

最新录用栏目展示本刊经同行评议确定正式录用的文章,这些文章目前处在编校过程,尚未确定卷期及页码,但可以根据DOI进行引用。
当前状态:
, 最新更新时间:
摘要:
由于煤矿井下环境复杂,导致监控设备采集到的图像受煤尘、水雾影响出现模糊退化现象,目前的图像清晰化算法对井下尘雾图像的处理大多存在图像偏暗、细节丢失和过度增强等问题。针对上述问题,本文提出一种基于增强网格网络的井下尘雾图像清晰化算法,该算法由前处理模块、主干模块和图像输出模块三部分组成。首先,尘雾图像经前处理模块生成一组特征图作为主干模块的输入,而后特征图经主干网格网络进行基于注意力的多尺度变换,以充分提取图像不同尺度的特征,最后图像输出模块将融合的特征信息进行处理,输出清晰化图像。训练过程中先运用现有合成数据集对网络进行初步训练,再加入井下自建数据集对网络进行二次训练。实验结果表明,相较于暗通道先验算法等6种有代表性的清晰化算法,本文算法在主客观评价方面都有不同程度的提高,表明本文算法能够有效提升井下尘雾图像的清晰度和可视化效果。
由于煤矿井下环境复杂,导致监控设备采集到的图像受煤尘、水雾影响出现模糊退化现象,目前的图像清晰化算法对井下尘雾图像的处理大多存在图像偏暗、细节丢失和过度增强等问题。针对上述问题,本文提出一种基于增强网格网络的井下尘雾图像清晰化算法,该算法由前处理模块、主干模块和图像输出模块三部分组成。首先,尘雾图像经前处理模块生成一组特征图作为主干模块的输入,而后特征图经主干网格网络进行基于注意力的多尺度变换,以充分提取图像不同尺度的特征,最后图像输出模块将融合的特征信息进行处理,输出清晰化图像。训练过程中先运用现有合成数据集对网络进行初步训练,再加入井下自建数据集对网络进行二次训练。实验结果表明,相较于暗通道先验算法等6种有代表性的清晰化算法,本文算法在主客观评价方面都有不同程度的提高,表明本文算法能够有效提升井下尘雾图像的清晰度和可视化效果。
<摘要>(0)
当前状态:
, 最新更新时间:
摘要:
综掘工作面割煤过程产尘是煤矿井下重要的粉尘污染源,对作业人员生命健康和矿井安全生产造成威胁。为掌握气幕控尘参数对综掘工作面粉尘污染的影响,对不同径向分风流量和负压控尘流量条件下的风流场演变和粉尘场扩散开展了数值模拟研究。结果表明:径向分风流量主要影响轴向射流场的卷吸效应,负压控尘流量主要影响工作面的负压强度,径向分风流量及负压控尘流量越大,巷道压、抽风侧风流流量及风速分布越均匀,流场整体转变为指向工作面的轴向,粉尘扩散距离随之减小,掘进司机处粉尘质量浓度随之降低,拟合获得粉尘扩散距离和掘进司机处粉尘质量浓度与径向分风流量比例和负压控尘流量比例间的数学关系。在此基础上,确定综掘工作面气幕控尘优化参数:径向分风流量为288m3/min,负压控尘流量为426m3/min。经现场实测,结果显示应用优化参数后,掘进司机处降尘率达93.5%,人员作业环境得到明显改善。
综掘工作面割煤过程产尘是煤矿井下重要的粉尘污染源,对作业人员生命健康和矿井安全生产造成威胁。为掌握气幕控尘参数对综掘工作面粉尘污染的影响,对不同径向分风流量和负压控尘流量条件下的风流场演变和粉尘场扩散开展了数值模拟研究。结果表明:径向分风流量主要影响轴向射流场的卷吸效应,负压控尘流量主要影响工作面的负压强度,径向分风流量及负压控尘流量越大,巷道压、抽风侧风流流量及风速分布越均匀,流场整体转变为指向工作面的轴向,粉尘扩散距离随之减小,掘进司机处粉尘质量浓度随之降低,拟合获得粉尘扩散距离和掘进司机处粉尘质量浓度与径向分风流量比例和负压控尘流量比例间的数学关系。在此基础上,确定综掘工作面气幕控尘优化参数:径向分风流量为288m3/min,负压控尘流量为426m3/min。经现场实测,结果显示应用优化参数后,掘进司机处降尘率达93.5%,人员作业环境得到明显改善。
<摘要>(0)
当前状态:
, 最新更新时间:
摘要:
近年来,我国有关部门多次发布推进煤矿智能化建设的政策文件,要求将智能化技术与煤炭产业融合。无人驾驶作为当下热门的智能化技术,已被认为是煤矿智能化建设的重要手段。无人驾驶包括环境感知、定位建图、规划决策、自动控制等几大环节,其中,定位建图是各环节的前提与基础。SLAM是目前主流的定位建图技术,已针对地面、室内环境进行多年研究,并在多领域得到应用;但目前针对矿山复杂环境的研究尚处于起始阶段,具有广阔的发展前景。为推动SLAM技术在矿山无人驾驶领域的发展,对SLAM技术原理、成熟SLAM方案、现阶段矿山SLAM研究现状、未来矿山SLAM发展趋势进行了探讨。首先,明确了SLAM技术原理及框架;之后,由于SLAM技术在矿山无人驾驶领域的研究应用可借鉴地面成熟的技术方案,调研了目前地面具有代表性的SLAM方案,并根据所使用传感器,从视觉、激光以及多传感器融合三方面对其进行归类、分析与总结,得出了“多传感器融合是优化SLAM技术的重要手段”结论;接着,探究了现阶段矿山SLAM技术的研究现状,分析了视觉、激光、多传感器融合三种SLAM方案在井工煤矿、露天矿山的适用性与研究价值,得出了“多传感器融合SLAM是井工煤矿领域的最佳研究方案”、“SLAM技术在露天矿山领域研究价值不高”结论;最后基于前文分析,结合人工智能以及硬件发展趋势,提出矿山无人驾驶领域SLAM技术未来应向多传感器融合、固态化、智能化方向发展。
近年来,我国有关部门多次发布推进煤矿智能化建设的政策文件,要求将智能化技术与煤炭产业融合。无人驾驶作为当下热门的智能化技术,已被认为是煤矿智能化建设的重要手段。无人驾驶包括环境感知、定位建图、规划决策、自动控制等几大环节,其中,定位建图是各环节的前提与基础。SLAM是目前主流的定位建图技术,已针对地面、室内环境进行多年研究,并在多领域得到应用;但目前针对矿山复杂环境的研究尚处于起始阶段,具有广阔的发展前景。为推动SLAM技术在矿山无人驾驶领域的发展,对SLAM技术原理、成熟SLAM方案、现阶段矿山SLAM研究现状、未来矿山SLAM发展趋势进行了探讨。首先,明确了SLAM技术原理及框架;之后,由于SLAM技术在矿山无人驾驶领域的研究应用可借鉴地面成熟的技术方案,调研了目前地面具有代表性的SLAM方案,并根据所使用传感器,从视觉、激光以及多传感器融合三方面对其进行归类、分析与总结,得出了“多传感器融合是优化SLAM技术的重要手段”结论;接着,探究了现阶段矿山SLAM技术的研究现状,分析了视觉、激光、多传感器融合三种SLAM方案在井工煤矿、露天矿山的适用性与研究价值,得出了“多传感器融合SLAM是井工煤矿领域的最佳研究方案”、“SLAM技术在露天矿山领域研究价值不高”结论;最后基于前文分析,结合人工智能以及硬件发展趋势,提出矿山无人驾驶领域SLAM技术未来应向多传感器融合、固态化、智能化方向发展。
<摘要>(0)
当前状态:
, 最新更新时间:
摘要:
在矿山井下斜坡道运输过程中,由于路况不良和线路复杂,常出现管控薄弱、错车困难、堵车、顶牛等问题,严重影响了井下运输安全和工作效率。本文针对这些问题,提出并分析了基于UWB精确定位技术的井下斜坡道运输交通管控系统的控制原理。然而,由于UWB定位技术的动态精度不足以及车辆定位卡采样间隔长和数据丢失等问题,传统闭锁控制的效果较差。为了解决这些问题,本文提出了一种结合强跟踪自适应卡尔曼滤波与到位时间预测的算法,并设计了状态观测器以评估改后控制性能和效果。实验结果表明,经过算法改良后,系统的动态与静态位置误差分别提高25.67%和27.19%;速度动态与静态误差分别提高25.28%和34.73%,信号灯门限逻辑的响应时间更快,闭锁有效率达到99.5%,显著提升了井下斜坡道运输交通管控系统的实时性和控制可靠性。
在矿山井下斜坡道运输过程中,由于路况不良和线路复杂,常出现管控薄弱、错车困难、堵车、顶牛等问题,严重影响了井下运输安全和工作效率。本文针对这些问题,提出并分析了基于UWB精确定位技术的井下斜坡道运输交通管控系统的控制原理。然而,由于UWB定位技术的动态精度不足以及车辆定位卡采样间隔长和数据丢失等问题,传统闭锁控制的效果较差。为了解决这些问题,本文提出了一种结合强跟踪自适应卡尔曼滤波与到位时间预测的算法,并设计了状态观测器以评估改后控制性能和效果。实验结果表明,经过算法改良后,系统的动态与静态位置误差分别提高25.67%和27.19%;速度动态与静态误差分别提高25.28%和34.73%,信号灯门限逻辑的响应时间更快,闭锁有效率达到99.5%,显著提升了井下斜坡道运输交通管控系统的实时性和控制可靠性。
<摘要>(0)
当前状态:
, 最新更新时间:
摘要:
煤炭工业作为我国的支柱产业,为国民经济的发展做出了突出贡献。然而,煤矿开采过程中产生的粉尘污染问题严重影响了井下工作人员的健康和生产安全。为了解决这一问题,基于康达效应对传统的长压短抽式通风除尘系统进行了改进,并通过卷积神经网络对改进后的系统进行智能参数优化。通过有限元建模仿真与对改进康达效应通风除尘系统进行参数优化与验证,结果表明,改进后的除尘系统在压抽比2:3时达到最好的除尘效果,且相较于相同风压比下的长压短抽式通风除尘系统,改进后的系统在司机处及下风侧处平面下的平均粉尘浓度分别降低了5.56%和55.41%。通过搭建等比例缩小的改进康达效应通风除尘系统实验平台收集除尘调控参数,进一步利用神经网络模型对不同除尘调控参数下的粉尘浓度进行预测从而实现参数智能优化,实现了不同初始粉尘浓度最佳除尘效果调控参数的预测与验证。得出改进康达效应的综掘面同分除尘系统在初始粉尘浓度为900 mg·m-3下使用第6组调控方案时除尘效率最高、司机处和下风侧处的粉尘浓度分别下降了80.35%和87.42%。结果表明改进康达效应的综掘面通风除尘系统通过卷积神经网络智能参数调控后具有较高的除尘效率。
煤炭工业作为我国的支柱产业,为国民经济的发展做出了突出贡献。然而,煤矿开采过程中产生的粉尘污染问题严重影响了井下工作人员的健康和生产安全。为了解决这一问题,基于康达效应对传统的长压短抽式通风除尘系统进行了改进,并通过卷积神经网络对改进后的系统进行智能参数优化。通过有限元建模仿真与对改进康达效应通风除尘系统进行参数优化与验证,结果表明,改进后的除尘系统在压抽比2:3时达到最好的除尘效果,且相较于相同风压比下的长压短抽式通风除尘系统,改进后的系统在司机处及下风侧处平面下的平均粉尘浓度分别降低了5.56%和55.41%。通过搭建等比例缩小的改进康达效应通风除尘系统实验平台收集除尘调控参数,进一步利用神经网络模型对不同除尘调控参数下的粉尘浓度进行预测从而实现参数智能优化,实现了不同初始粉尘浓度最佳除尘效果调控参数的预测与验证。得出改进康达效应的综掘面同分除尘系统在初始粉尘浓度为900 mg·m-3下使用第6组调控方案时除尘效率最高、司机处和下风侧处的粉尘浓度分别下降了80.35%和87.42%。结果表明改进康达效应的综掘面通风除尘系统通过卷积神经网络智能参数调控后具有较高的除尘效率。
<摘要>(0)
当前状态:
, 最新更新时间:
摘要:
为解决综掘面降尘措施难以合理利用的问题,本文提出了一种基于本征正交分解(POD)与机器学习的综掘面流场快速预测算法,该算法首先利用POD将多种工况下风流场数据或粉尘浓度数据进行降维,得到流场工况的基函数模态与模态系数,通过机器学习方法预测不同工况下占总能量达到90%以上的模态系数,从而对未知工况的模态系数进行预测,利用预测得到的模态系数与基函数模态进行重构便可得到未知工况的风流场数据或粉尘浓度场。通过对比得到支持向量机模型对模态系数的预测能力优于其他模型。通过综掘面300种工况下的数值模拟结果作为数据样本,使用支持向量机模型对风流场与粉尘浓度场进行预测仅需数值模拟花费时间的1/816,且对比60种工况下的预测结果与数值模拟结果可知:各网格的风流速度相对误差为0.36m/s,粉尘浓度相对误差为86.24mg/m3。
为解决综掘面降尘措施难以合理利用的问题,本文提出了一种基于本征正交分解(POD)与机器学习的综掘面流场快速预测算法,该算法首先利用POD将多种工况下风流场数据或粉尘浓度数据进行降维,得到流场工况的基函数模态与模态系数,通过机器学习方法预测不同工况下占总能量达到90%以上的模态系数,从而对未知工况的模态系数进行预测,利用预测得到的模态系数与基函数模态进行重构便可得到未知工况的风流场数据或粉尘浓度场。通过对比得到支持向量机模型对模态系数的预测能力优于其他模型。通过综掘面300种工况下的数值模拟结果作为数据样本,使用支持向量机模型对风流场与粉尘浓度场进行预测仅需数值模拟花费时间的1/816,且对比60种工况下的预测结果与数值模拟结果可知:各网格的风流速度相对误差为0.36m/s,粉尘浓度相对误差为86.24mg/m3。
<摘要>(0)
当前状态:
, 最新更新时间: ,
doi: 10.13272/j.issn.1671-251x.2024070055
摘要:
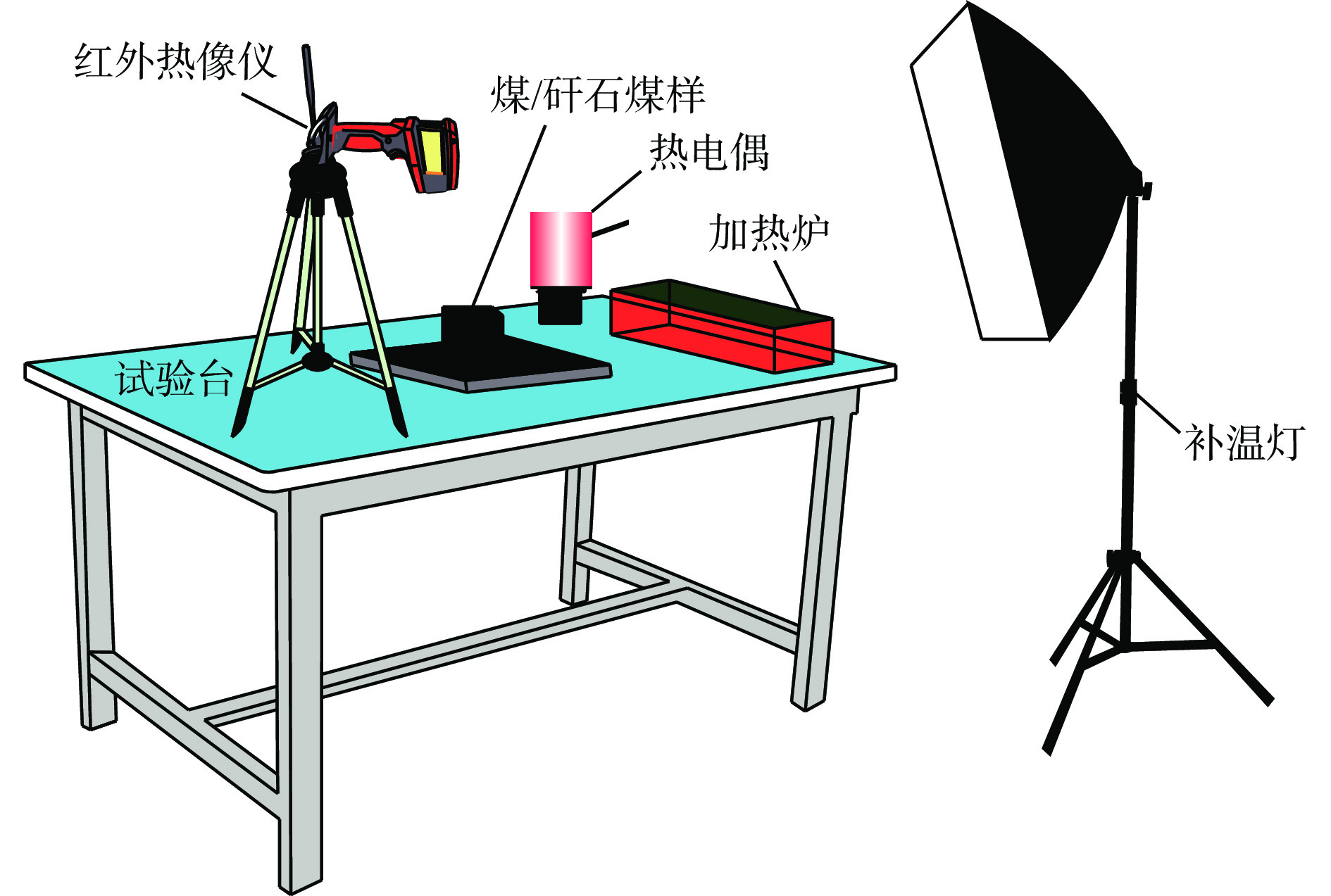
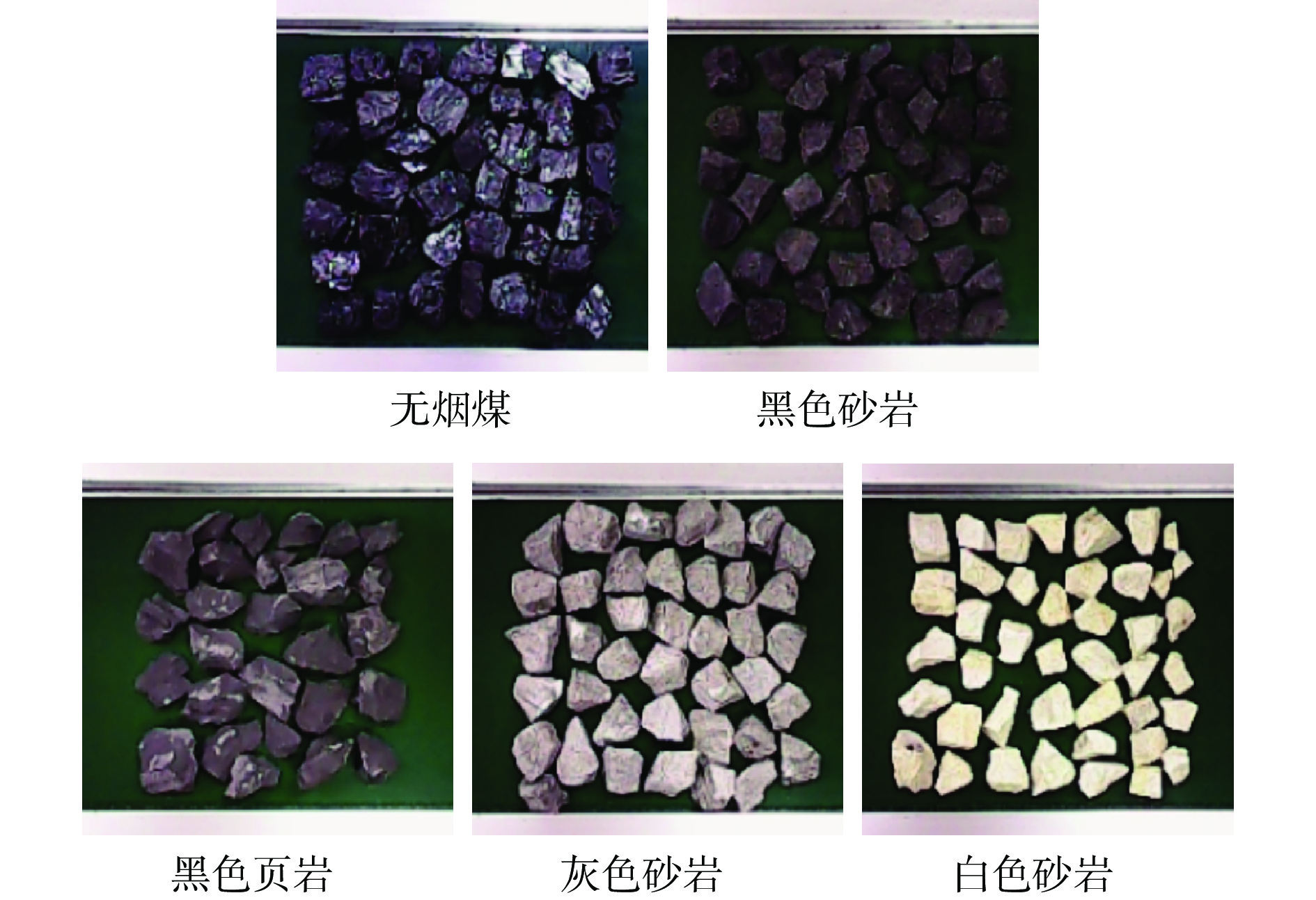
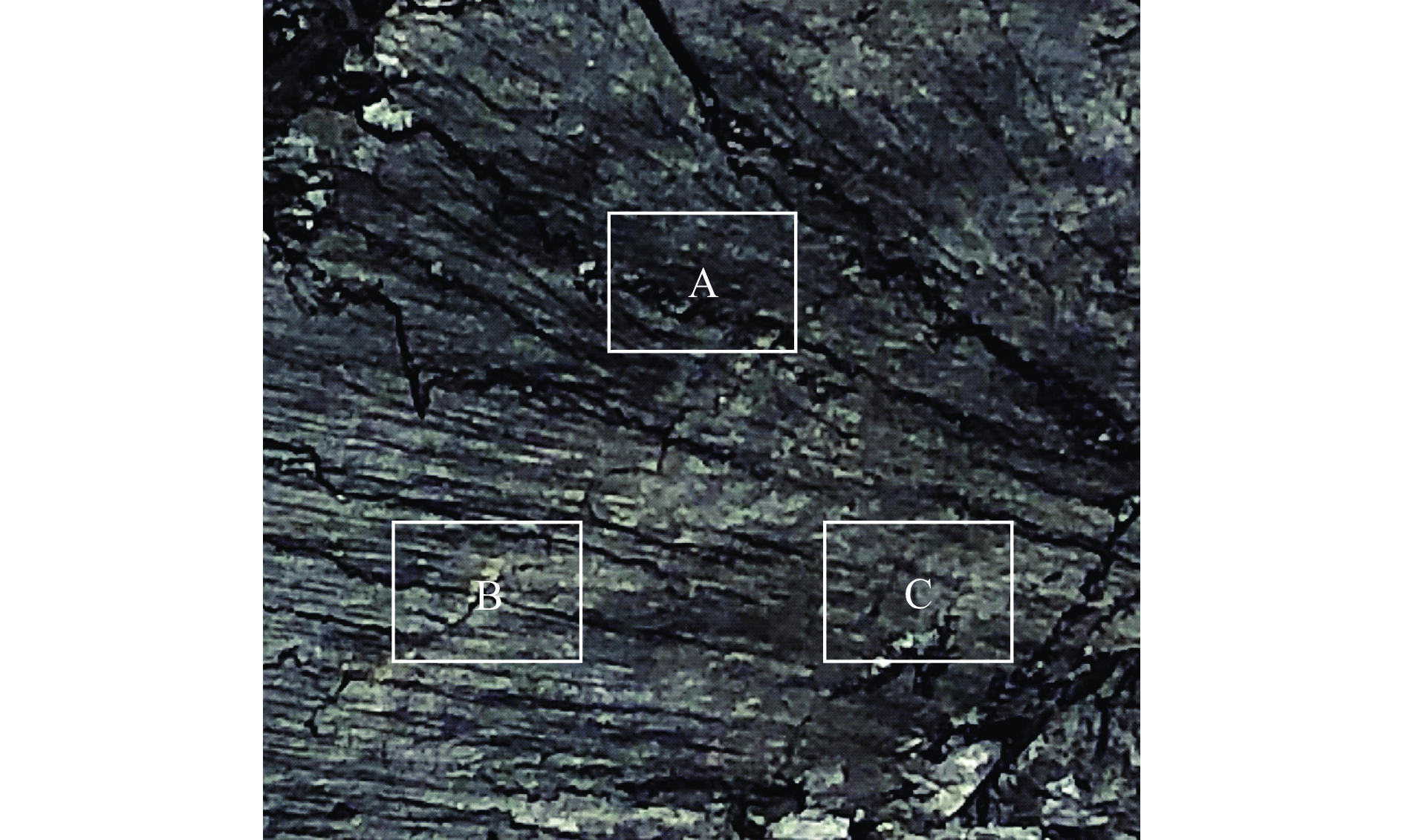
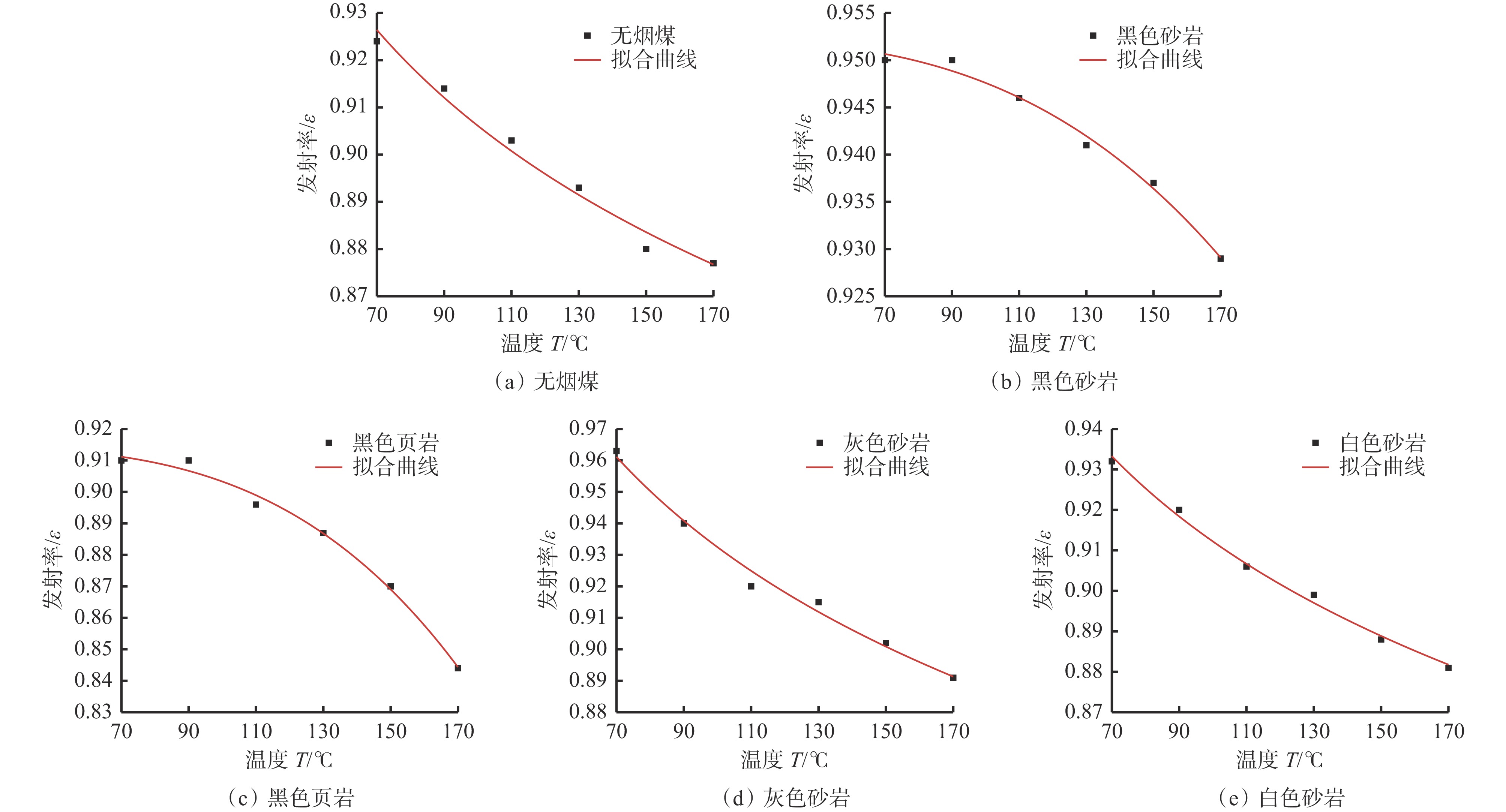
煤和矸石的种类、表面纹理结构、变质和发育程度等因素都会对其发射率产生较为显著影响,精准的发射率参数设置对红外仪测温及煤和矸石红外图像的识别至关重要。针对该问题,提出了一种基于匹配法的煤和矸石发射率测量方法,即采用表面热电偶与红外热像仪相结合的方式测量煤和矸石发射率。用密闭的电热炉对被测煤和矸石进行均匀加热,待被测煤和矸石均匀受热且稳定后,用表面热电偶对被测煤和矸石的选定区域进行真实温度测定(标定为T1),然后用红外热像仪对被测煤和矸石选定的同一区域进行温度测定(标定为T2),最后对红外热像仪的发射率进行调试,当T2=T1时,得出的发射率即为被测煤和矸石在该温度下的真实发射率。实验结果表明:① 等温条件下,煤和矸石表面越粗糙,其发射率数值越大,表明煤和矸石表面的粗糙度是制约两者产生不同发射率的内在因素。② 4种不同种类煤和矸石发射率随温度的增大呈幂函数降低,且拟合函数相关系数R2达0.98以上,验证了匹配法应用于煤和矸石发射率测量的可行性。③ 采用反代法得出在不同温度条件下实测值与理论值的误差率均小于3%,验证了实验中测量的煤和矸石发射率的准确性。
煤和矸石的种类、表面纹理结构、变质和发育程度等因素都会对其发射率产生较为显著影响,精准的发射率参数设置对红外仪测温及煤和矸石红外图像的识别至关重要。针对该问题,提出了一种基于匹配法的煤和矸石发射率测量方法,即采用表面热电偶与红外热像仪相结合的方式测量煤和矸石发射率。用密闭的电热炉对被测煤和矸石进行均匀加热,待被测煤和矸石均匀受热且稳定后,用表面热电偶对被测煤和矸石的选定区域进行真实温度测定(标定为T1),然后用红外热像仪对被测煤和矸石选定的同一区域进行温度测定(标定为T2),最后对红外热像仪的发射率进行调试,当T2=T1时,得出的发射率即为被测煤和矸石在该温度下的真实发射率。实验结果表明:① 等温条件下,煤和矸石表面越粗糙,其发射率数值越大,表明煤和矸石表面的粗糙度是制约两者产生不同发射率的内在因素。② 4种不同种类煤和矸石发射率随温度的增大呈幂函数降低,且拟合函数相关系数R2达0.98以上,验证了匹配法应用于煤和矸石发射率测量的可行性。③ 采用反代法得出在不同温度条件下实测值与理论值的误差率均小于3%,验证了实验中测量的煤和矸石发射率的准确性。

当前状态:
, 最新更新时间: ,
doi: 10.13272/j.issn.1671-251x.2024070085
摘要:
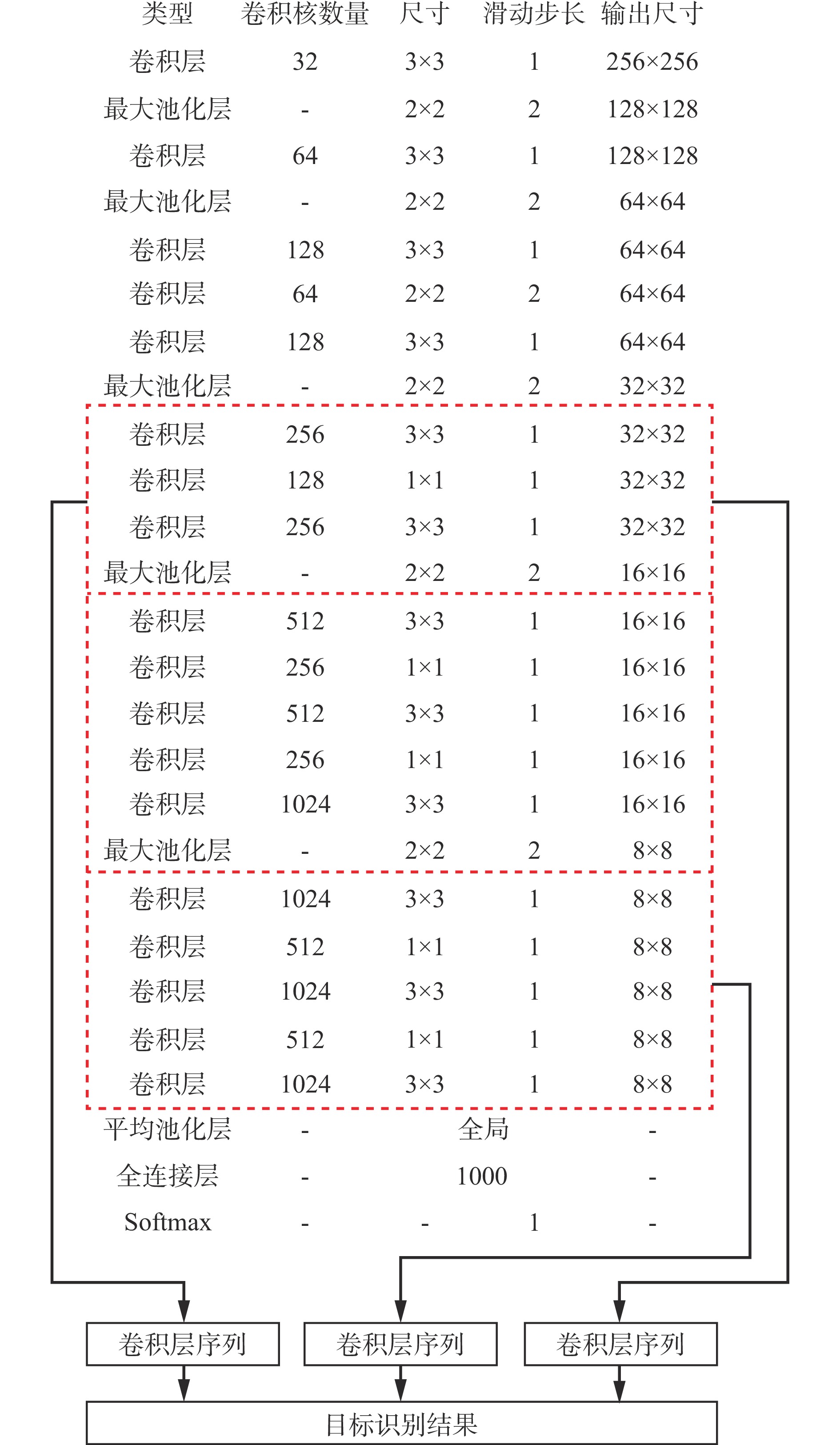
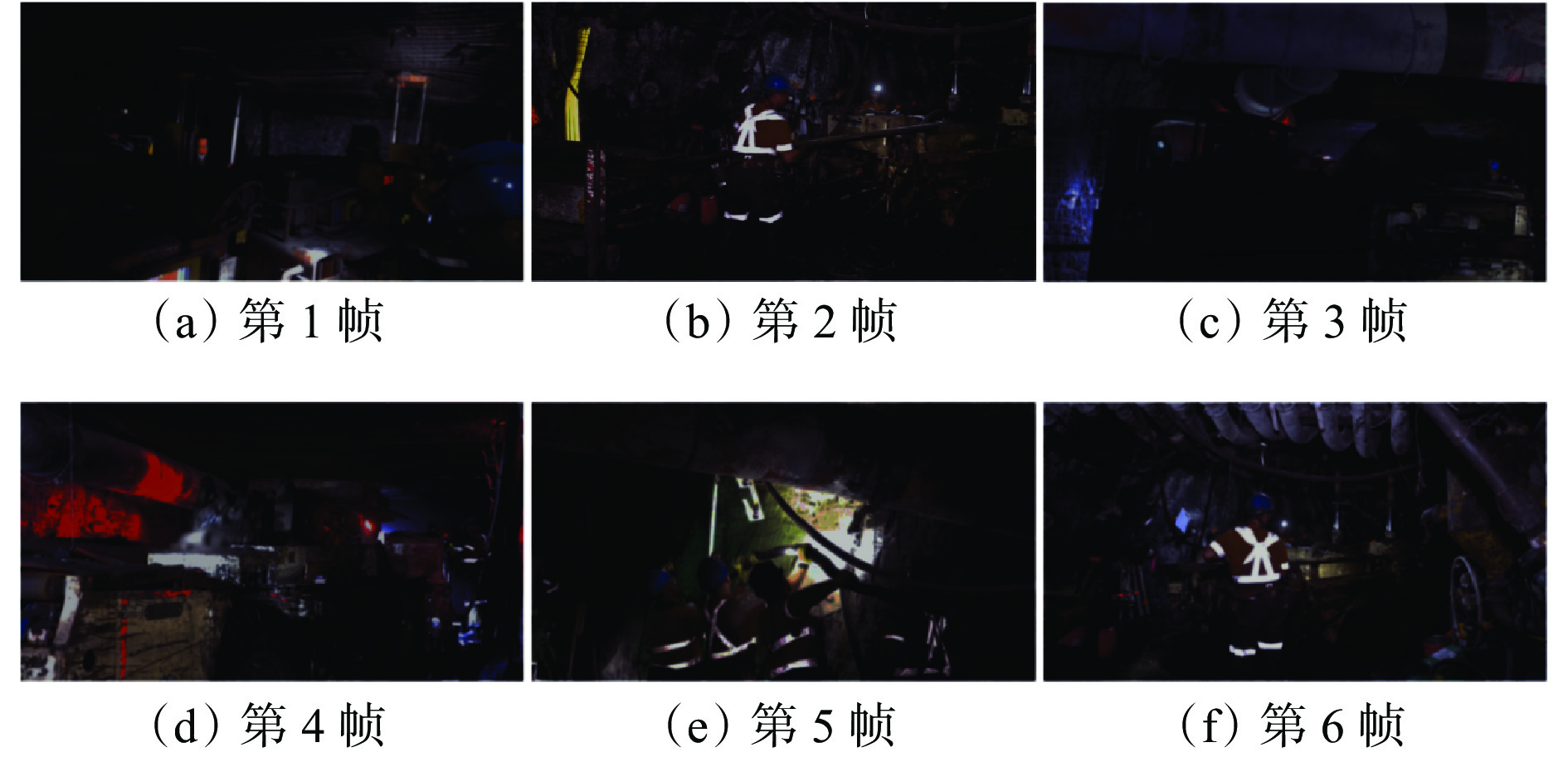
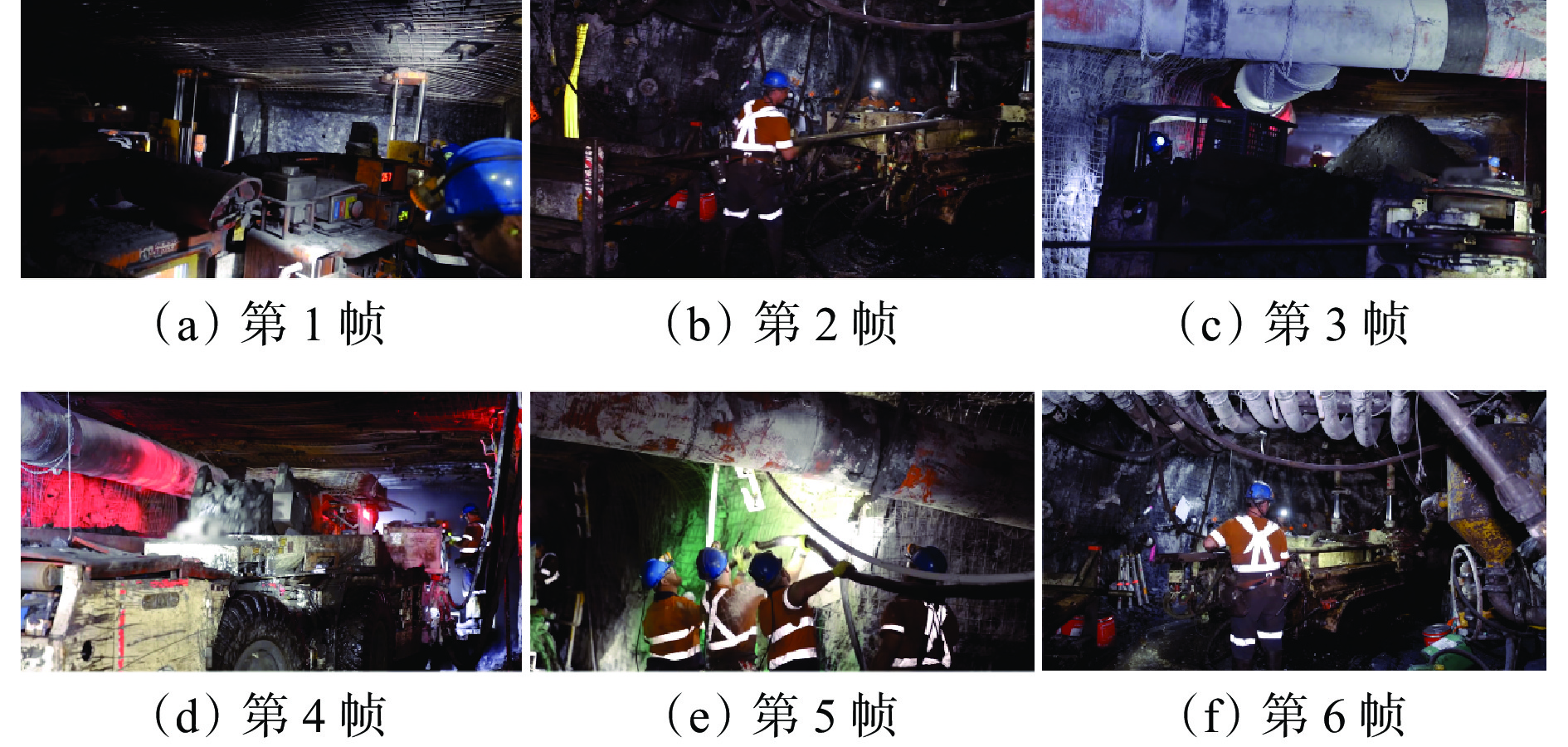
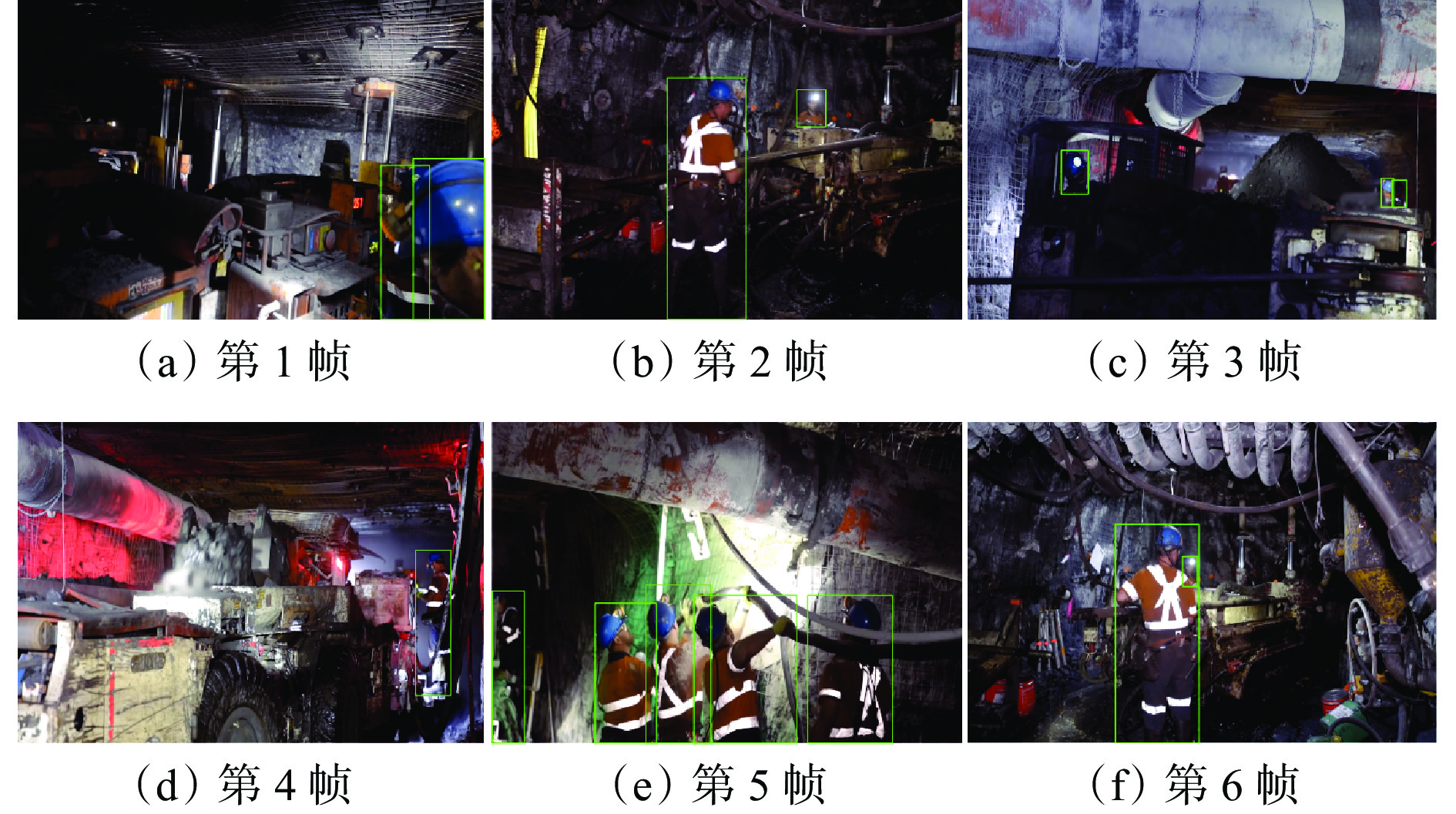
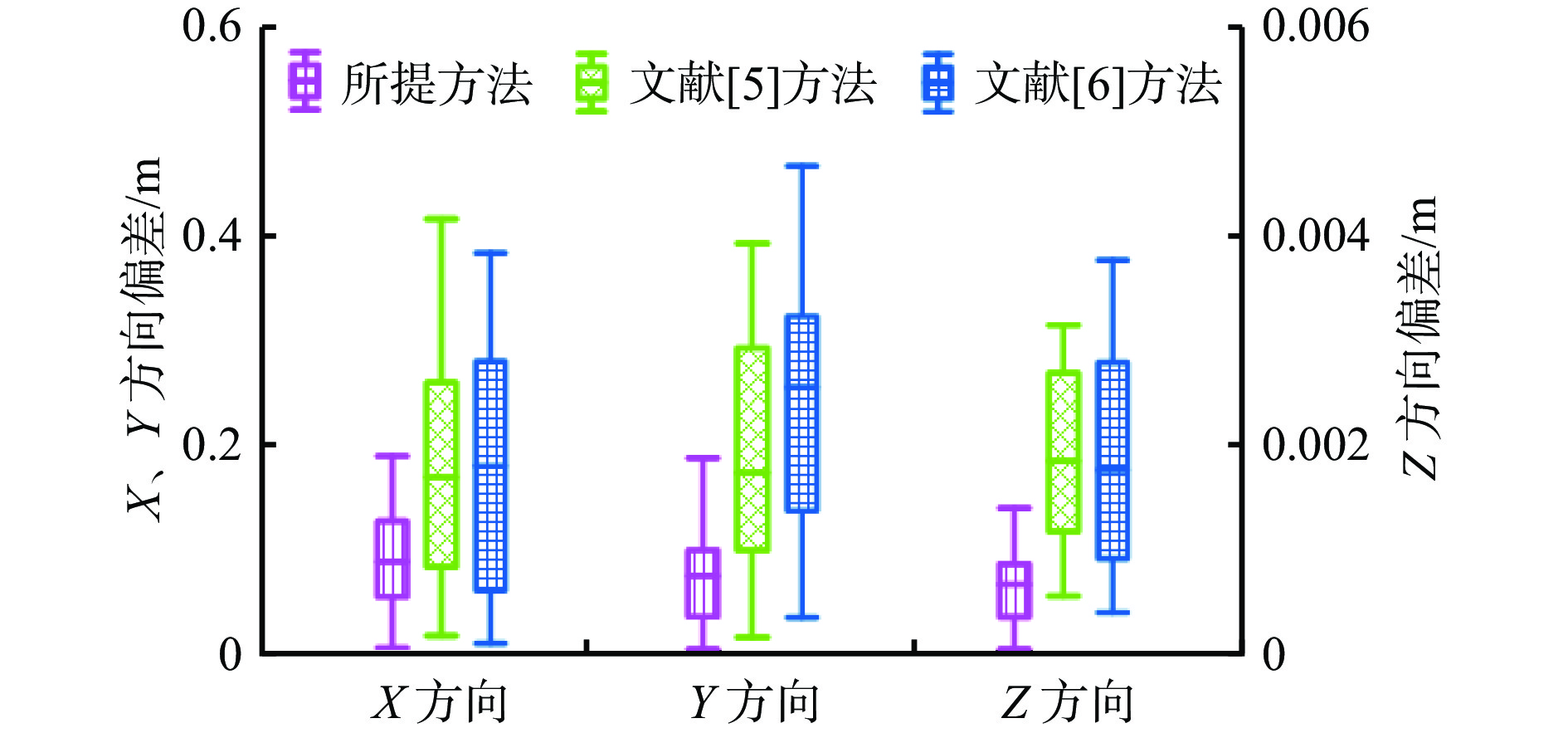
煤矿井下光照不足、粉尘遮挡,井下视频监控系统采集的人员目标在二维图像中表现为小目标或低可见度目标时,原始YOLOv3网络的Darknet53特征金字塔结构无法充分提取和保留目标的细节信息,导致定位结果不准确。针对上述问题,提出一种低可见度环境下基于改进YOLOv3的井下人员定位方法。首先,结合β函数映射和帧间信息增强技术,提升低可见度环境下煤矿井下监控视频的清晰度。然后,采用更轻量级的Darknet-19替代YOLOv3中的Darknet53,并引入CIoU作为YOLOv3的损失函数,利用改进YOLOv3识别增强后视频中的井下人员目标。最后,基于映射模型将识别到的目标从二维空间投影至三维空间,结合三维定位结果完成井下人员定位。选用某煤矿一段低可见度环境下井下监控视频进行实验,结果表明:① 经过基于改进YOLOv3的井下人员定位方法处理后的视频帧亮度、可见度和各项评价指标(平均灰度、平均对比度、信息熵与灰度谱带宽)较原始视频均有明显提升,整体光照条件得到显著改善,且处理后的视频帧对比度得到增强,目标和背景之间更易区分,说明采用的图像增强技术的有效性。② 改进YOLOv3模型准确地识别出视频帧中的井下工作人员,不存在漏识别问题。③ 采用已知位置的标定物或人工标注的的真实三维位置作为基准,计算投影结果与真实位置之间的偏差(偏差计算涵盖X,Y,Z方向上的距离偏差),其中X方向和Y方向上的偏差均低于0.2 m,Z方向上的偏差低于0.002 m,表明构建的映射模型的映射效果和定位精度较高。
煤矿井下光照不足、粉尘遮挡,井下视频监控系统采集的人员目标在二维图像中表现为小目标或低可见度目标时,原始YOLOv3网络的Darknet53特征金字塔结构无法充分提取和保留目标的细节信息,导致定位结果不准确。针对上述问题,提出一种低可见度环境下基于改进YOLOv3的井下人员定位方法。首先,结合β函数映射和帧间信息增强技术,提升低可见度环境下煤矿井下监控视频的清晰度。然后,采用更轻量级的Darknet-19替代YOLOv3中的Darknet53,并引入CIoU作为YOLOv3的损失函数,利用改进YOLOv3识别增强后视频中的井下人员目标。最后,基于映射模型将识别到的目标从二维空间投影至三维空间,结合三维定位结果完成井下人员定位。选用某煤矿一段低可见度环境下井下监控视频进行实验,结果表明:① 经过基于改进YOLOv3的井下人员定位方法处理后的视频帧亮度、可见度和各项评价指标(平均灰度、平均对比度、信息熵与灰度谱带宽)较原始视频均有明显提升,整体光照条件得到显著改善,且处理后的视频帧对比度得到增强,目标和背景之间更易区分,说明采用的图像增强技术的有效性。② 改进YOLOv3模型准确地识别出视频帧中的井下工作人员,不存在漏识别问题。③ 采用已知位置的标定物或人工标注的的真实三维位置作为基准,计算投影结果与真实位置之间的偏差(偏差计算涵盖X,Y,Z方向上的距离偏差),其中X方向和Y方向上的偏差均低于0.2 m,Z方向上的偏差低于0.002 m,表明构建的映射模型的映射效果和定位精度较高。


当前状态:
, 最新更新时间: ,
doi: 10.13272/j.issn.1671-251x.2024030058
摘要:
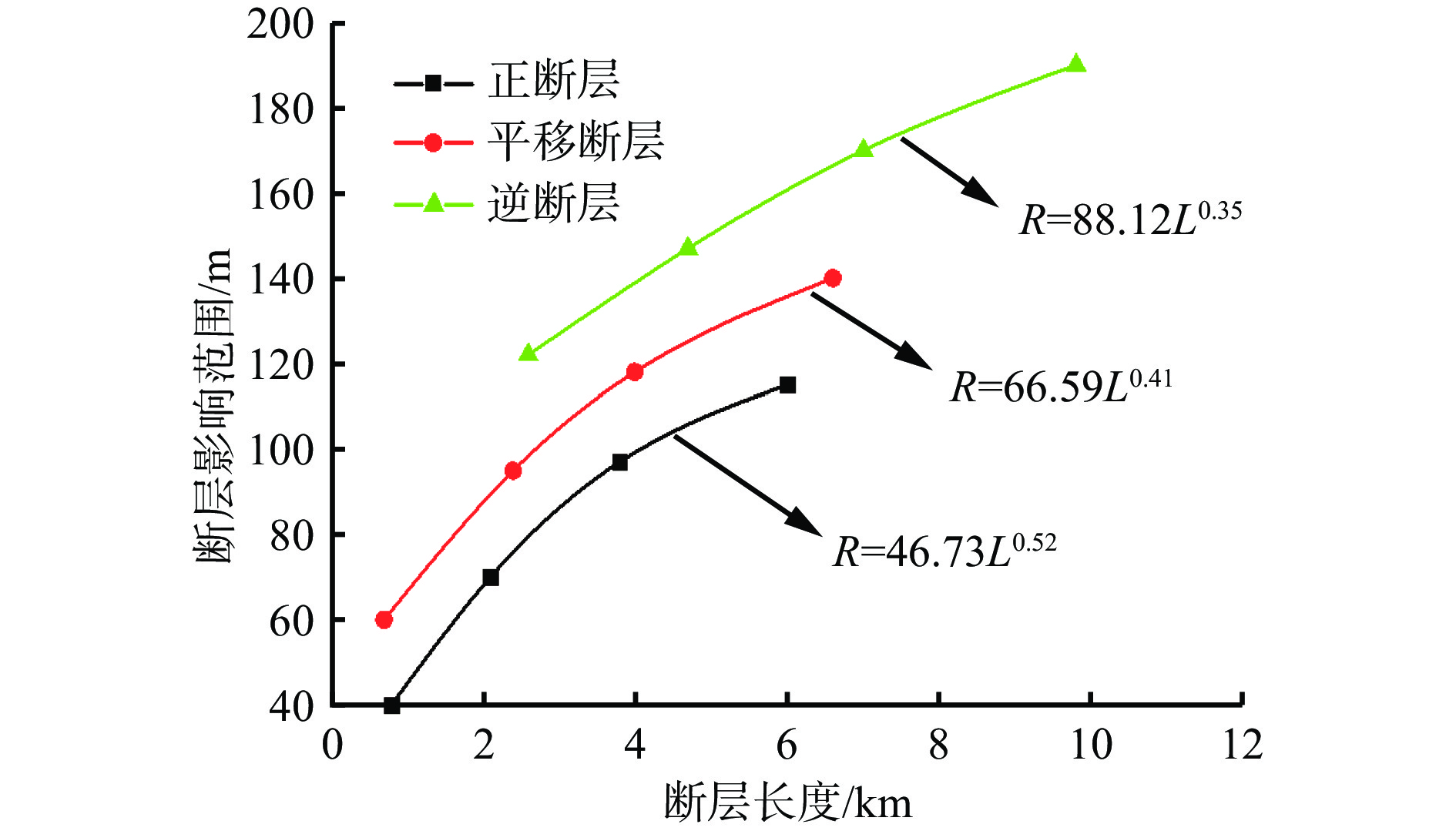
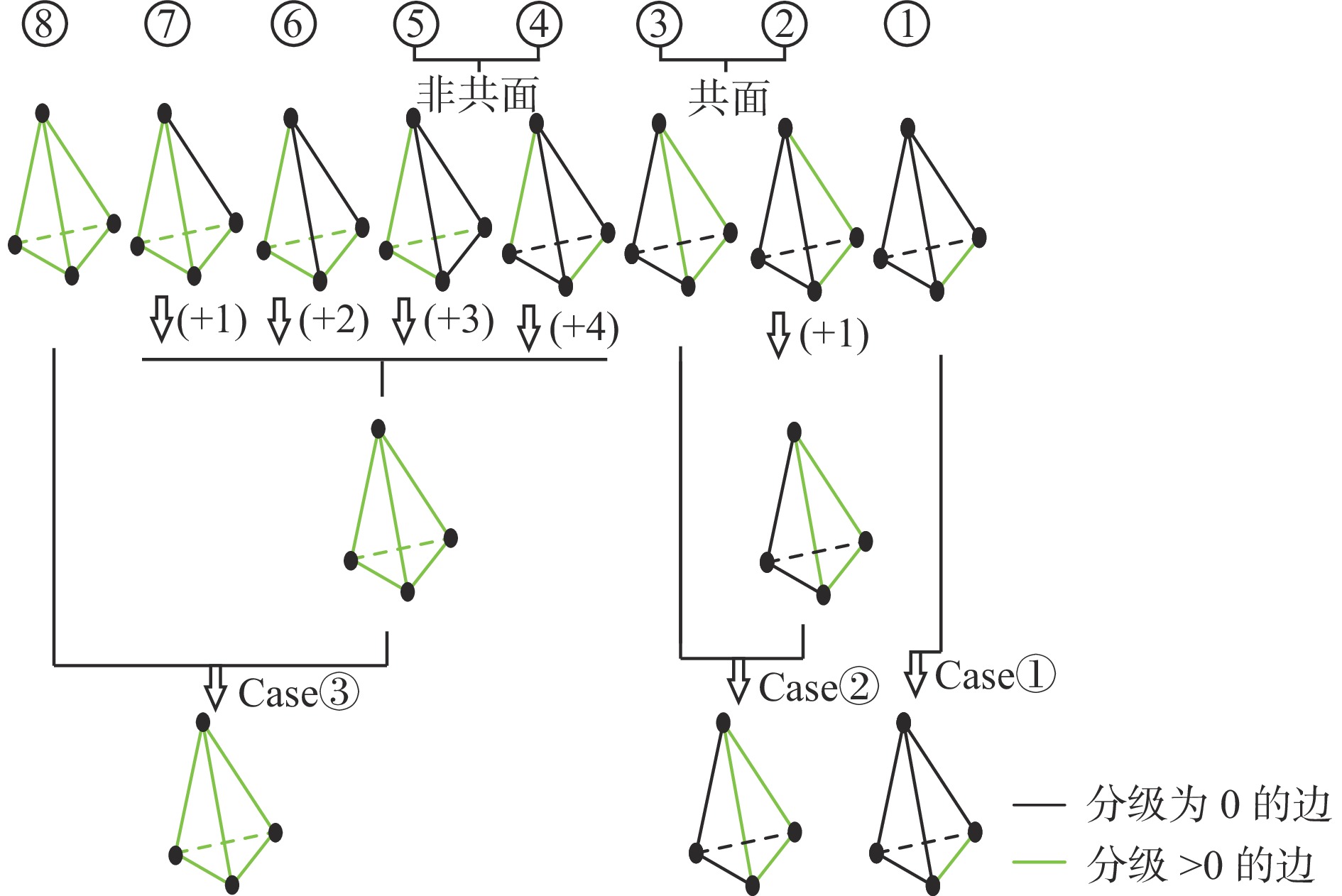
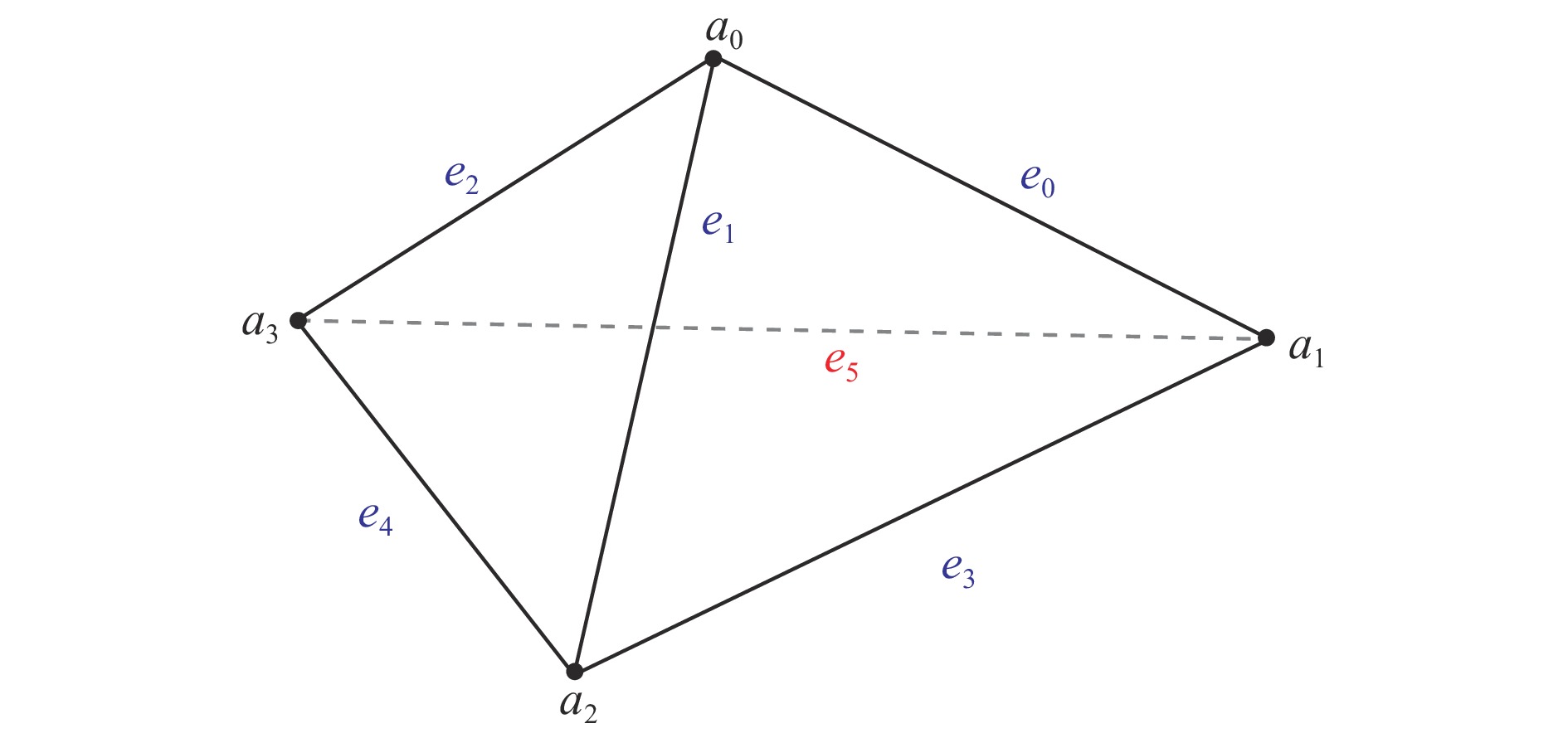
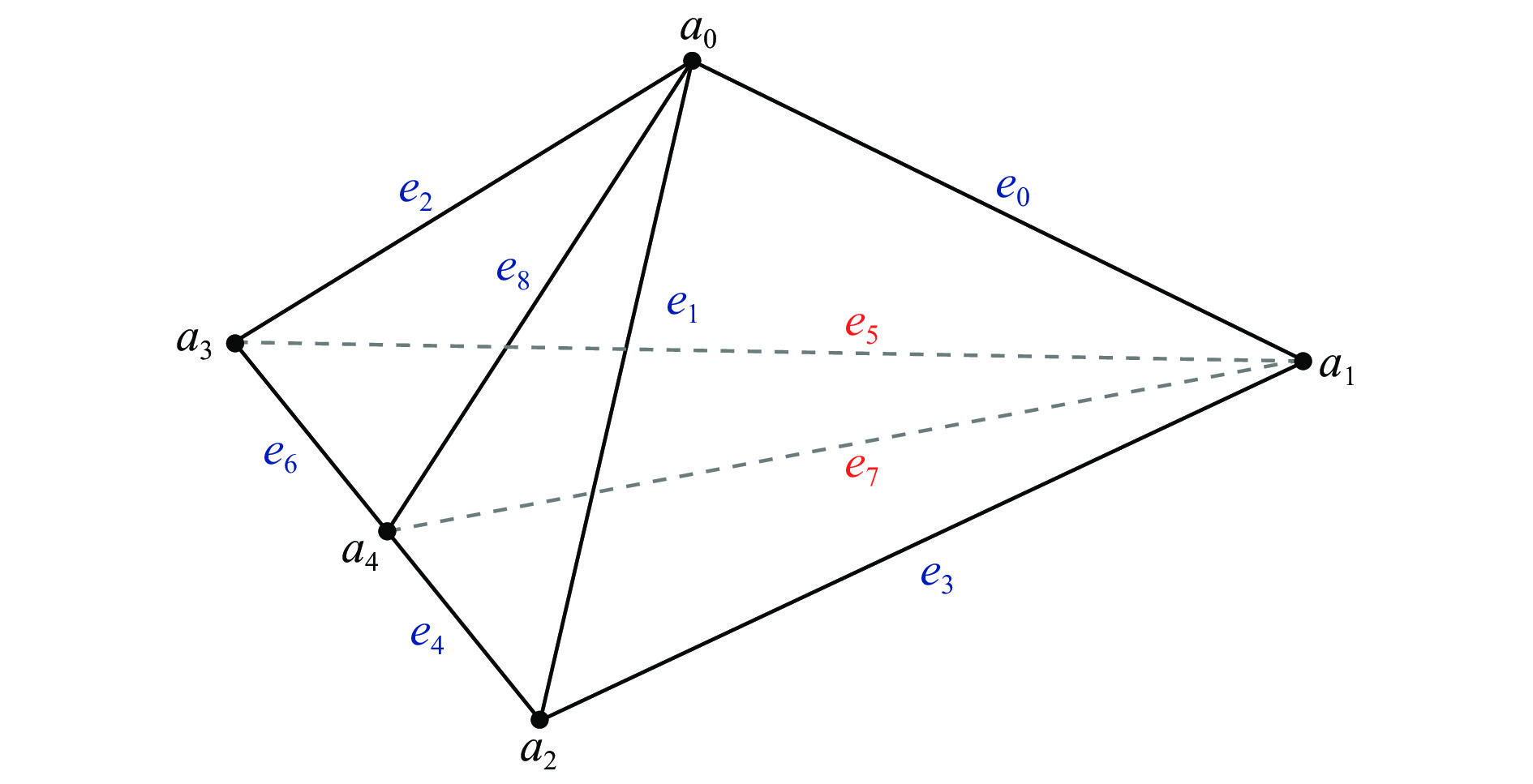
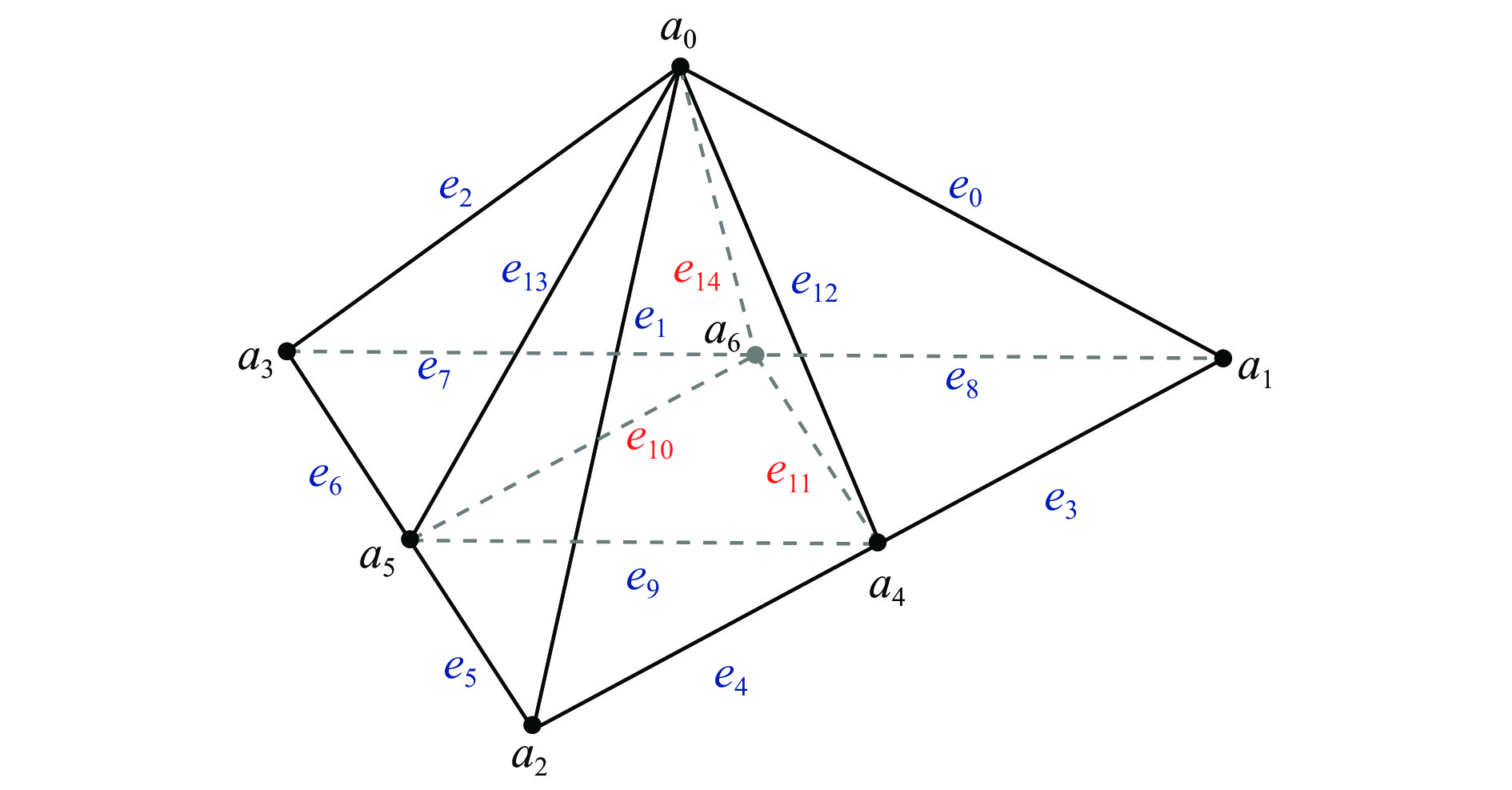
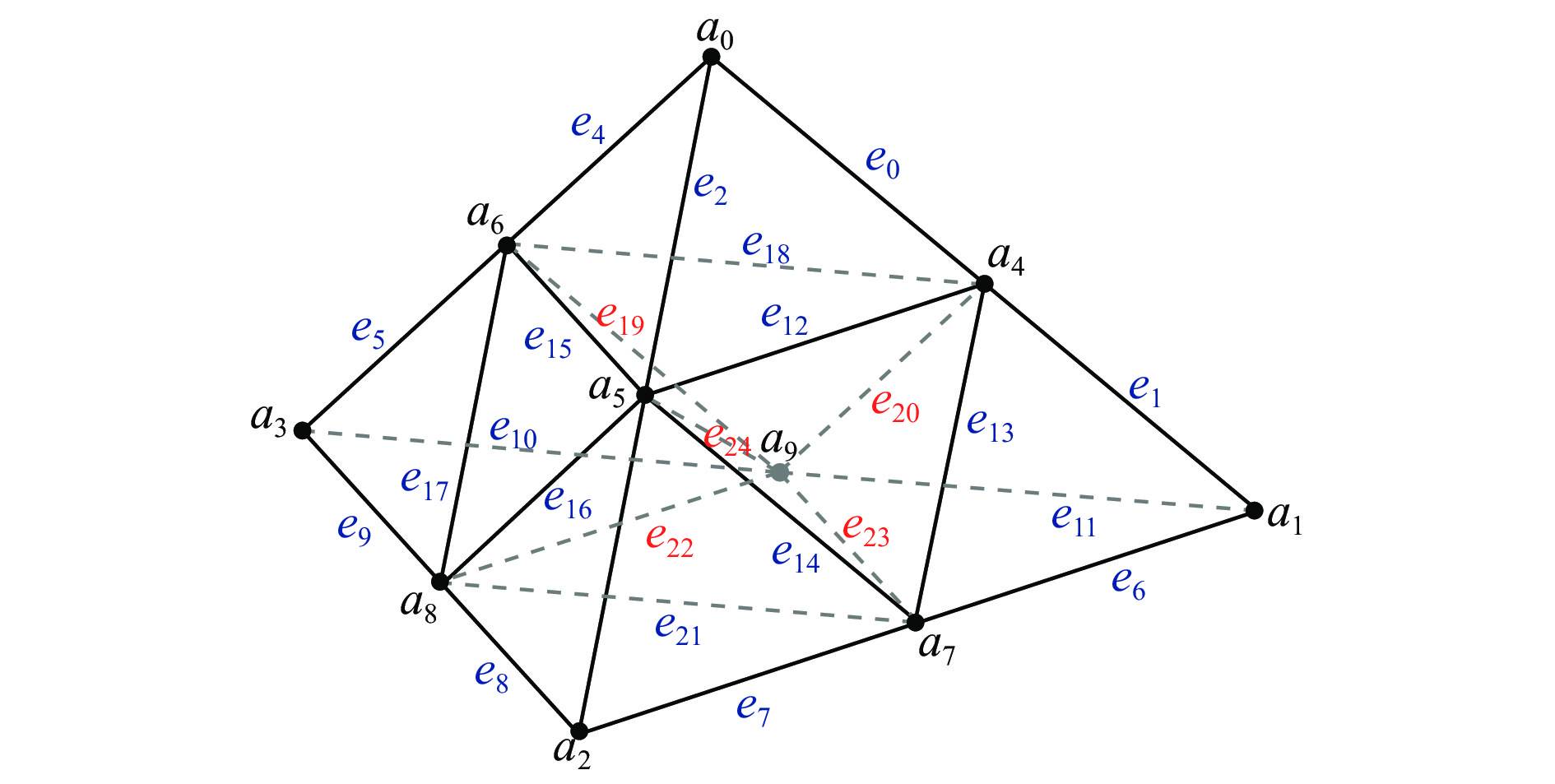
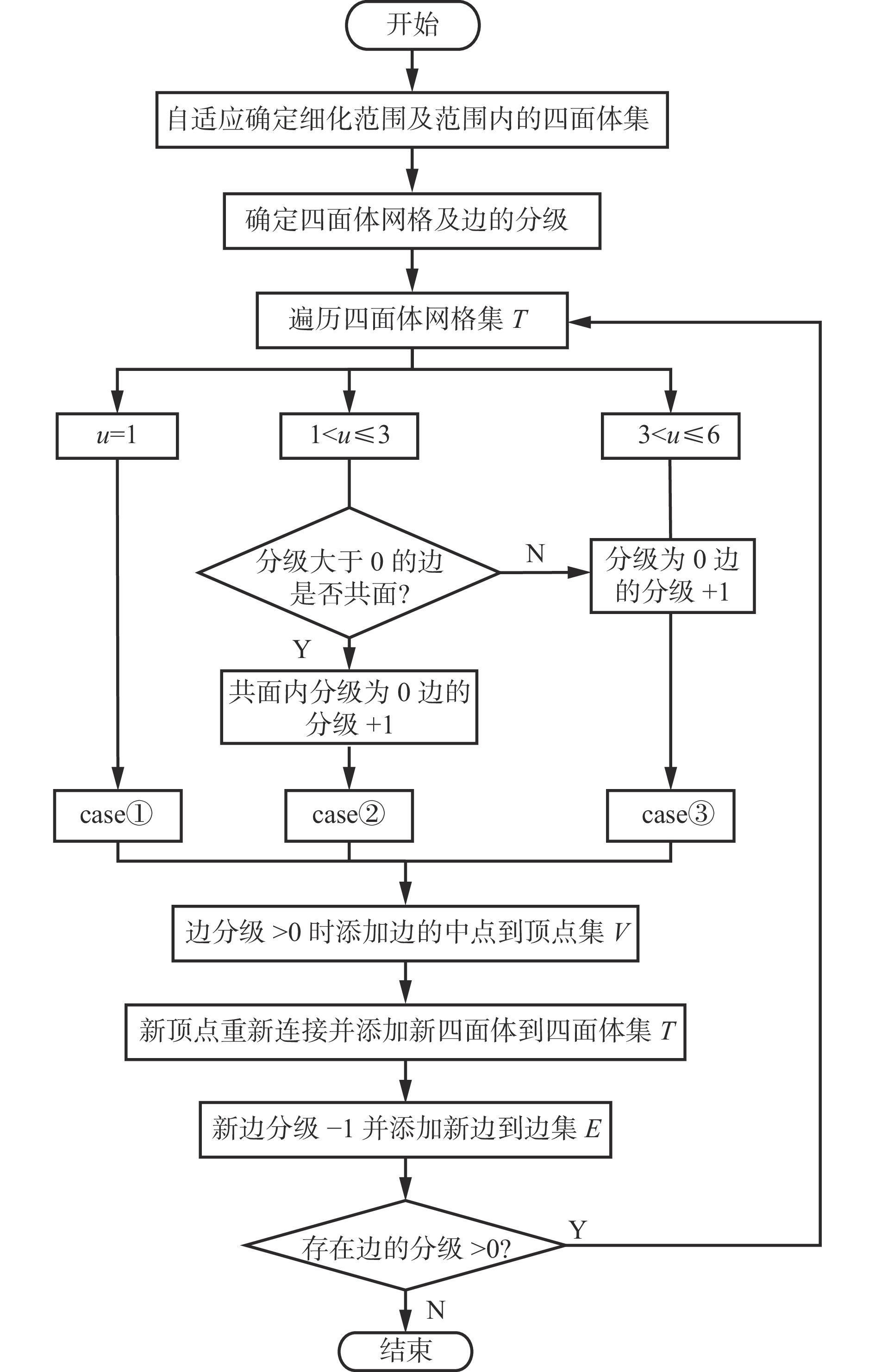
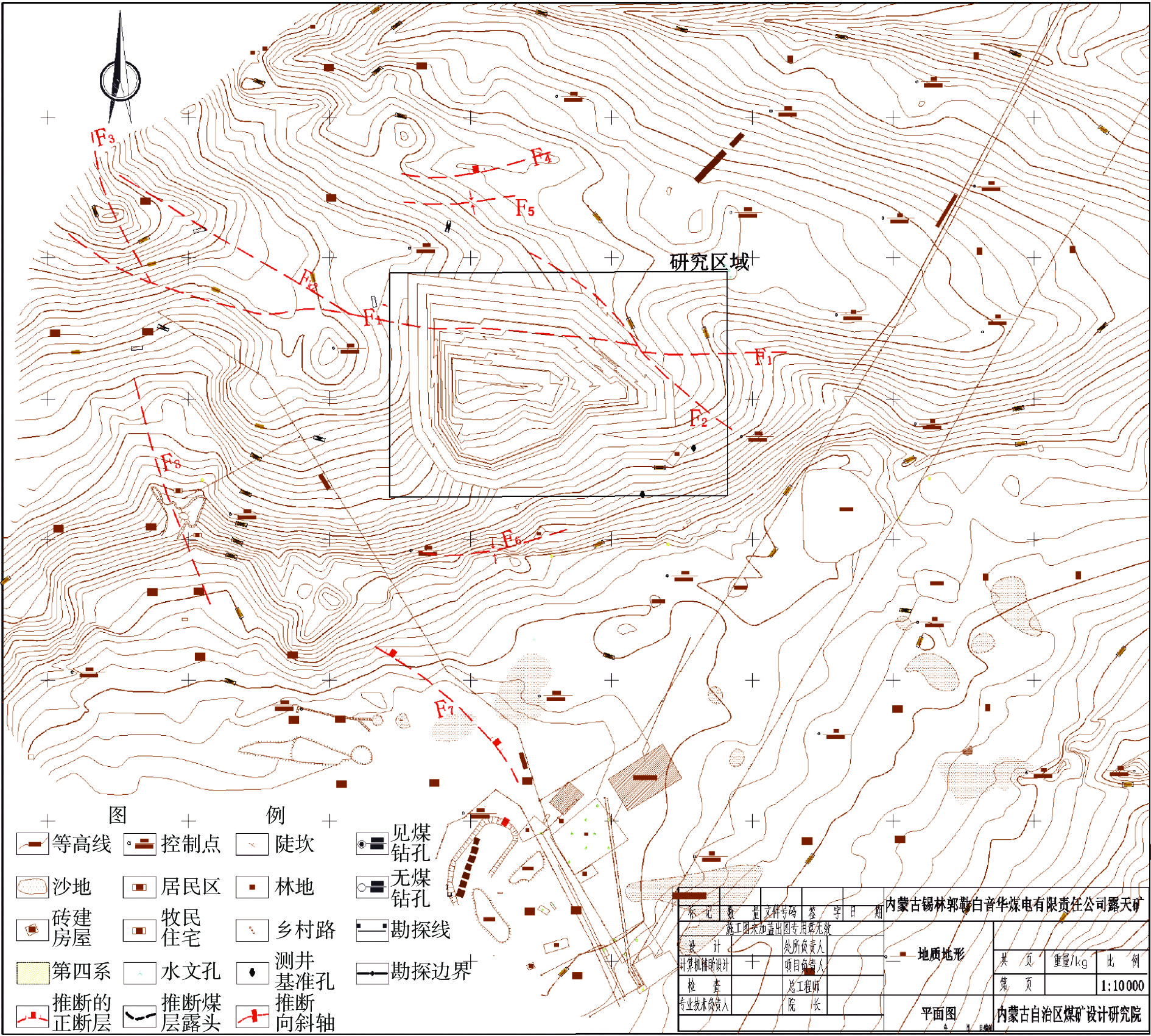
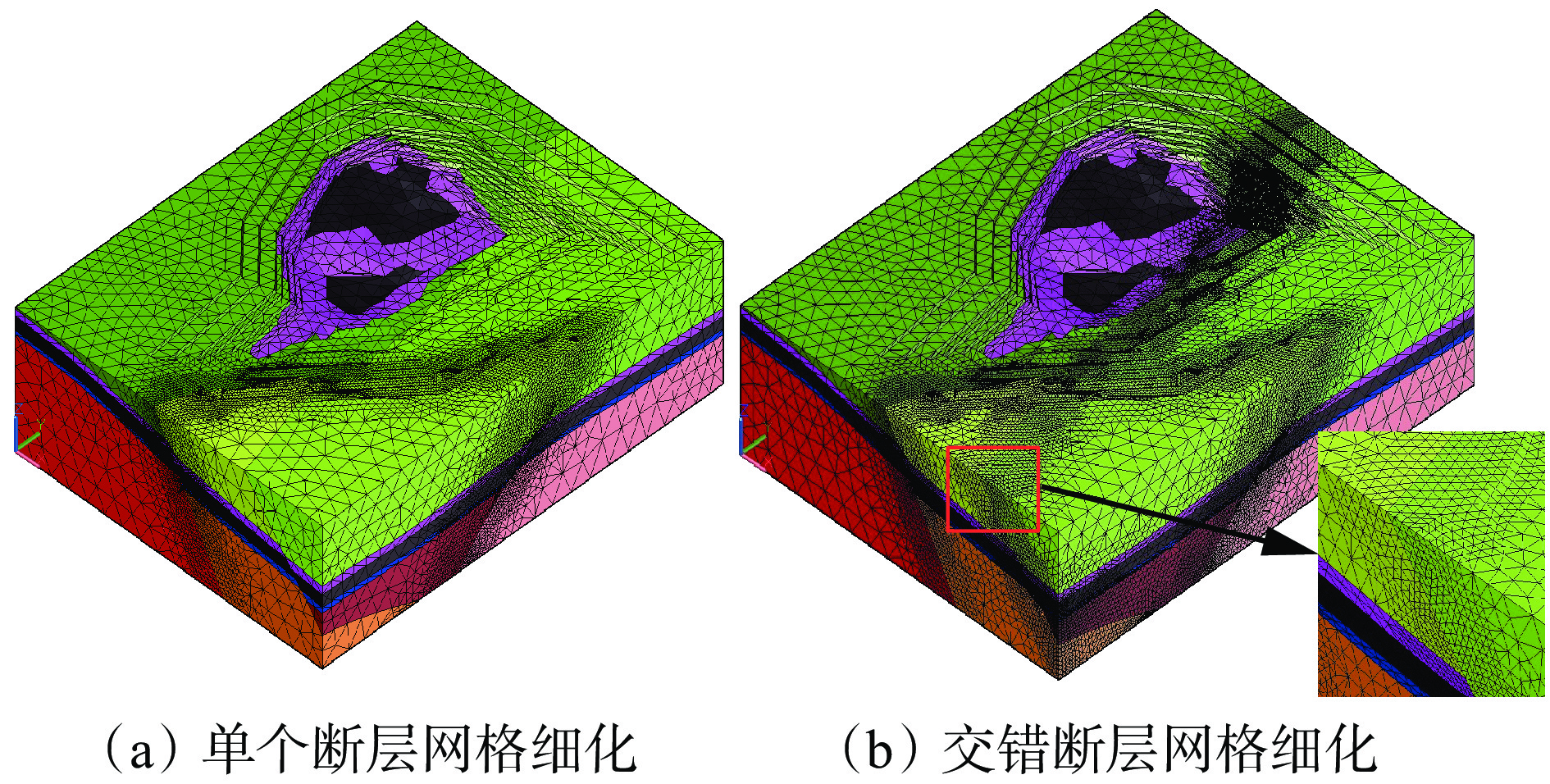
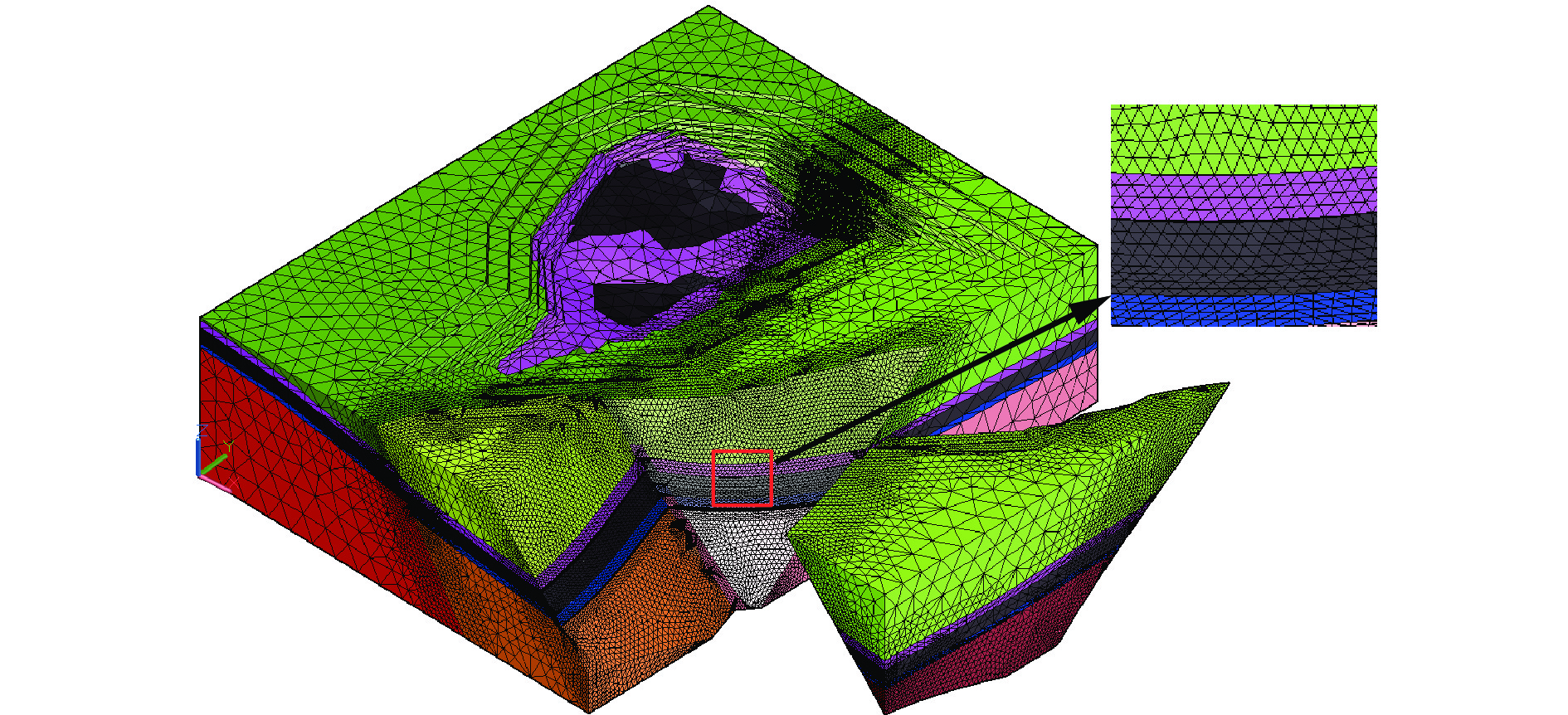
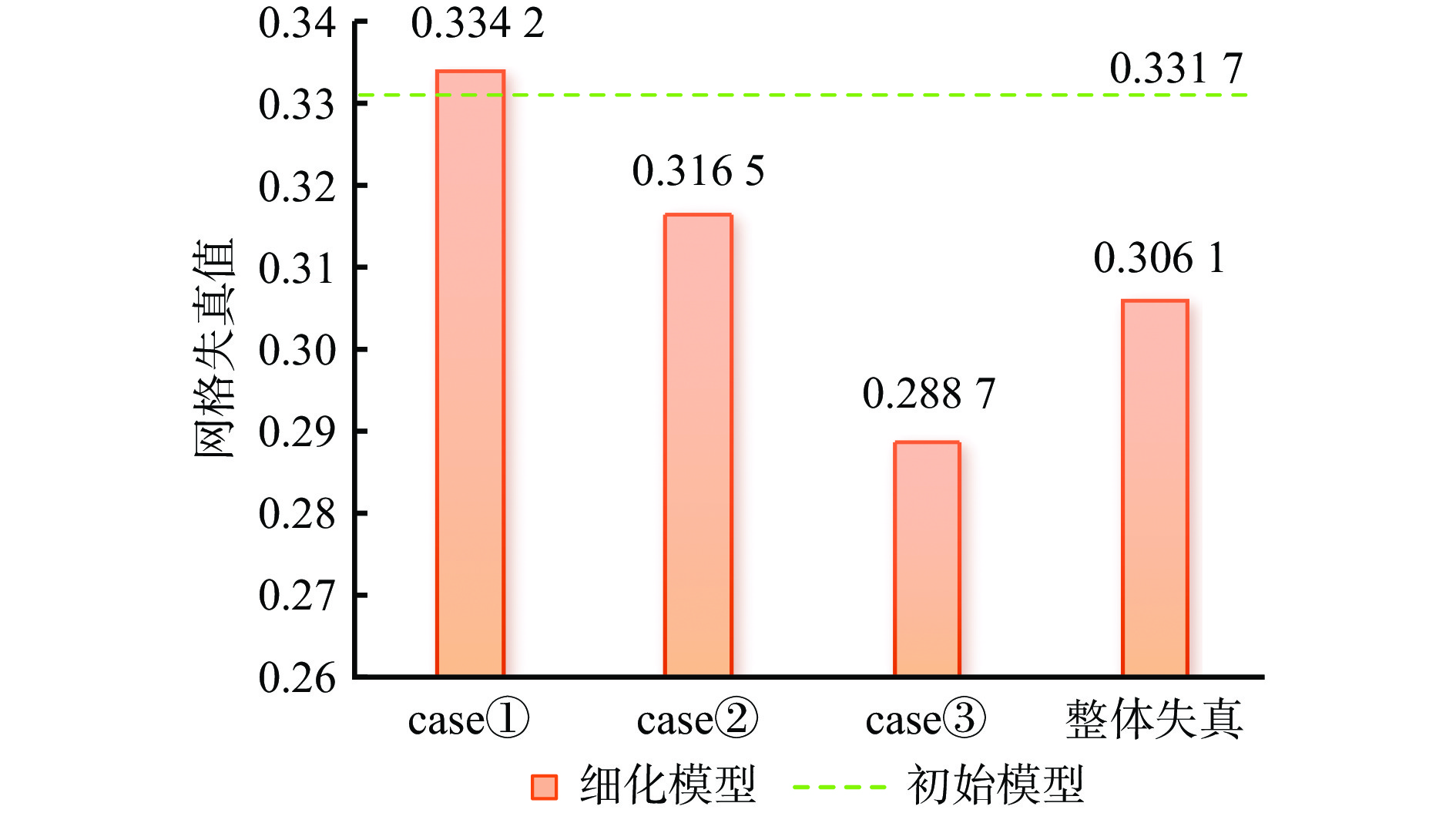
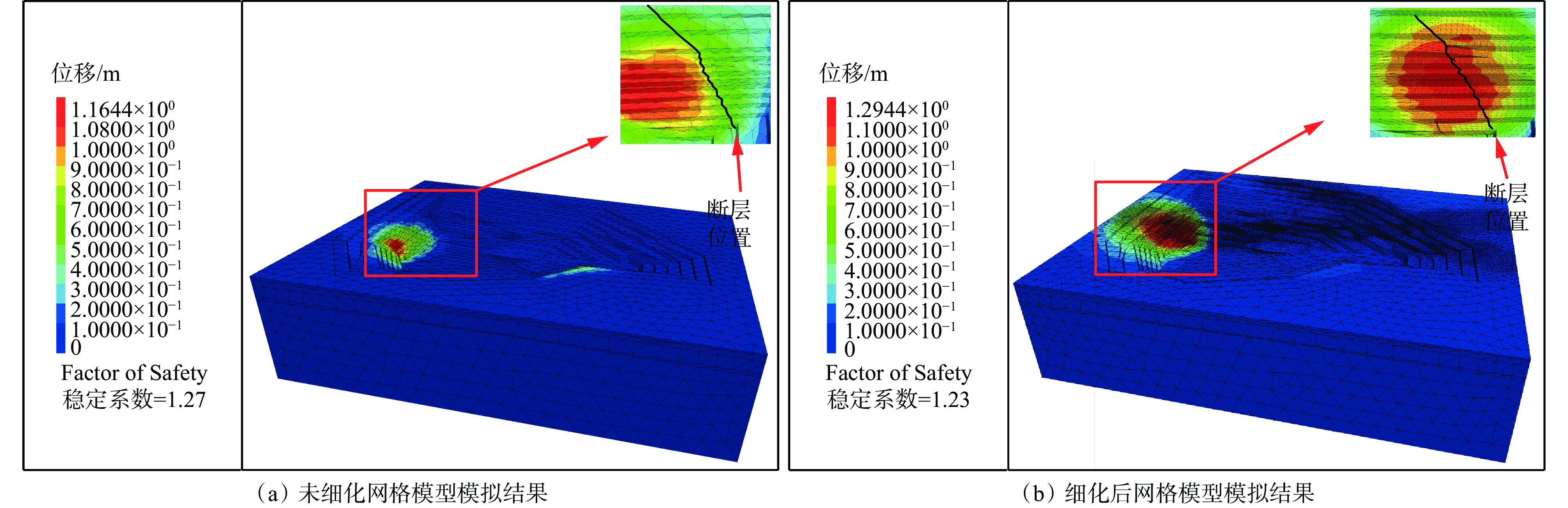
目前四面体自适应网格细化技术多集中于简单层状地质体的三维重构与表达分析,对于结构复杂、数据不连续的含交错断层等复杂地质体进行自适应网格细化时易出现过度细化导致断层区域的网格结构受到影响的问题。为了提高含复杂断层四面体网格模型的精度,提出一种适用于交错断层四面体自适应网格分级细化的方法。首先,根据断层影响范围公式,自适应确定断层网格附近的细化范围;其次,构建四面体和四面体边的分级细分公式,确定细化范围内的四面体和四面体边的分级;然后,针对四面体网格细分时出现的多种情况,通过对边的升级处理,将细分的8种类型统一为3种类型;最后,在细化范围内,通过新增加顶点和原顶点重新连接四面体,改变网格的单元尺寸,生成高质量的网格模型。以内蒙古自治区某含交错断层露天煤矿的四面体网格模型为例,使用3维网格质量评估算法及FLAC3D模拟软件分析细化前后的网格模型,结果表明:细化后的网格模型失真值从0.331 7降低到0.306 1,表明网格的质量得到提升;在相同参数下,未细化模型的最大位移为1.16 m,稳定性系数为1.27,分级细化后模型的最大位移为1.29 m,稳定性系数为1.23;细化后模型的位移云图处于断层处,且能够体现断层分布特征和断层对边坡的影响规律,而未细化模型的位移云图的位置偏离断层中心,断层对边坡的影响效果不明显。
目前四面体自适应网格细化技术多集中于简单层状地质体的三维重构与表达分析,对于结构复杂、数据不连续的含交错断层等复杂地质体进行自适应网格细化时易出现过度细化导致断层区域的网格结构受到影响的问题。为了提高含复杂断层四面体网格模型的精度,提出一种适用于交错断层四面体自适应网格分级细化的方法。首先,根据断层影响范围公式,自适应确定断层网格附近的细化范围;其次,构建四面体和四面体边的分级细分公式,确定细化范围内的四面体和四面体边的分级;然后,针对四面体网格细分时出现的多种情况,通过对边的升级处理,将细分的8种类型统一为3种类型;最后,在细化范围内,通过新增加顶点和原顶点重新连接四面体,改变网格的单元尺寸,生成高质量的网格模型。以内蒙古自治区某含交错断层露天煤矿的四面体网格模型为例,使用3维网格质量评估算法及FLAC3D模拟软件分析细化前后的网格模型,结果表明:细化后的网格模型失真值从0.331 7降低到0.306 1,表明网格的质量得到提升;在相同参数下,未细化模型的最大位移为1.16 m,稳定性系数为1.27,分级细化后模型的最大位移为1.29 m,稳定性系数为1.23;细化后模型的位移云图处于断层处,且能够体现断层分布特征和断层对边坡的影响规律,而未细化模型的位移云图的位置偏离断层中心,断层对边坡的影响效果不明显。



2024, 50(8): 1-13.
doi: 10.13272/j.issn.1671-251x.2024070063
摘要: 为进一步提高采煤工作面的智能化水平,实现采煤机导航截割的自主推演、自主学习和自主优化,基于采煤机自主导航截割技术和数字孪生智采工作面的概念,提出了采煤机数字孪生导航截割运动规划的理论与方法,包括数字孪生理论及基于该理论的采煤机数字孪生导航截割运动规划系统的构建方法。围绕数字孪生理论,探索了智采工作面的物理场景、数字孪生模型的构建及数字孪生驱动、交互和演化机制。为满足不同应用需求,将数字孪生模型分为物理实体、孪生模型和孪生数据模型,详细分析了这3类模型的特点。介绍了由模型驱动、数据驱动和服务驱动组成的3种运行机制,这3种机制通过虚实交互逻辑实现了从感知智能到认知智能的转变。构建了采煤机数字孪生导航截割运动规划系统,该系统通过物理感知层、综合数据层、数据融合分析层及数字孪生服务层,支撑采煤机截割状态数字孪生、动态导航地图数字孪生、数字孪生强化学习环境和强化学习运动规划的服务功能;通过数字化手段将现实中的采煤机导航截割过程复制到数字孪生操作环境中,通过系统内各模块的调用实现数据的自适应融合、智能分析和最优规划。最后,在构建的数字孪生环境中比较深度Q网络−归一化优势函数(DQN−NAF)算法与深度确定性策略梯度(DDPG)算法在采煤机运动规划任务中的效果,结果表明DQN−NAF算法在解决采煤机数字孪生运动规划任务时展现出更优的效果和稳定性。
2024, 50(8): 14-19.
doi: 10.13272/j.issn.1671-251x.2024070023
摘要: 针对基于惯性测量单元的液压支架姿态解算方法会产生累计误差、校正结果不准确的问题,提出一种基于粒子群优化(PSO)−极限学习机(ELM)的综采工作面液压支架姿态监测方法。以液压支架顶梁俯仰角为监测对象,采用倾角传感器和陀螺仪采集液压支架顶梁支护姿态实时信息,对采集到的数据进行预处理,将处理后的数据输入PSO−ELM误差补偿模型中,得到解算误差预测值;同时通过卡尔曼滤波融合进行液压支架姿态解算,得到解算值;再用误差预测值对解算值进行误差补偿,从而求得更加准确的顶梁支护姿态数据。该方法只考虑加速度和角速度数据与解算误差的关系,不依赖具体的物理模型,可有效降低姿态解算累计误差。实验结果表明:液压支架顶梁俯仰角平均绝对误差由补偿前的1.420 8°减少到0.058 0°,且误差曲线具有良好的收敛性,验证了所提方法可持续稳定地监测液压支架的支护姿态。
2024, 50(8): 20-29.
doi: 10.13272/j.issn.1671-251x.2024060046
摘要: 综采工作面液压支架工作中常存在支架初撑力不足、移架速度慢等问题,目前大多基于支架液压系统的稳态运行规律,采用增大泵站流量、降低压力损失等方案来解决,对液压系统动态特性的研究较少。建立了综采支架液压系统动力方程,理论分析了支架初撑力和移架速度相关的液压系统动态特性和乳化液管路系统的液压冲击特性,得出立柱或千斤顶的近似空载运行和长距离管路液压冲击是造成支架液压系统压力大幅下降波动的主要原因。揭示了支架液压系统液压冲击的发生机理为电液换向阀突然启闭和立柱触顶加压。通过现场实测数据和AMESim仿真验证了理论分析的正确性。提出了综采支架液压系统改进方案,在支架上设置多个蓄能器,新增液控单向阀和电液换向阀控制液压系统蓄能器在不同移架阶段的充放液方式,利用蓄能器的瞬时大流量特性和长距离管路液压冲击压力峰值产生的超压作用来提升支架初撑力。仿真结果表明,改进系统能够有效提高液压支架的初撑力和移架速度。
2024, 50(8): 30-37.
doi: 10.13272/j.issn.1671-251x.2024060060
摘要: 针对现有工作面周期来压预测方法精度不足、泛化性较差和算力要求高等问题,提出了一种基于动态自适应旗鱼优化BP神经网络(DASFO−BP)的工作面周期来压预测模型。通过分析工作面周期来压机理,得到与来压相关的影响因素,通过皮尔逊相关系数确定对来压具有显著影响的因素(推进速度、直接顶厚度、基本顶厚度、采高、煤层倾角和倾向长度)作为预测模型输入,并以下次来压强度和来压步距作为预测模型输出。针对旗鱼优化(SFO)算法鲁棒性不足的问题,提出了动态自适应优化策略对SFO算法进行改进,即在优化前期利用SFO达到快速收敛的目的,中期则借助秃鹰搜索(BES)跳出局部最优,后期发挥粒子群优化(PSO)深度搜索的优势来提高解的精度。通过改进后的动态自适应旗鱼优化(DASFO)算法对BP神经网络的超参数进行训练,构建了基于DASFO−BP的来压预测模型。实验结果表明:DASFO算法在单峰和多峰测试函数上均能实现快速收敛;与BP,SFO−BP和NCPSO−BP相比,DASFO−BP对周期来压强度和步距的预测值与真实值更为接近,具有更高的精度,拟合能力和泛化能力强,能够准确预测下一周期来压分布情况。
2024, 50(8): 38-43, 68.
doi: 10.13272/j.issn.1671-251x.2024040048
摘要: 当前应用于煤岩图像识别的深度卷积神经网络模型存在体积庞大、计算过程冗杂等问题,难以满足实时检测要求,且对低照度、高粉尘等复杂环境适应性差。针对上述问题,提出了一种融合钻孔地质信息的煤岩图像识别方法。首先,通过改进的谱残差显著性检测(ISRSD)算法增强煤岩图像质量,有效减弱复杂环境对煤岩图像特征造成的不利影响;然后,使用加入注意力机制的VGG(AVGG)深度卷积神经网络模型——在VGG的基础上进行剪枝、加入卷积注意力模块(CBAM)和引入自适应学习率调整策略,高效提取煤岩图像特征;最后,利用贝叶斯模型融合煤岩图像特征和由钻孔地质柱状图获取的钻孔地质信息,提升煤岩分类的准确性和鲁棒性。实验结果表明,经ISRSD算法增强后的图像目标更突出,色彩失真程度更低,且边缘、纹理等图像特征保留相对完整; AVGG模型的准确率与VGG模型相当,但平均推理时间、参数量及模型大小分别仅为VGG模型的15.61%,33.44%及33.40%;与仅使用AVGG模型识别煤岩图像相比,利用贝叶斯模型融合钻孔地质信息后,准确率提高了1.85%,达97.31%。
2024, 50(8): 44-51.
doi: 10.13272/j.issn.1671-251x.2024050043
摘要: 针对重复采动巷道围岩变形严重、无法复用,重复采动巷道在服务期内具有明显的叠加演化特征的问题,以关家崖煤矿13092巷道为研究背景,采用现场实测、数值模拟和理论分析的方法,对重复采动巷道变形的叠加扩展特征和控制对策进行了研究。重复采动巷道变形特征分析结果表明:① 一次回采扰动下,重复采动巷道变形呈现分区和非对称破坏特征,可划分为快速变形区、强烈变形区和缓慢变形区;裂纹破坏主要在煤壁帮和煤柱帮,而顶底板较少,表现为巷道两帮显著片帮和内移;煤壁帮与顶板、煤柱帮与底板交汇处变形严重。② 二次采动巷道在一次破坏基础上叠加扩展,使得非对称破坏更加显著,形成巷道围岩蝶形叠加塑性破坏区。③ 重复采动巷道围岩控制的重点时间为一次回采阶段,重点区域为强烈变形区和缓慢变形区的巷道煤柱帮一侧。通过分析采动巷道蝶形变形特征和破坏分区规律,提出了重复采动巷道多层次耦合控制技术,采用浅低压−深高压注浆提高煤柱支撑力,采用锚索补强提高支护体支撑力,实现耦合控制。通过加固前后变形量对比分析验证了多层次耦合控制满足巷道复用要求。
2024, 50(8): 52-60.
doi: 10.13272/j.issn.1671-251x.2024060090
摘要: 针对煤矿井下巷道大断面硐室的围岩变形破坏问题,以乌兰木伦煤矿井下分选及充填大断面硐室为研究对象,采用相似模拟实验方法,进行单调递增加载和恒定荷载加载单轴压缩实验,对大断面硐室围岩变形破坏规律进行了研究。结果表明:① 2种加载方式在压密阶段、弹性变形阶段及微破裂稳定发展阶段破坏演化和变形位移趋势相似。② 采用单调递增加载方式的试样裂纹较少但裂纹缝隙较大,试样沿着主裂纹突然发生破断,期间有大量碎屑飞出,试样变形位置主要集中在围岩边界,破坏时释放能量较多,但峰后释放能量持续时间较短。③ 采用恒定荷载加载方式的试样应力保持不变,应变缓慢增加,期间产生大量微小裂纹,试样变形位置主要围绕在硐室周围,破坏时释放能量较少,但峰后释放能量持续时间较长。依据大断面硐室围岩变形破坏规律,提出了锚杆索支护方案:硐室顶部打长锚索,将顶板和上方坚硬岩石连成整体;在硐室煤岩交界处打倾斜锚杆,将煤岩交界面与周围岩体紧密连接。数值模拟结果表明,支护后围岩应力、位移、塑性区均明显减小,围岩稳定性大幅提高,支护效果良好。
2024, 50(8): 61-68.
doi: 10.13272/j.issn.1671-251x.2024060079
摘要: 近距离煤层上煤层工作面与下位煤层巷道采掘关系发生变化时,巷道围岩变形失稳机理会更加复杂,而目前针对上煤层工作面与下位煤层巷道推进方向不同时巷道受载动态演化规律及失稳特征的研究较少。以陕北能东煤矿近距离煤层为研究对象,采用理论分析、数值模拟与现场实测相结合的方法,对上煤层工作面回采后下位煤层巷道的稳定性进行了研究。理论分析得出,上煤层工作面开采后所产生的底板裂隙深度为22.5 m,未发育至下位煤层巷道。按采掘空间位置关系将回采工作面与巷道分为相向、相交、背向3个状态,数值模拟当巷道与工作面的空间位置关系发生变化时下位煤层巷道围岩的变形情况,结果表明:① 上煤层工作面与下位煤层巷道的采掘关系为相交与背向推进时,巷道围岩应力呈先增后减再增的趋势,在推进距离为90 m时,最大应力为6.5 MPa,应力集中系数为1.49,在推进距离为100~110 m时,巷道围岩应力降低幅度最大,降低了53.2%,在推进距离为150 m时应力最小,为0.95 MPa,之后不断增大,直到恢复至原岩应力。② 巷道围岩位移量在推进距离为100~150 m时增长幅度较大,在150 m时顶板位移量达到最大,为0.036 m,随着巷道越接近边界煤柱,其巷道位移量越小。现场实测结果表明:上煤层工作面过下位煤层巷道时,巷道位移量显著增长,顶板最大位移量为3.41 cm,与数值模拟结果一致;相交推进过程中若地质条件简单可以适当加快推进速度,减小上煤层工作面开采对下位煤层巷道的影响。


