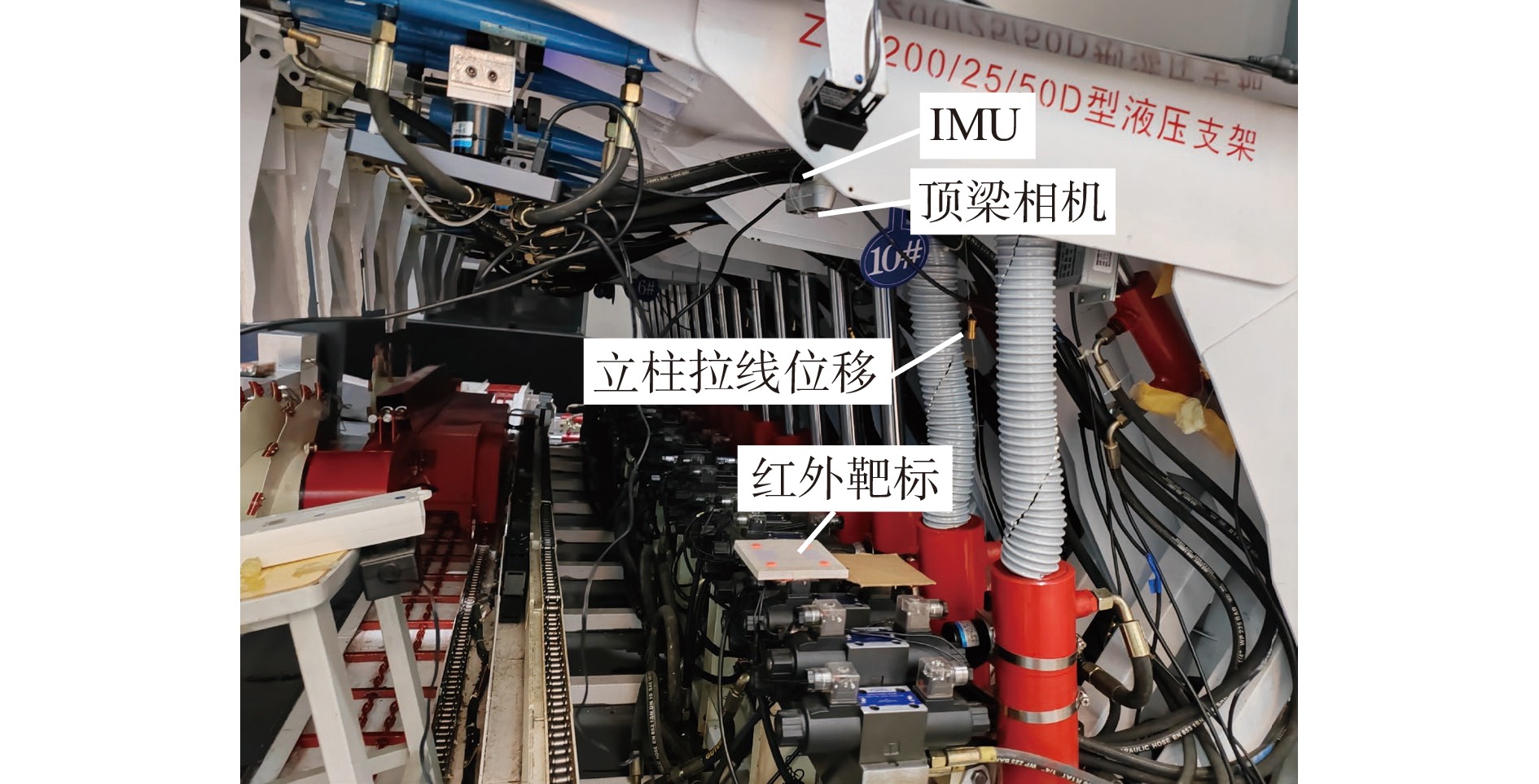
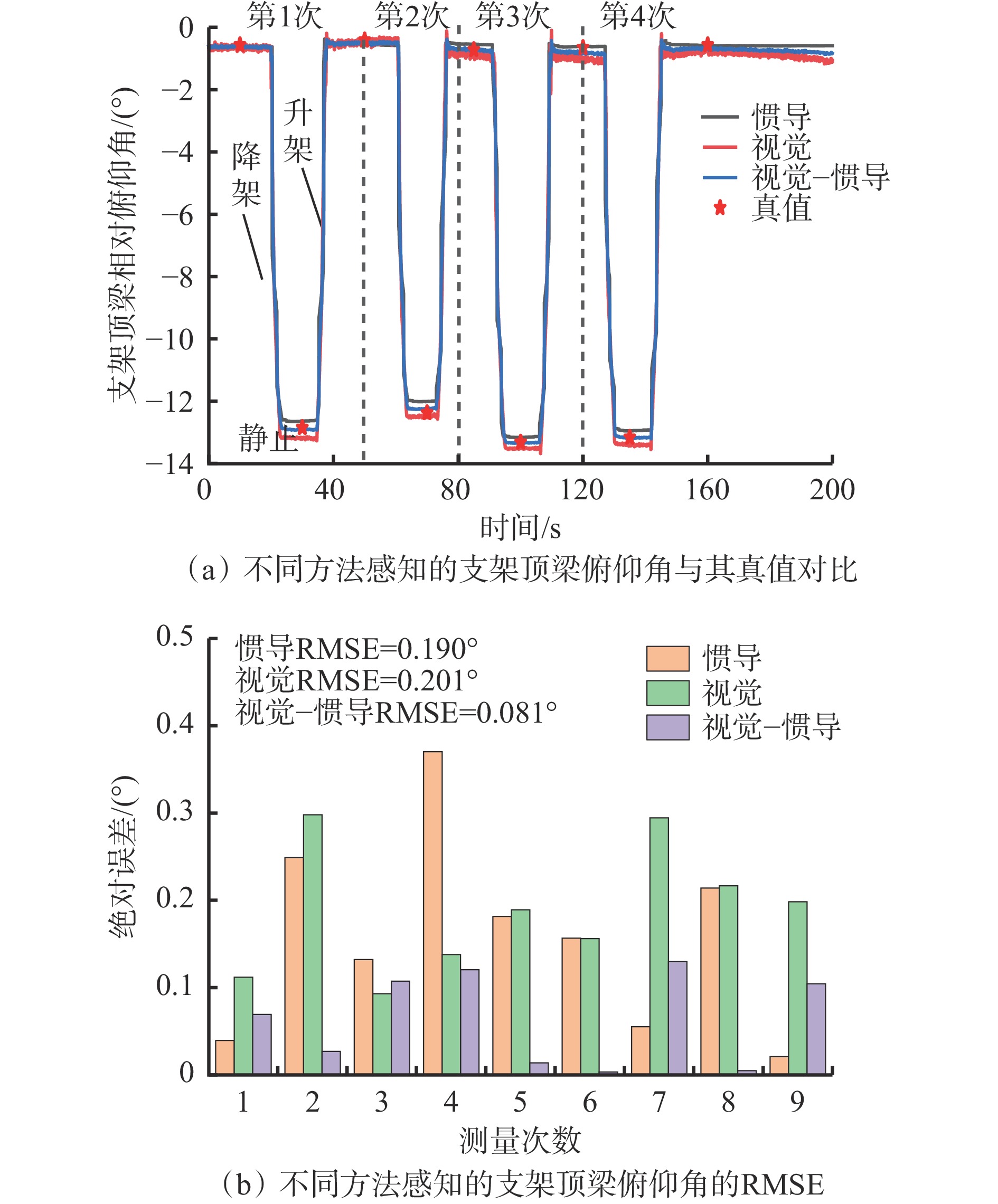
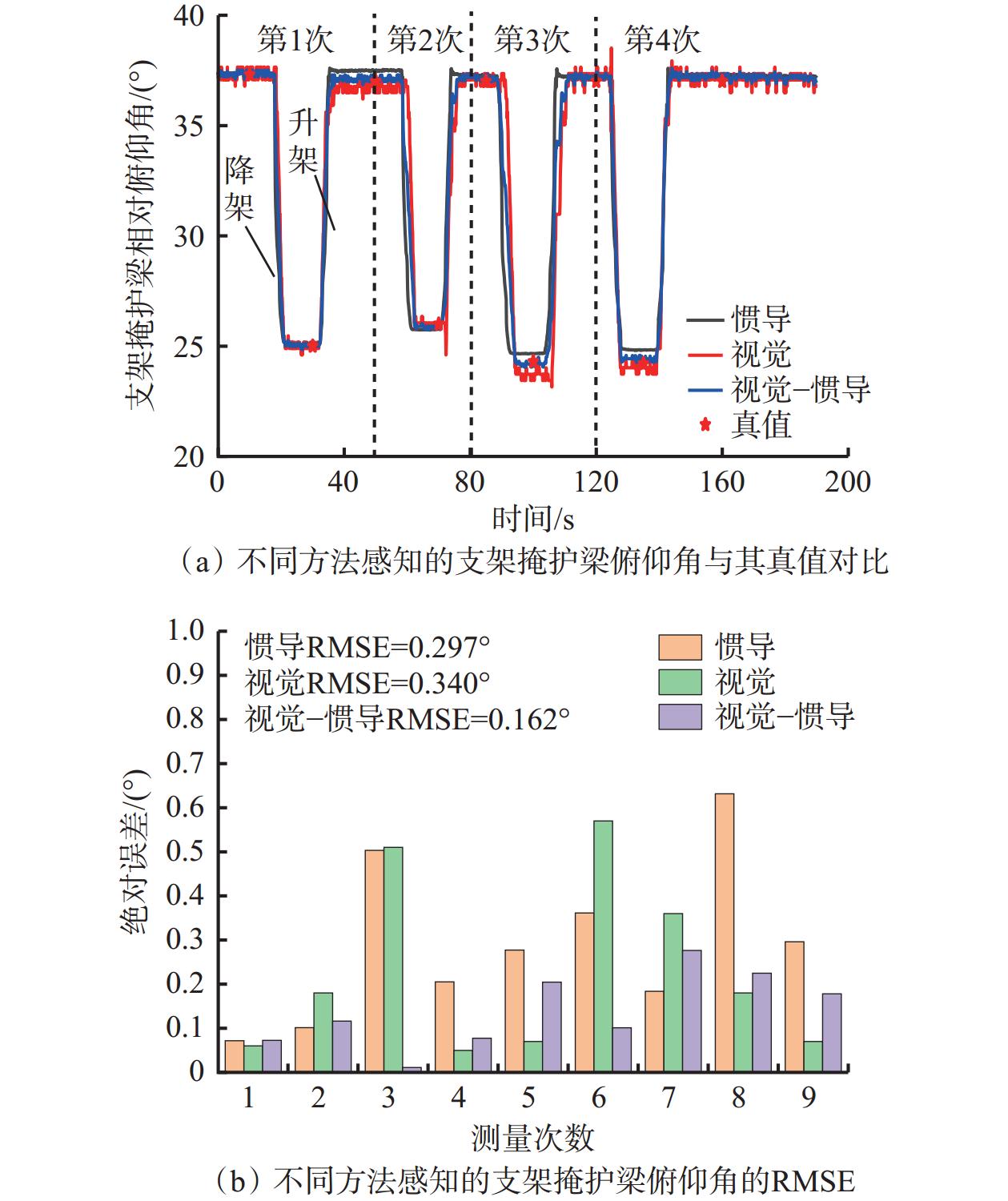
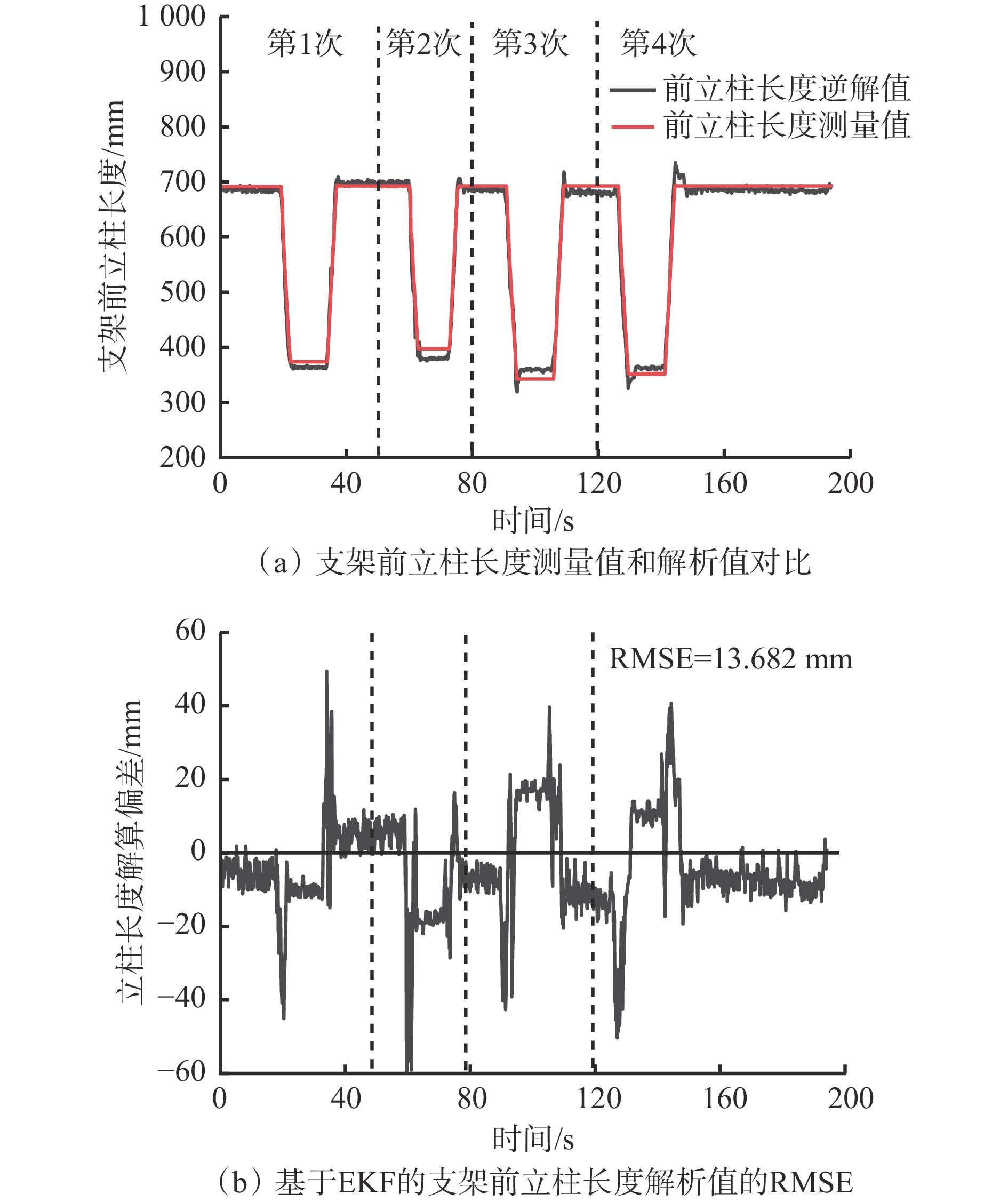
针对目前采场支架姿态感知中惯导方法存在漂移误差大、解算精度低,以及视觉方法存在相机易受粉尘与设备遮挡而位姿识别误差大等问题,提出了一种基于视觉−惯导信息融合的采场支架姿态感知方法。首先将四特征点红外标靶固定于支架底座凸台,将双目相机分别固定于支架顶梁与掩护梁,采用基于Ca...
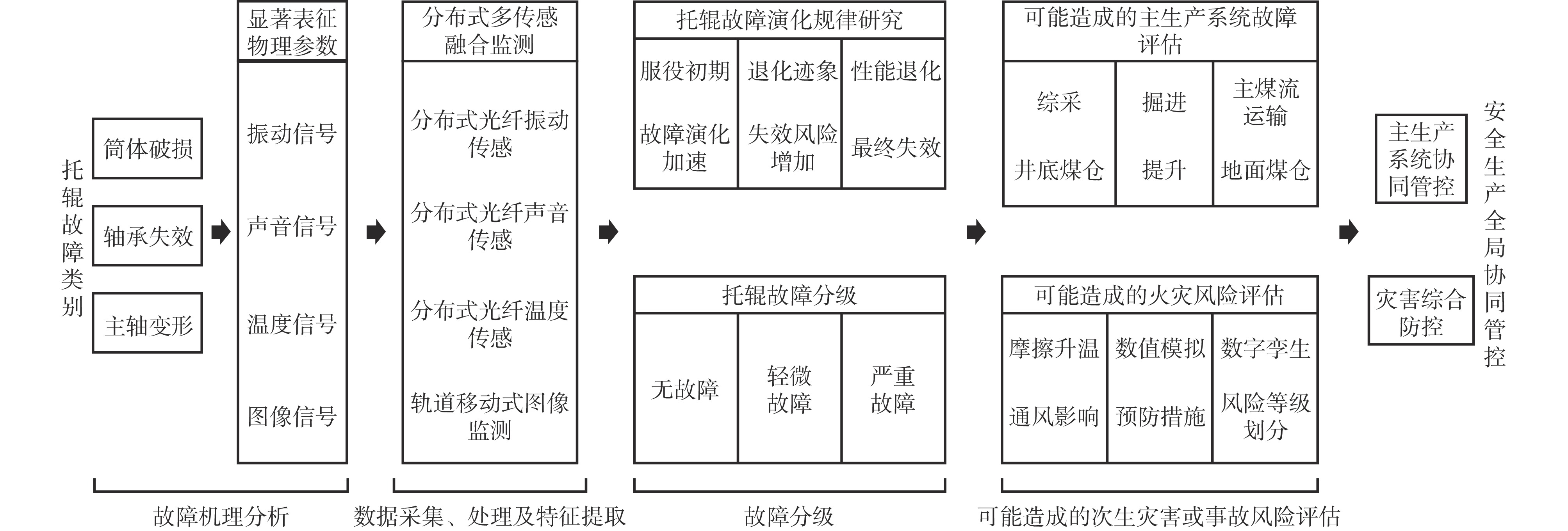
托辊作为带式输送机的关键部件,其故障频发严重影响煤矿生产效率与安全。目前国内外在托辊故障诊断技术和带式输送机管理控制策略方面开展了广泛研究,然而尚未形成一套被广泛认可且行之有效的监测与管控手段。通过分析托辊故障的类型及机理,指出井下带式输送机托辊故障诊断的特殊性及面临的挑...
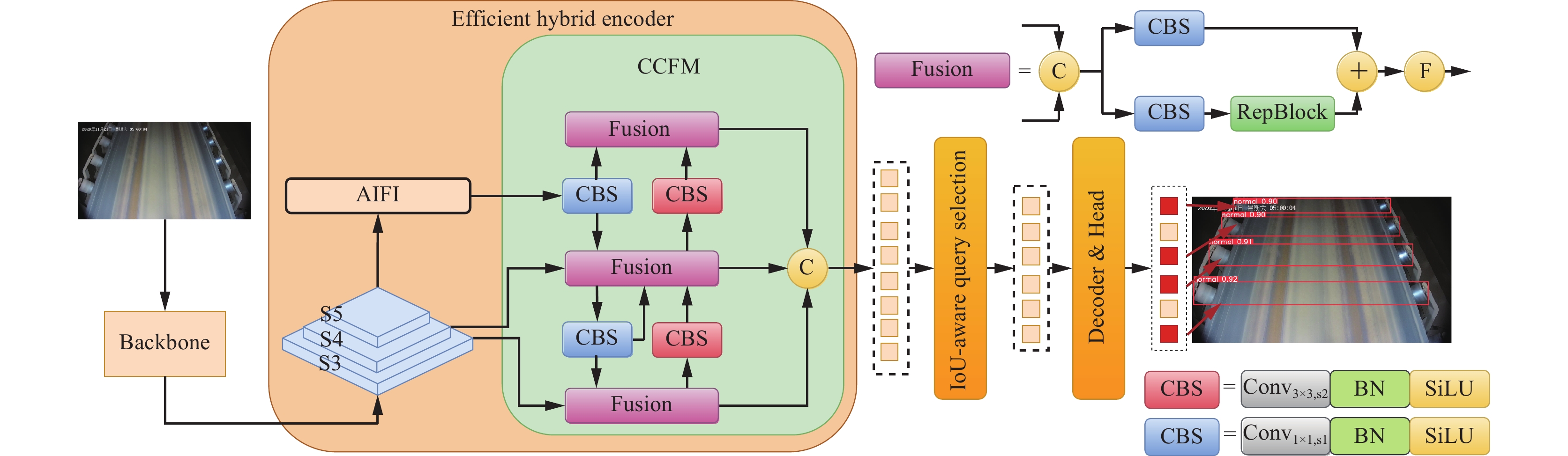
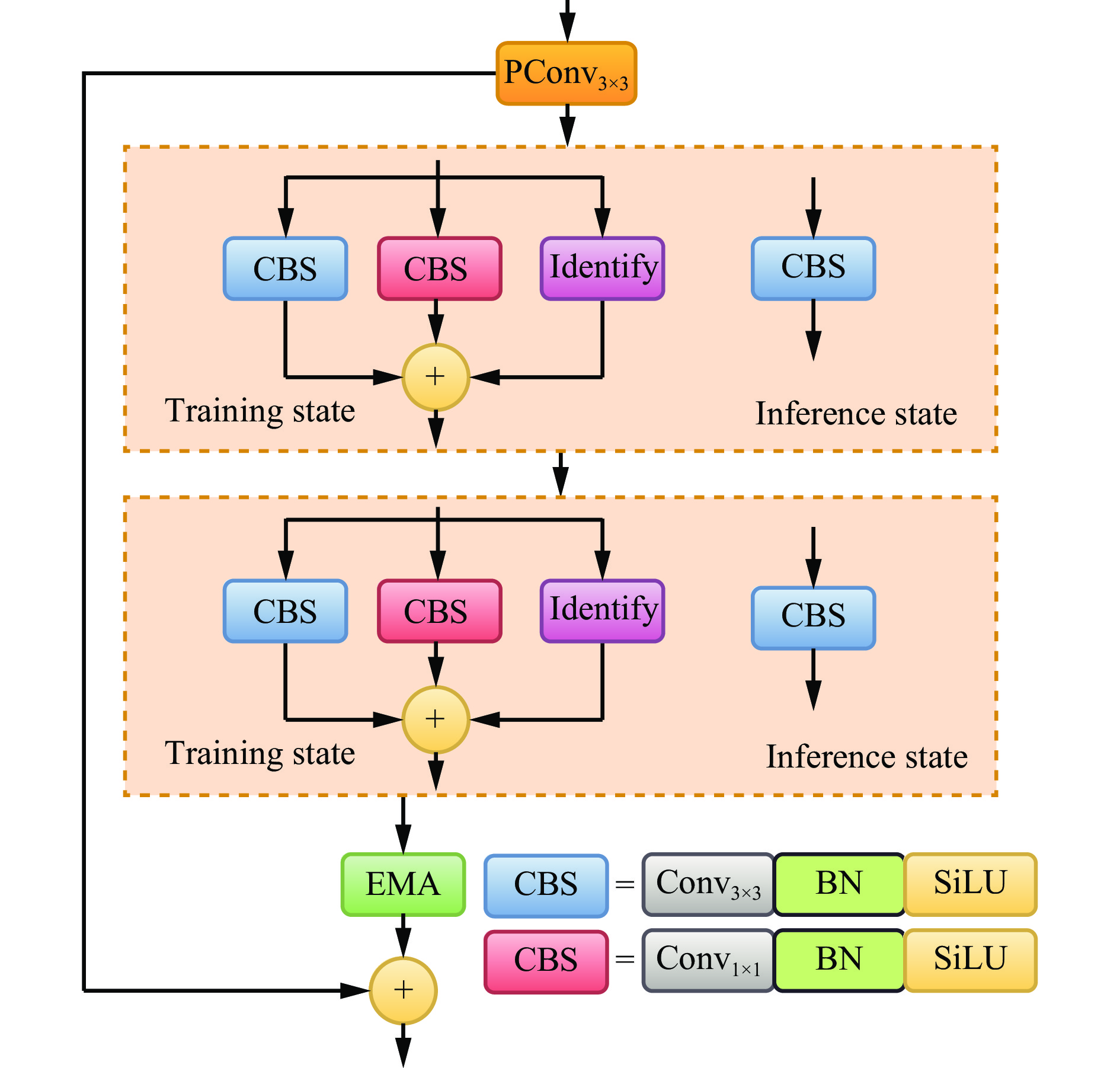
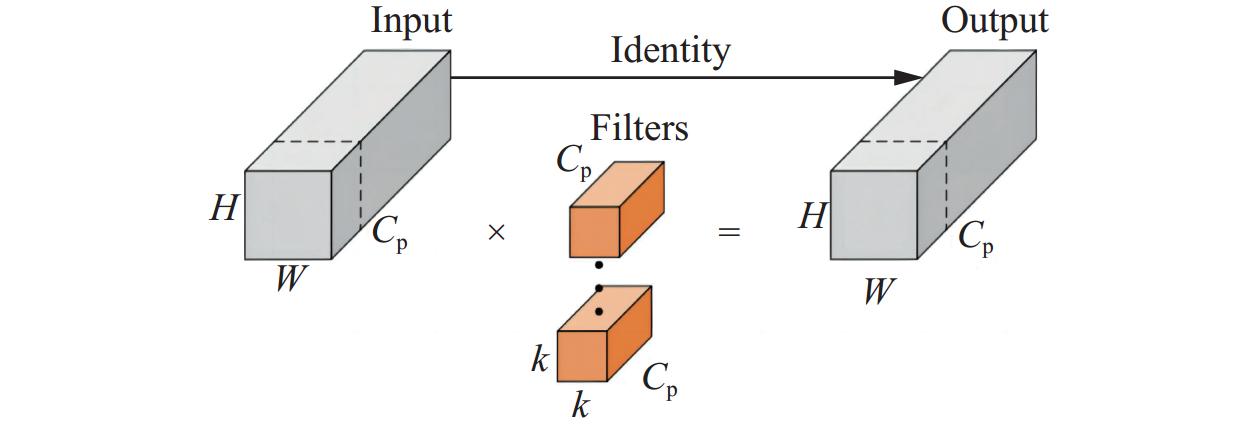
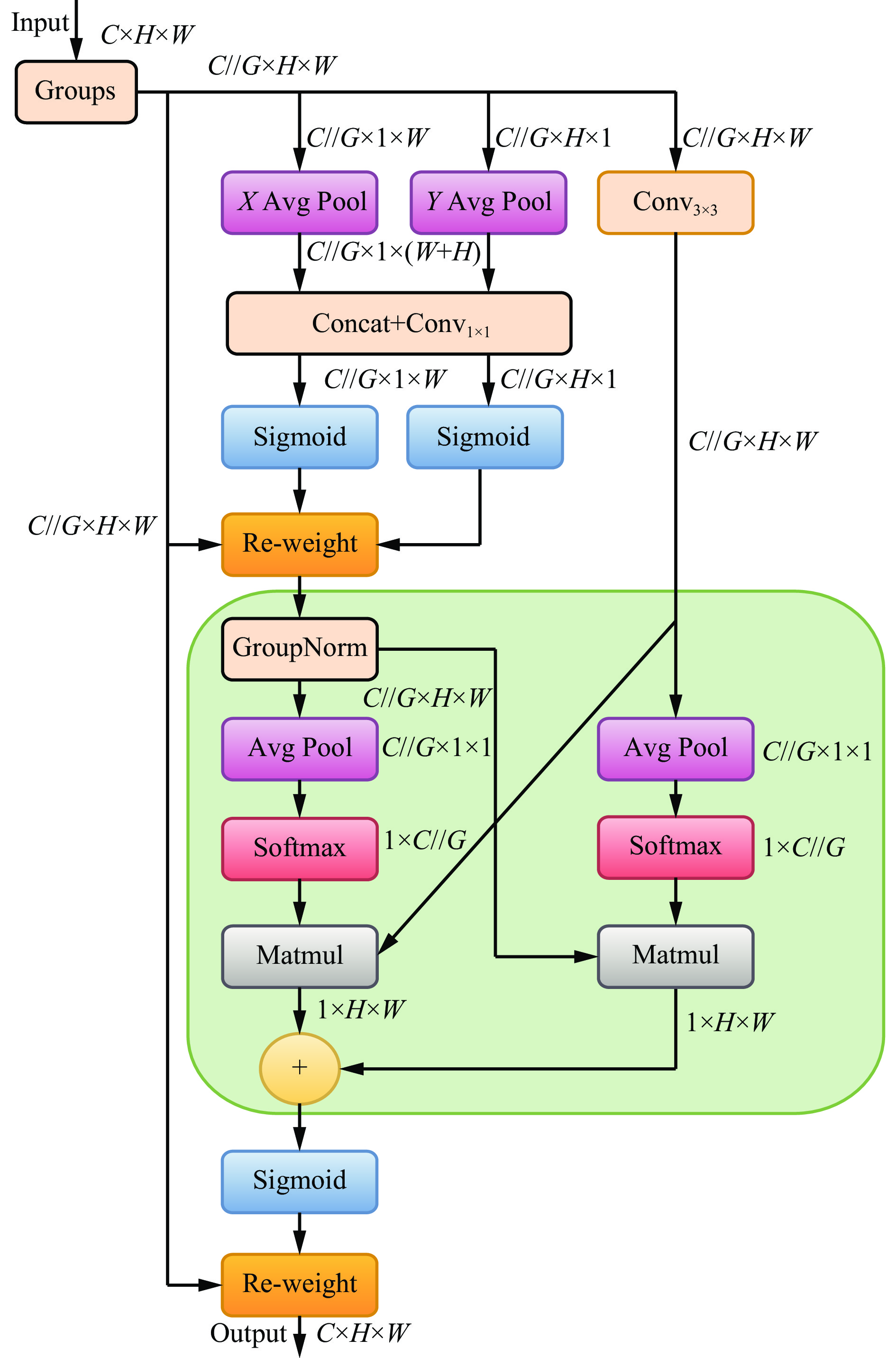
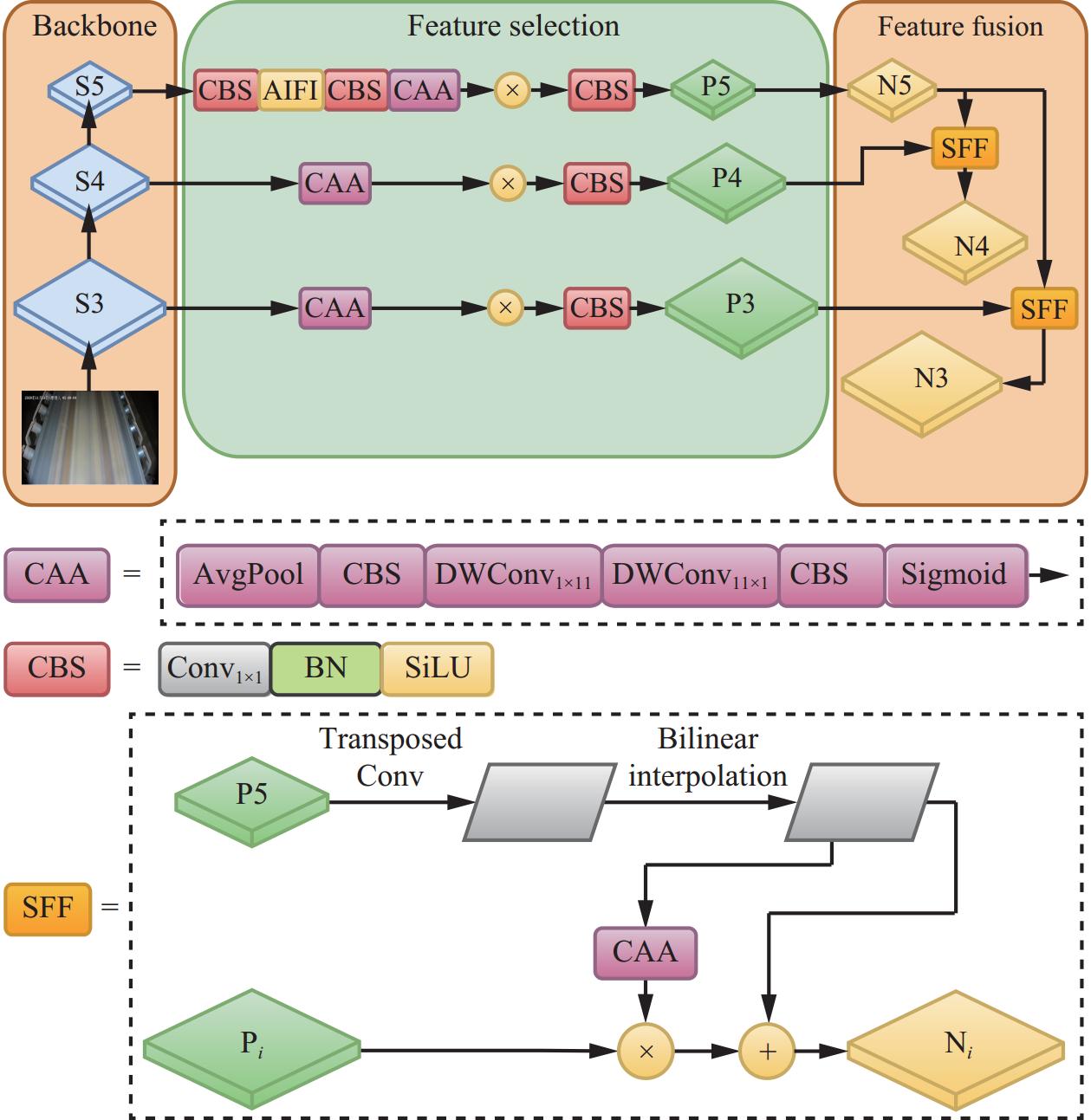
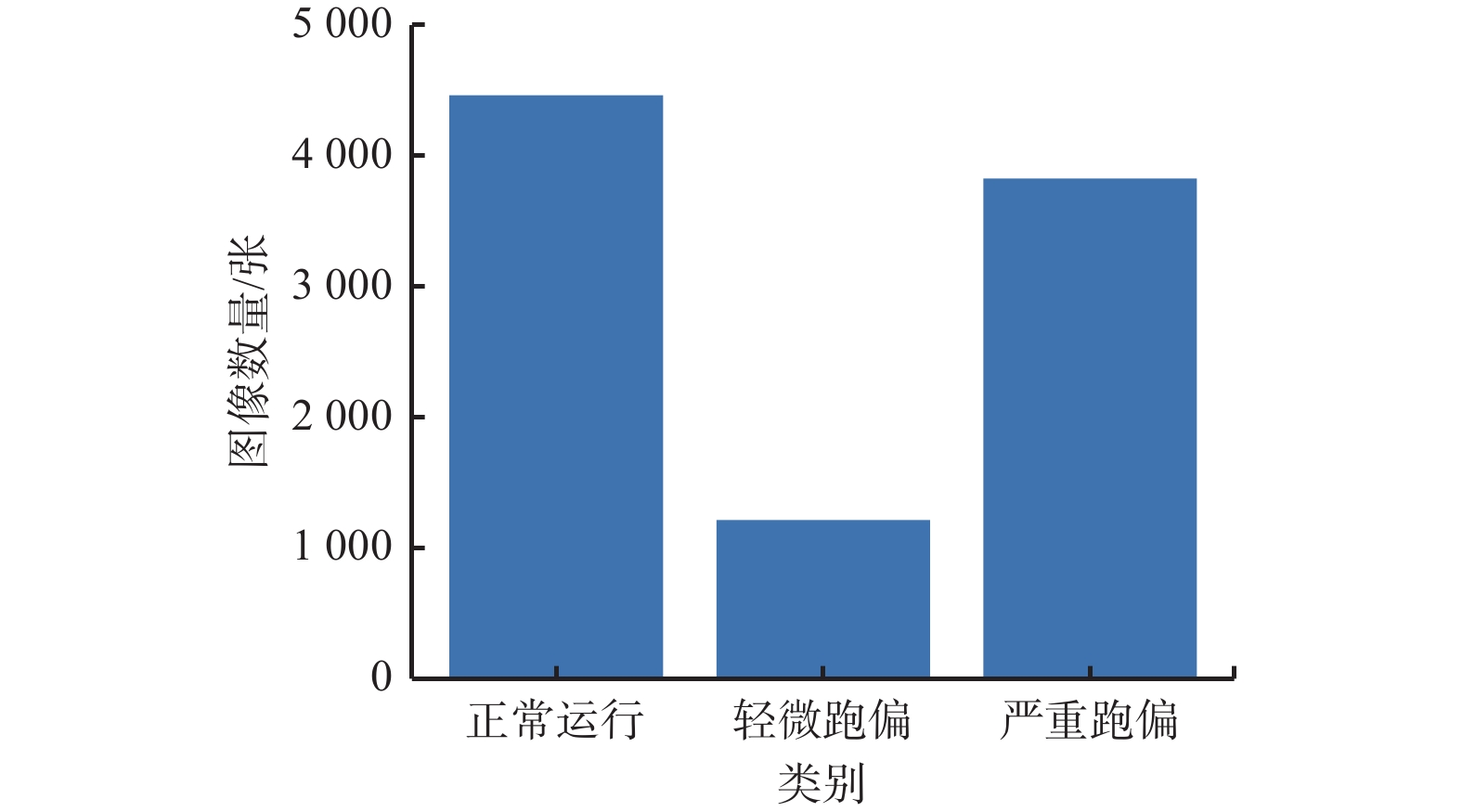
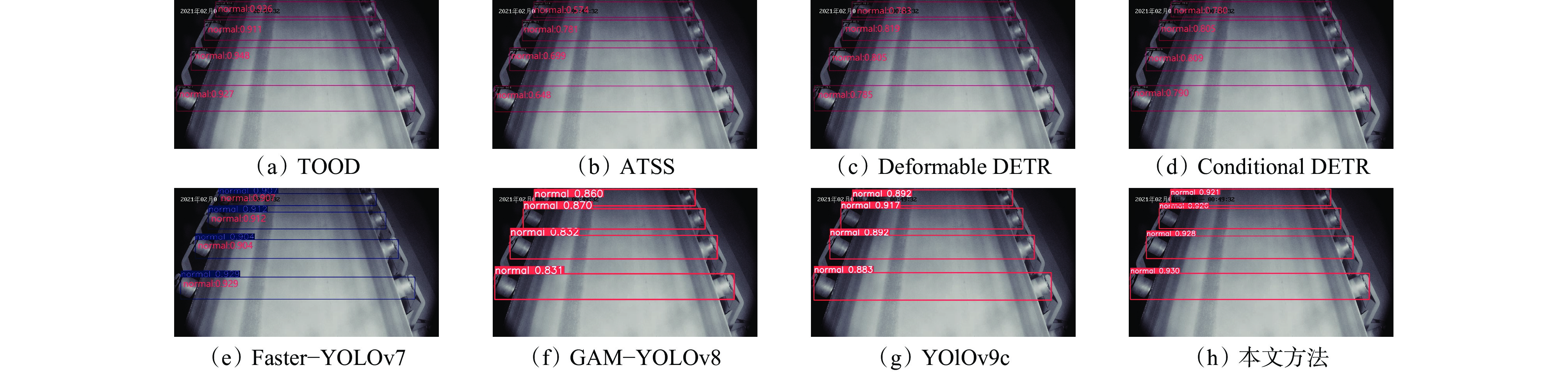
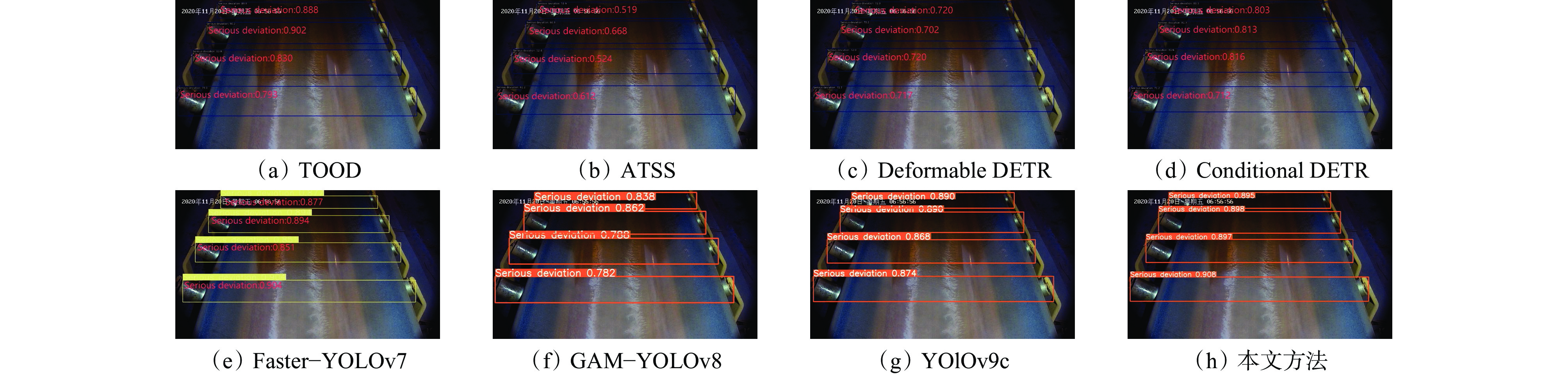
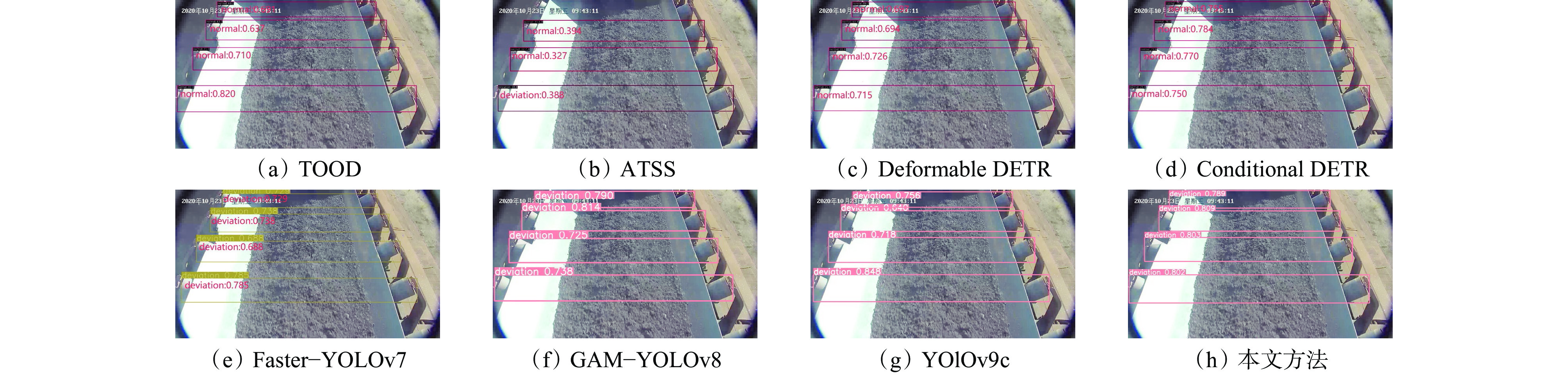
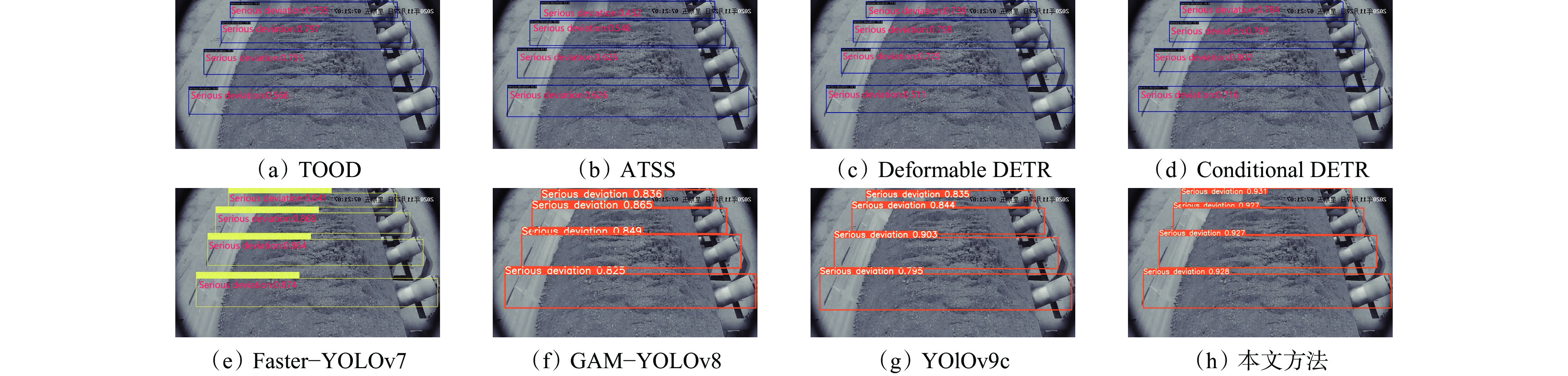
目前输送带跑偏检测研究主要集中于提取输送带边缘的直线特征,该方式需设定特定阈值,易受环境因素的制约,导致检测速度慢、精度不高。针对该问题,提出了一种基于改进RT−DETR的井下输送带跑偏故障检测算法,使用改进RT−DETR直接对一组托辊检测,根据左右托辊的暴露程度识别是否...
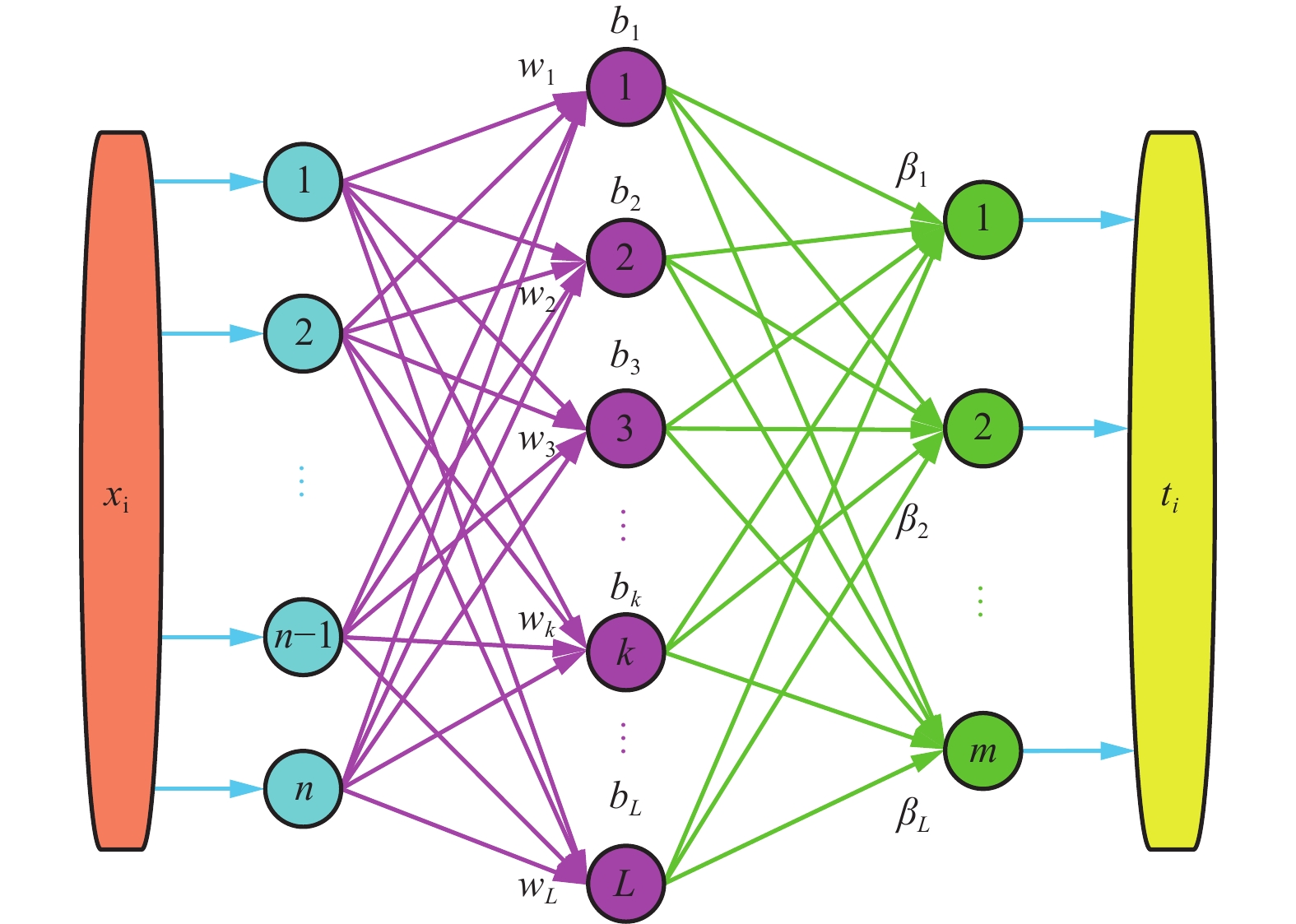
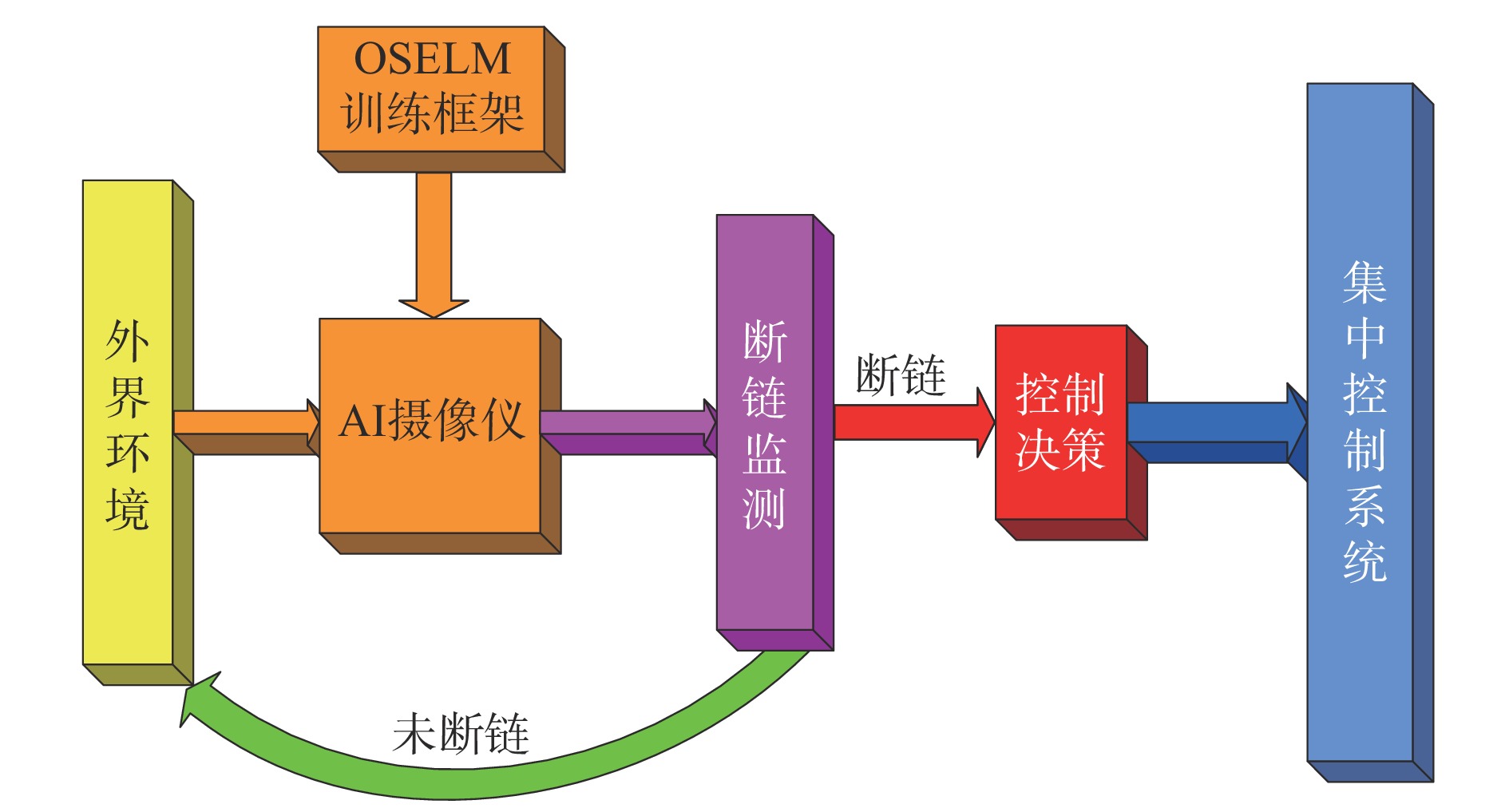
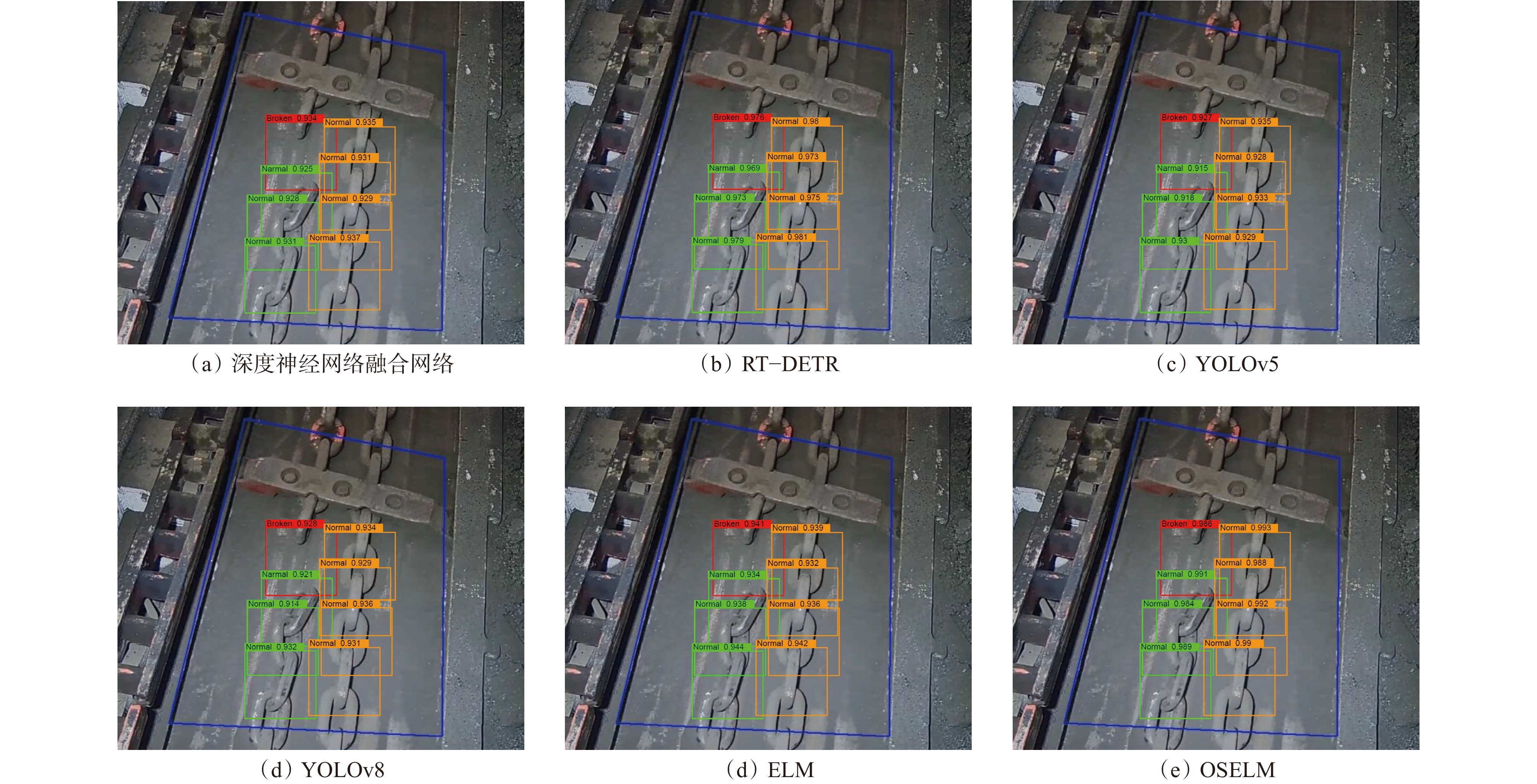
针对现有基于AI算法的煤矿井下刮板输送机断链监测技术在线学习能力低、检测精度差、稳定性低、复杂场景适应性和可靠性差等问题,通过在极限学习机(ELM)中增加增量式在线训练,设计了可实现离线样本和实时在线样本训练的在线贯序极限学习机(OSELM)网络,进而提出了基于OSELM...
| 地 址: | 江苏省常州市木梳路1号《工矿自动化》编辑部 |
| 邮 编: | 213015 |
| 主 编: | 田 华 Yonghui Li(Australia) |
| 副 主 编: | 王 晖 |
| 责任编辑: | 李 明 胡 娴 盛 男 郑海霞 |
| 编 务: | 张 聚 |
| 电 话: | 0519-86998515(编辑室),86998217(编务室) |
| 传 真: | 0519-86998098 |
| 电子邮箱: | editor@cari.com.cn |

工矿自动化微信号

工矿自动化视频号
本系统由 北京仁和汇智信息技术有限公司
开发 访问量:1150968