
Design and experimental research on the rocker arm walking mechanism of the wheeled inspection robot for the main transportation roadway of coal mines
-
摘要:
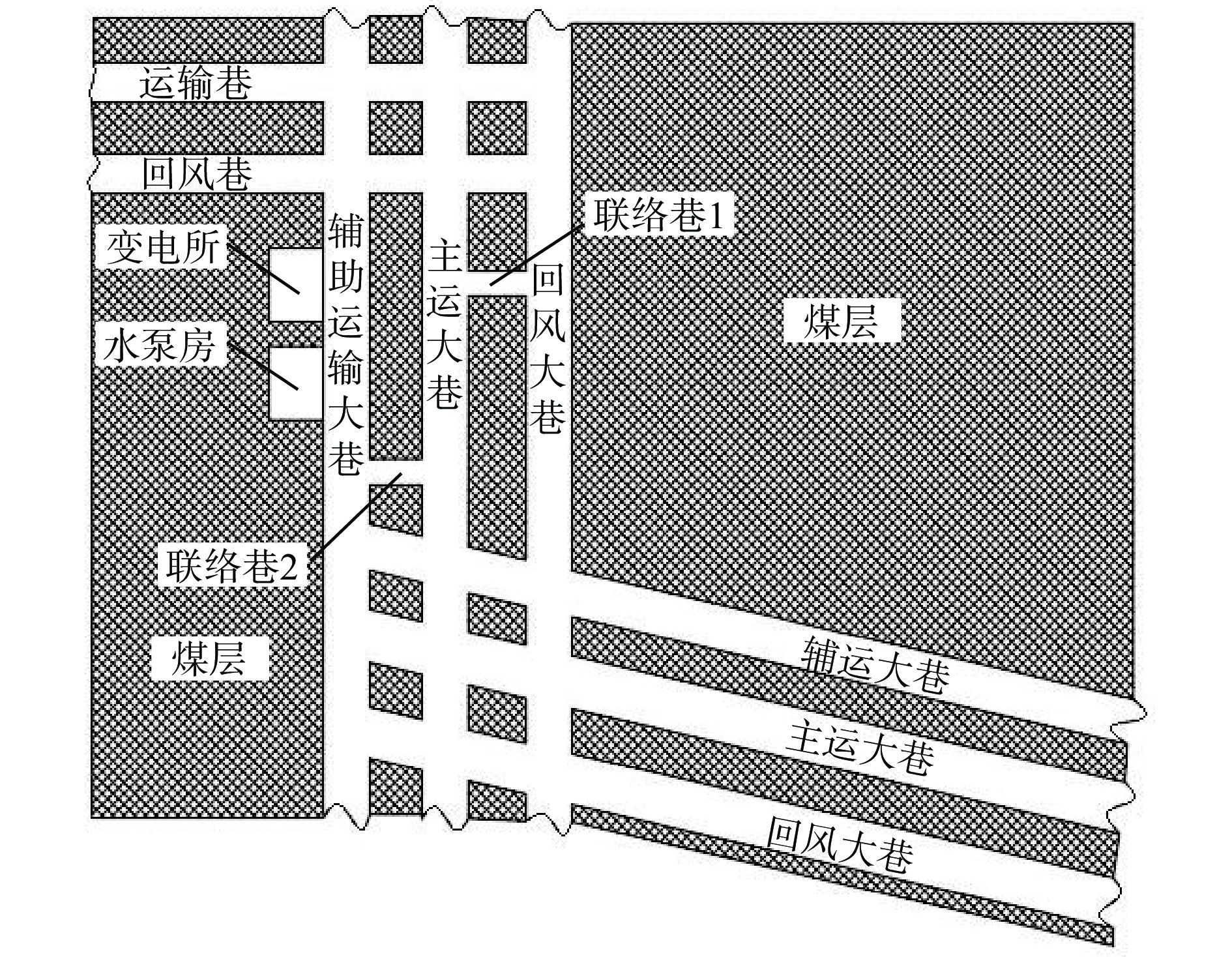
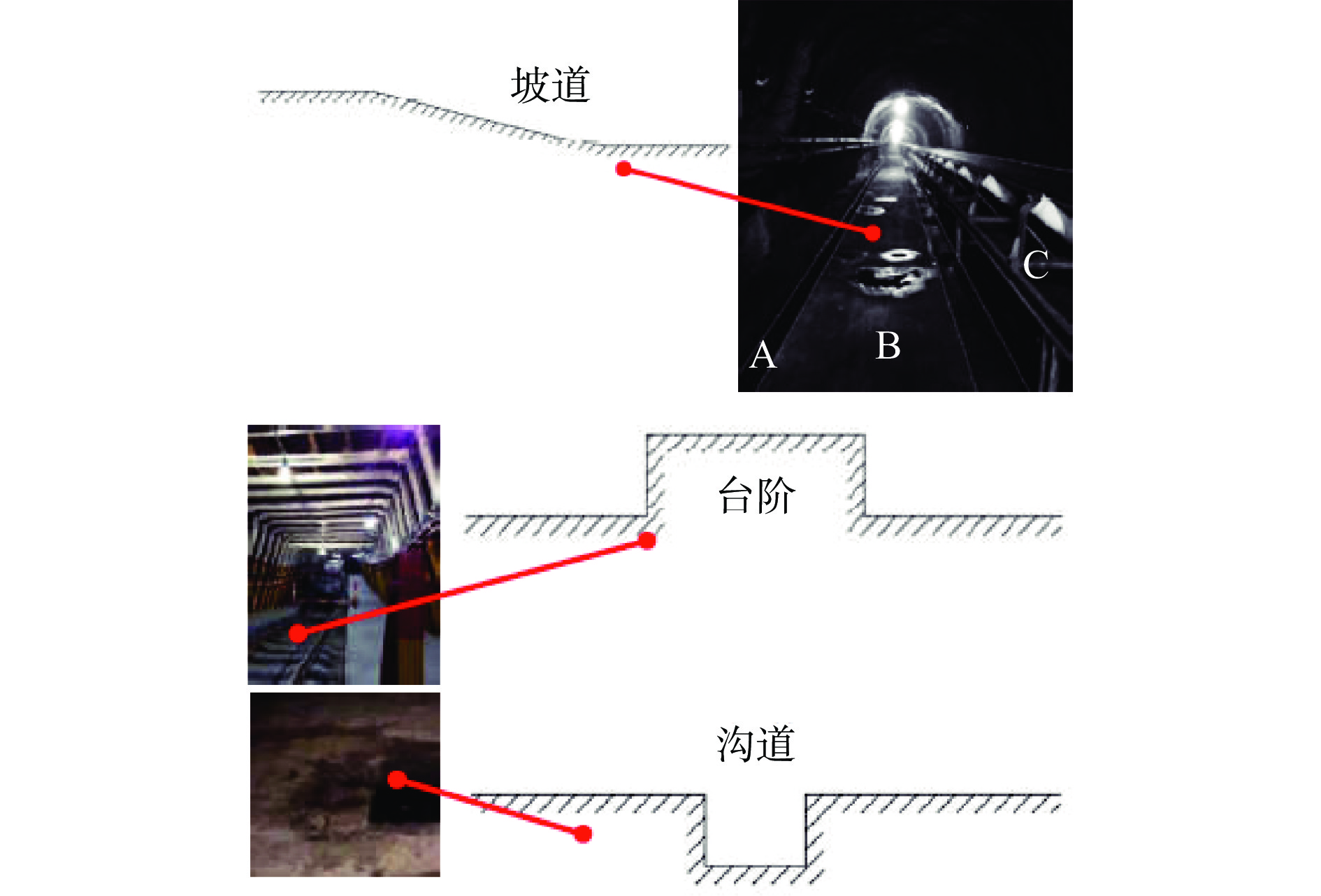
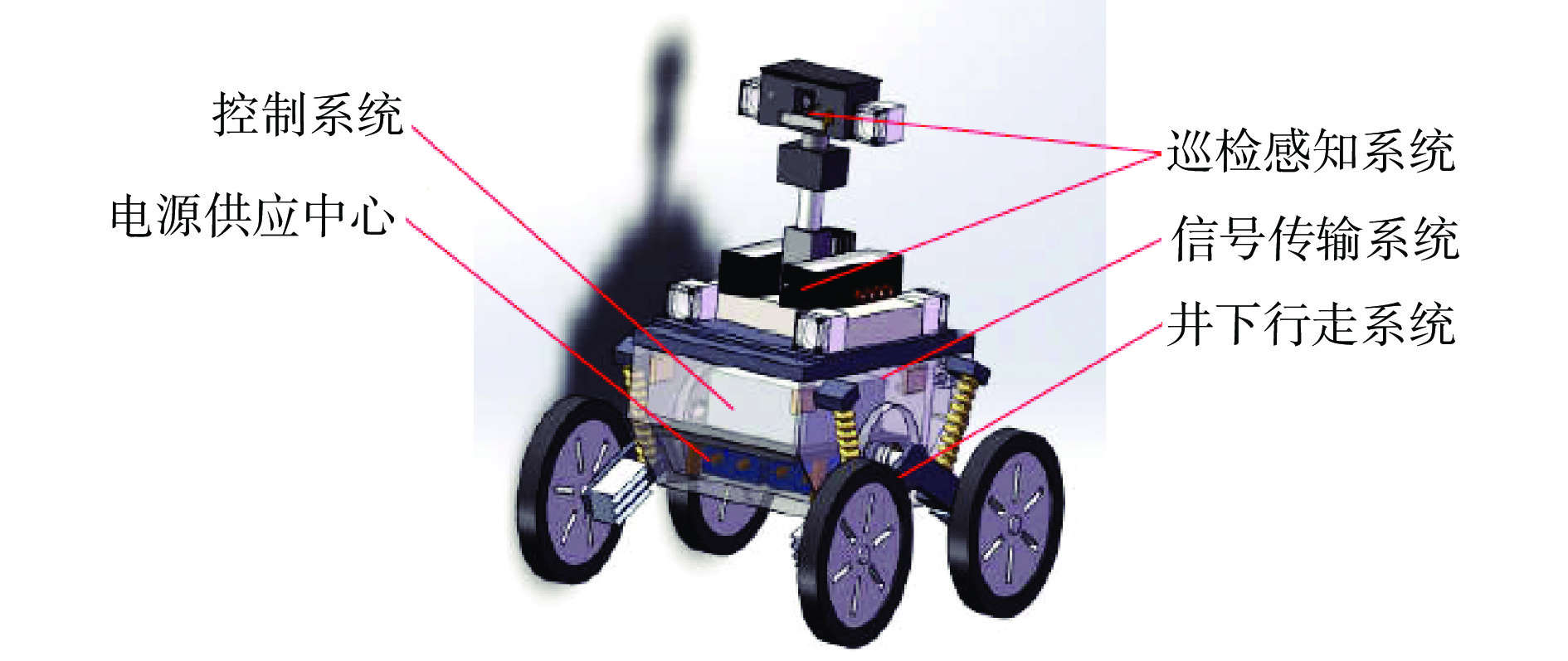
目前主运大巷带式输送机巡检机器人主要采用悬挂轨道式巡检方式,无法巡检位置较低或被遮挡的设备,难以满足井下巷道及设备的全方位巡检需求。设计了一种基于轮式巡检机器人的摇臂式行走机构,与轨道式巡检机器人配合使用,以满足全方位巡检需求。确定了轮式巡检机器人的系统结构,重点对其行走系统进行了分析,分别建立了履带式、轮履式、摇臂式3种行走机构的量化模型,利用德尔菲法与网络分析法对行走机构性能进行了综合分析,结果表明:基于摇臂式行走机构的机器人移动底盘在井下巷道环境内的行走适应性最佳。对摇臂式行走机构中的关键部件倒V型连杆进行静态性能分析,结果表明:倒V型连杆满足煤矿井下常见的坡道满载、紧急转弯、紧急制动3种工况下的强度与刚度需求。面向煤矿井下主运大巷地形特点及运输装备环境,开展模拟巷道内的机器人巡检试验,结果表明:摇臂式轮式巡检机器人在坡道、台阶、沟道的行走测试中均表现出良好的环境适应性,能够满足对煤矿井下巷道及其内部主要设备的巡检需求。
Abstract:Currently, inspection robots for main transport roadway belt conveyors primarily employ a suspended track-based inspection method. However, this approach cannot inspect equipment located in lower or obstructed positions, making it difficult to meet the comprehensive inspection requirements for underground roadways and equipment. A rocker arm walking mechanism for a wheeled inspection robot was designed to complement track-based inspection robots, fulfilling the need for comprehensive inspections. The system structure of the wheeled inspection robot was determined, with a focus on analyzing its walking system. Quantitative models for three walking mechanisms—crawler, wheeled-crawler, and rocker arm—were established. The Delphi method and network analysis were employed for a comprehensive performance evaluation of the walking mechanisms. The results demonstrated that the robot’s mobile chassis, based on the rocker arm walking mechanism, had the best adaptability for walking in the underground roadway environment. Static performance analysis of the key component, the inverted V-link, in the rocker arm walking mechanism revealed that the inverted V-link met the strength and stiffness requirements for three typical working conditions in coal mines: full-load ramp, emergency turning, and emergency braking. Considering the terrain features of the main transport roadway and the environment of the transport equipment in coal mines, simulated inspection experiments were conducted in a laboratory roadway. The results showed that the rocker arm wheeled inspection robot exhibited excellent environmental adaptability during walking tests on ramps, steps, and channels, fulfilling the inspection needs for underground roadways and their main equipment in coal mines.
-
0. 引言
巷道维护是井下煤炭开采过程中的重要环节之一。随着矿井巷道服役时间增加,对巷道表面位移开展定期监测显得尤为重要。目前可采用三维激光扫描技术提取巷道表面点云数据[1],用于巷道表面位移监测,相较传统观测手段,极大提高了工作效率,但采集的点云数据量庞大,且井下巷道环境复杂,使点云数据中存在较多的冗余数据,给后续变形量统计分析工作增加了难度。因此有必要对原始点云数据进行精简处理,在快速去除冗余点的同时,保留更多的特征信息。
目前,关于点云数据精简方法[7-8]可大致分为不考虑点云特征和考虑点云特征,主要包括曲率精简方法[9]、随机精简方法[10]和栅格精简方法[11]。鉴于煤矿巷道变形分析的特殊需求,主要研究考虑点云特征的精简方法,在这方面大多数学者主要依据点云的曲率[12]、法向量夹角[13]及点云中点与点的欧氏距离等特征[14]作为点云数据是否舍弃的判别标准。何宽等[15]提出了基于逐点前进法的点云数据精简方法,并对线扫描数据进行了实验分析。李佩佩等[16]提出了基于二分K−means聚类的曲率分级点云精简方法,利用二分K−means聚类划分特征区,在保证残肢表面完整无孔洞的同时,保留了残肢点云的亚特征信息。章紫辉等[17]提出了一种基于邻域点位置特征的点云数据精简方法,根据权值计算投影面、搜寻矩阵大小及精简比例对目标点云进行精简。梁栋等[18]提出了保留特征点的大数据量点云分类精简方法,可在较高的精简率下均匀化平坦区域数据点,最大化地保留模型细节特征,避免孔洞产生,而且在速度上也取得了较好效果。丁吉祥等[19]提出了一种面向几何特征保留的点云精简方法,能够基于不同精简方法实现不同区域的点云精简,且精简后点云均匀无孔洞,整体几何特征形状保留完整。然而,现有方法存在大数量级点云处理过程中细节保留不足的问题。
鉴此,本文提出了一种基于二次特征提取的煤矿巷道表面点云数据精简方法。首先对原始点云进行去噪预处理并建立K−d树;然后进行初步区域划分后对特征区域二次提取,将特征区域进一步划分为特征点和非特征点,使用体素随机采样完成非特征点简化处理,对非特征区域的点云进行随机采样简化;最后将各类点云精简结果进行合并。
1. 方法流程
基于二次特征提取的煤矿巷道表面点云数据精简方法流程如图1所示。首先,对原始巷道表面点云数据进行去噪预处理并建立K−d树,提高计算效率;其次,计算点云的法向量夹角,根据设定的法向量夹角阈值α1将点云区域划分为特征区域和非特征区域,并对所划分的非特征区域进行随机下采样;然后,计算特征区域的法向量,设置一个大于α1的法向量夹角阈值α2,并依此阈值再次将特征区域点云划分为特征点与非特征点,同时对非特征点利用体素随机采样法进行精简;最后,将2次点云简化结果与特征点部分的点云合并,完成点云精简。
![]() 图 1 煤矿巷道表面点云数据精简方法流程Figure 1. Flowchart of point cloud data simplification method of coal mine roadway surface
图 1 煤矿巷道表面点云数据精简方法流程Figure 1. Flowchart of point cloud data simplification method of coal mine roadway surface2. 方法原理
2.1 法向量计算
在点云的采样表面处处光滑的情况下,任何点的局部邻域都可用平面进行很好的拟合。因此针对点云的特征区域与非特征区域的划分,需先建立K−d树[17],使用基于局部表面拟合的方法进行法向量估计。选取的点集不同,建立的K−d树不同,因此需对去噪预处理后点云及特征区域点云都进行法向量估计。
在法向量计算中,对于点云中的每个扫描点,搜索与其最近邻的k个相邻点并构成K邻域,然后计算这些点最小二乘意义上的局部平面P。
$$ P\left( {{\boldsymbol{n}},d} \right) = \mathop {\arg \min }\limits_{\left( {{\boldsymbol{n}} ,d} \right)} \sum\limits_{i = 1}^k {{{\left( {{\boldsymbol{n}} {p_i} - d} \right)}^2}} $$ (1) 式中:n为平面P的法向量;d为Р到坐标原点的距离;pi为点云中第i(i=1,2,···,k)个点。
在本文方法中,认为由最近邻的k个相邻点拟合出的平面的法向量即当前扫描点的法向量。平面P的法向量可由主成分分析法得到,P经过其K邻域的质心p0,且法向量n满足$ \left\| {\boldsymbol{n}} \right\| = 1 $。因此,先对协方差矩阵M进行特征值分解,求得M的各特征值,M的最小特征值所对应的特征向量即P的法向量。
$$ {\boldsymbol{M}} = \frac{1}{k}\sum\limits_{i = 1}^k {\left( {{p_i} - {p_0}} \right){{\left( {{p_i} - {p_0}} \right)}^{\rm{T}}}} $$ (2) 进一步,需采用以下方法对求出的法向量进行定向:假设点云足够稠密且采样平面处处光滑,那么相邻2个点的法向量会接近于平行。如果相邻2个点法向量的方向一致,则这2个点的法向量内积约为1;若该内积为负,则说明其中某个点的法向量需要被翻转。因此,先为点云中某个点设定一个法向量方向,然后遍历其他所有点,若当前点与下一个要遍历的点的法向量内积小于0,则将下一个要遍历的点的法向量翻转,否则保持其法向量方向不变。
2.2 基于法向量夹角的点云区分
在对点云进行法向量夹角计算后,根据点云特征设定法向量夹角阈值α1,之后遍历点云数据进行夹角对比,将满足条件的点划分到特征区域并保存,将剩余的点保存到非特征区域。
通过计算法向量,可得点云中点与点之间的几何关系。若局部区域点之间的点云法向量夹角较大,则可认为该区域为非平坦区域,即特征区域;若在该区域中的法向量夹角变化不大,则可认为该区域较为平坦,即非特征区域。基于法向量夹角的特征区域选取原理如图2所示,其中箭头表示某点处的法向量,θ为法向量夹角。
![]() 图 2 基于法向量夹角的特征区域选取原理Figure 2. Principle of feature area selection based on normal vector angle
图 2 基于法向量夹角的特征区域选取原理Figure 2. Principle of feature area selection based on normal vector angle定义pi与其邻近点法向量夹角的算术平均值:
$$ {f_i} = \sum\limits_{j = 1}^k {{\theta _{ij}}} $$ (3) 式中θij为pi点与邻近点pj(j=1,2,···,k,i≠j)点的法向量夹角。
根据pi与其邻近点法向量夹角来提取特征点,需选取适当的法向量夹角阈值α1。当fi>α1时,则pi为特征点;当fi≤α1时,则pi为非特征点。由此,将经过去噪预处理的点云初步划分为特征区域和非特征区域。
由于初始的点云数据量级很大,且为了保留更多特征,设定的阈值α1较小,可能会导致特征区域周围一些特征不明显的点被划分至特征区域。所以,在经过第1次区域划分后,位于特征区域的点需经过第2次区域划分。设定阈值α2,且保证α2>α1,根据式(3)计算位于特征区域中某点pi'与其邻近点法向量夹角的算术平均值fi'。当fi'>α2时,则将pi'划分为特征区域特征点;当fi'≤α2时,则将pi'划分为特征区域非特征点。
2.3 体素随机采样
为保留数据特征的同时,初步降低点云数据总量并去除冗余数据,对数据进行体素随机采样。首先依据点云的数据坐标集合,求取X,Y,Z坐标轴上的最大值Xmax,Ymax,Zmax和最小值Xmin,Ymin,Zmin。然后设置体素小栅格的边长r,根据X,Y,Z坐标轴上的最大值、最小值求得点云最小包围盒的边长LX,LY,LZ。
$$ \left\{ \begin{gathered} {L_X} = {X_{\max }} - {X_{\min }} \\ {L_Y} = {Y_{\max }} - {Y_{\min }} \\ {L_Z} = {Z_{\max }} - {Z_{\min }} \\ \end{gathered} \right. $$ (4) 计算体素小栅格的尺寸DX,DY,DZ:
$$ \left\{ \begin{gathered} {D_X} = \left\lfloor {{L_X}/r} \right\rfloor \\ {D_Y} = \left\lfloor {{L_Y}/r} \right\rfloor \\ {D_Z} = \left\lfloor {{L_Z}/r} \right\rfloor \\ \end{gathered} \right. $$ (5) 进一步,计算点云中每一个点在体素小栅格内的索引h:
$$ \left\{ \begin{gathered} h = {h_X} + {h_Y}{D_X} + {h_Z}{D_X}{D_Y} \\ {h_X} = \left\lfloor {(X - {X_{\min }})/r} \right\rfloor \\ {h_Y} = \left\lfloor {(Y - {Y_{\min }})/r} \right\rfloor \\ {h_Z} = \left\lfloor {(Z - {Z_{\min }})/r} \right\rfloor \\ \end{gathered} \right. $$ (6) 最后,将索引h中的元素hX,hY,hZ按照从小到大的顺序排序,每个体素小栅格内随机选取一个点代替小栅格内的所有点。
2.4 巷道表面点云数据简化
由于第1次特征提取时,设定的阈值α1较小,会将大部分包含特征信息的点云划分到特征区域,可认为在非特征区域所包含的特征信息已经很少,因此可对这一部分的点云数据进行随机采样,从而对整个方法进行提速。针对经过第2次区域划分的位于特征区域的非特征点,采用体素随机采样法进行数据简化。最后,将简化后的各类点云数据合并,输出精简后的点云数据。
3. 实验及结果分析
选取WHU−TLS基准数据集[21-22]中地下矿道数据进行模拟实验,数据量达百万级。为提高后续实验结果精度,选取去噪优化后的一部分巷道点云数据进行分析处理,所选整体数据集及截取局部部分如图3所示。
为验证本文方法的可行性与有效性,分别采用曲率精简方法、随机精简方法、栅格精简方法和本文方法对巷道表面点云数据进行精简,将数据量简化为原始数据的50%,30%,10%,对比不同方法的精简效果及在Geomagic Studio软件中的三维重建模型,如图4−图6所示。
![]() 图 4 精简率为50%的简化及三维重建结果Figure 4. Simplification and 3D reconstruction results with reduction rate of 50%
图 4 精简率为50%的简化及三维重建结果Figure 4. Simplification and 3D reconstruction results with reduction rate of 50%![]() 图 6 精简率为10%的简化及三维重建结果Figure 6. Simplification and 3D reconstruction results with reduction rate of 10%
图 6 精简率为10%的简化及三维重建结果Figure 6. Simplification and 3D reconstruction results with reduction rate of 10%![]() 图 5 精简率为30%的简化及三维重建结果Figure 5. Simplification and 3D reconstruction results with reduction rate of 30%
图 5 精简率为30%的简化及三维重建结果Figure 5. Simplification and 3D reconstruction results with reduction rate of 30%从图4−图6可看出,在相同精简率下,曲率精简方法虽然保留了较多的特征信息,但对特征不明显区域的简化过度,在后续的三维重建中出现了明显的空洞,如图6(e)中红色虚线框所示。随机精简方法对数据的简化处理具有随机性,面对整体特征细节丰富的巷道表面点云数据,简化后的三维重建结果存在细节缺失的现象。栅格精简方法因其固有原理没有特意保留特征信息,简化后的三维重建结果整体分布均匀,但丢失了较多的表面点云数据特征,效果较差。本文方法在特征保留方面优于随机精简方法和栅格精简方法,在对非特征区域的简化方面弥补了曲率精简方法的不足,在高精简率的条件下,精简效果较好。
对比图6(f)−图6(h)中的红色虚线框可看出,在较高的精简率条件下,本文方法仍能在保留特征的同时正确重建三维结构。
为验证二次特征提取相较于一次特征提取能够更多地保留点云丰富的特征信息,将去噪优化后的原始点云数据、一次特征提取精简数据(法向量夹角阈值α1在10%,30%,50%精简率下均为90°)及二次特征提取精简数据(法向量夹角阈值α1在10%,30%,50%精简率下均为90°,法向量夹角阈值α2在10%,30%,50%精简率下均为120°)分别导入Geomagic Studio软件进行三维模型构建,并以优化的原始点云数据构建的三维模型作为对比标准,进行最大偏差及标准偏差的计算,结果见表1。其中,标准偏差是Geomagic Studio软件中评价三维模型重构精度的评价指标,是由拟合残差计算出的中误差。
表 1 不同特征提取次数下最大偏差与标准偏差Table 1. The maximum deviation and standard deviation under different feature extraction times特征提取方式 精简率/% 最大偏差(正向/负向)/m 标准偏差/m 一次特征提取 10 1.340 6/−2.807 2 0.038 93 二次特征提取 0.918 3/−0.748 4 0.036 44 一次特征提取 30 3.049 9/−2.398 7 0.035 16 二次特征提取 2.754 1/−2.375 9 0.033 27 一次特征提取 50 1.582 8/−1.835 1 0.021 50 二次特征提取 2.739 3/−2.226 8 0.020 66 由表1可知,在不同精简率条件下,二次特征提取对应的标准偏差均小于一次特征提取,这是因为二次特征提取在保留点云特征方面更加有效。
为更加客观地评估精简质量,将4种方法简化后的数据及去噪优化后的原始点云数据导入Geomagic Studio软件进行三维模型构建,同样以优化的原始点云数据构建的三维模型作为对比标准,分别对4种简化三维模型进行最大偏差及标准偏差的计算,结果见表2。
表 2 不同精简方法下最大偏差与标准偏差Table 2. The maximum deviation and standard deviation under different simplification methods精简方法 精简率/% 最大偏差(正向/负向)/m 标准偏差/m 曲率精简方法 10 2.800 9/−1.894 9 0.057 88 随机精简方法 2.452 6/−2.663 3 0.060 37 栅格精简方法 1.310 7/−3.052 4 0.055 09 本文方法 0.918 3/−0.748 4 0.036 44 曲率精简方法 30 3.265 2/−2.712 2 0.043 39 随机精简方法 2.428 1/−2.465 9 0.037 65 栅格精简方法 3.268 8/−1.856 2 0.039 15 本文方法 2.754 1/−2.375 9 0.033 27 曲率精简方法 50 3.151 3/−1.562 2 0.025 77 随机精简方法 2.848 6/−1.216 0 0.020 82 栅格精简方法 2.857 8/−1.550 1 0.033 63 本文方法 2.739 3/−2.226 8 0.020 66 由表2可知,本文方法在不同精简率条件下标准偏差均为最小,标准偏差平均可低于相同精简率下其他方法30%左右,表明本文方法对特征点的保留情况较好,精简后特征损失很小。
4. 结语
针对煤矿巷道三维激光扫描后点云数据量级大的问题,提出了基于二次特征提取的煤矿巷道表面点云数据精简方法。该方法首先通过预处理去除噪声数据;然后依据较小的法向量夹角阈值对点云进行初步的特征区域与非特征区域划分,再利用较大的法向量夹角阈值将特征区域点云划分为特征点和非特征点,并对非特征点进行体素随机采样,对非特征区域的点云进行随机下采样;最后将点云精简结果与特征点部分的点云合并。结合地下巷道点云数据开展仿真实验,结果表明:在百万数据量级的点云及较高精简率条件下,该方法能有效避免孔洞现象发生,在特征细节保留上有较好的效果。
-
![]()
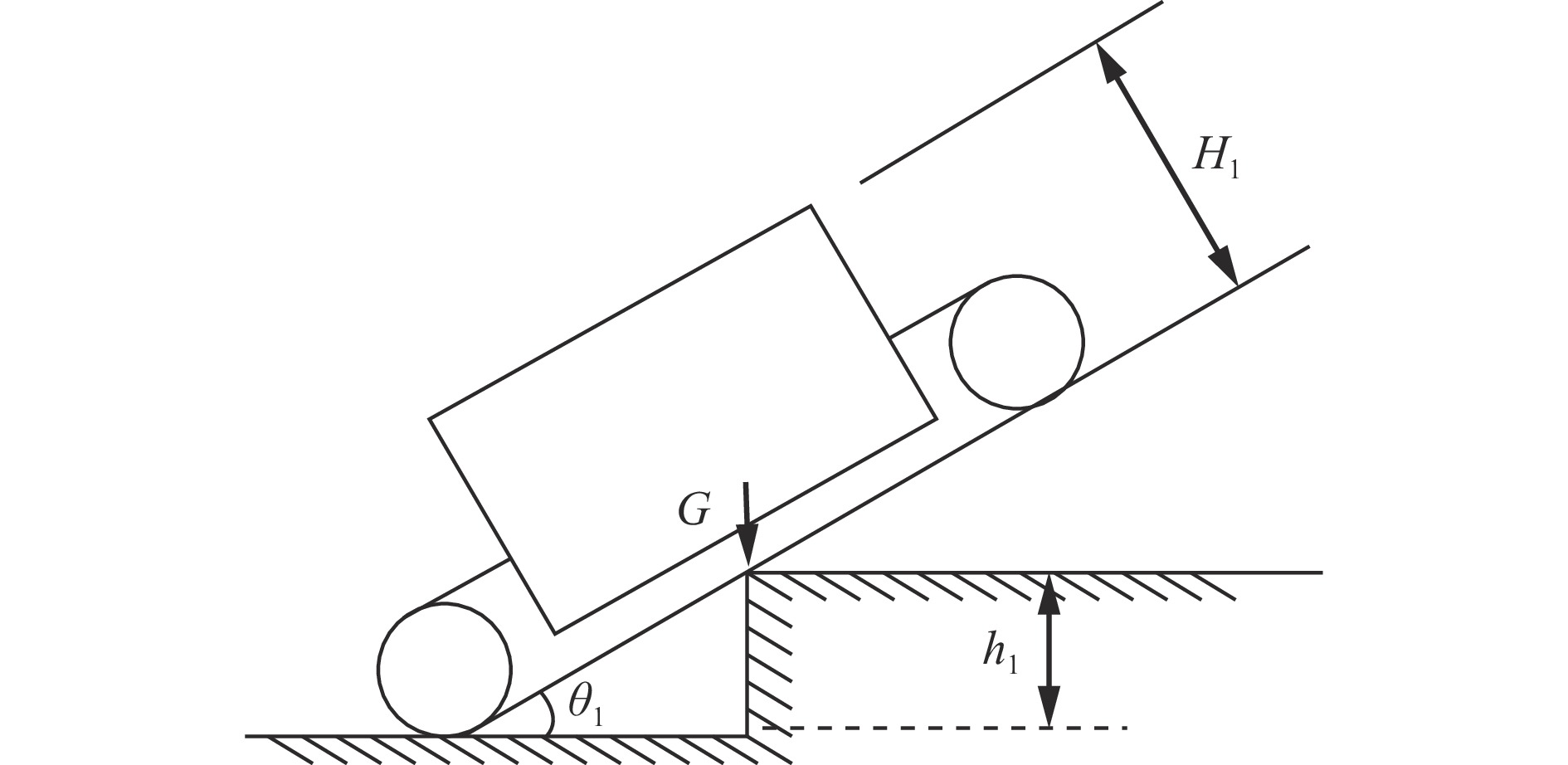
图 6 履带式行走机构翻越沟道的极限位置
Figure 6. Limit position of crawler walking mechanism crossing a channel
![]()
图 7 履带式行走系统翻越单级台阶的极限位置
Figure 7. Limit position of crawler walking system climbing a single-step stair
![]()
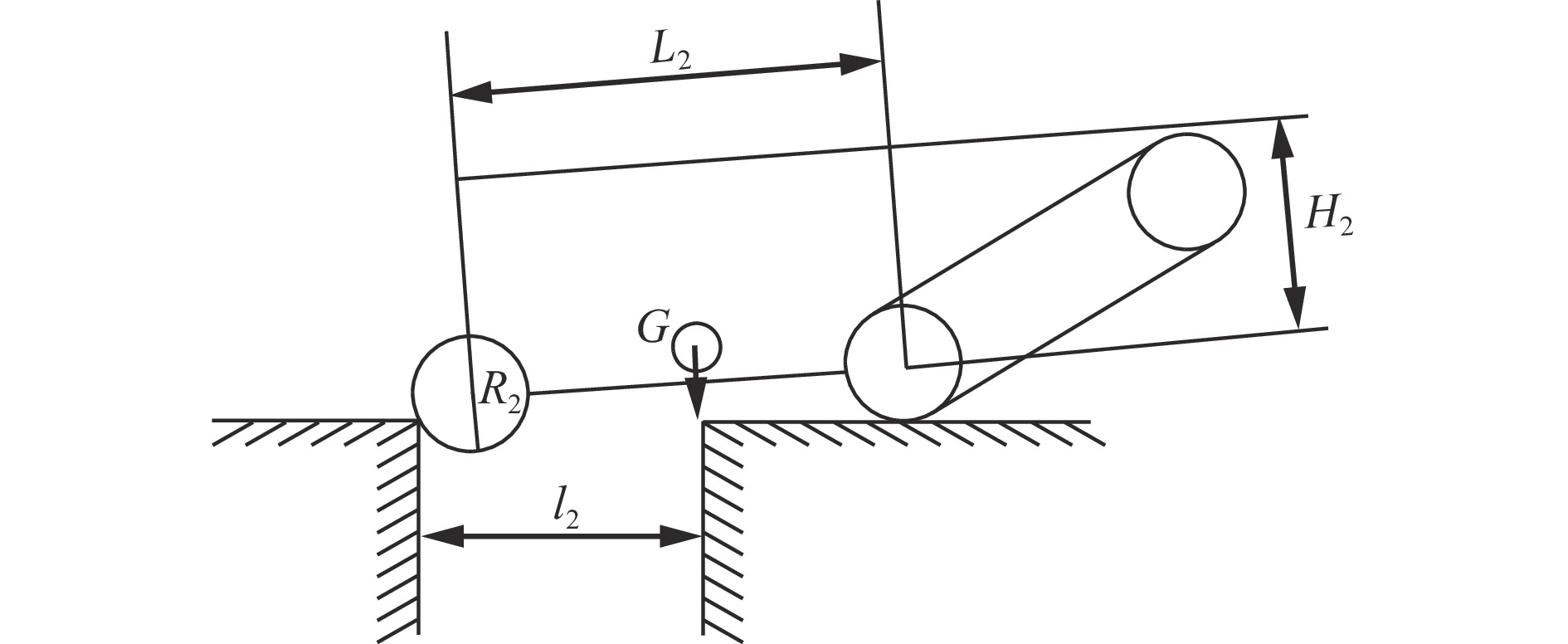
图 8 轮履式行走机构跨越沟道的极限位置
Figure 8. Limit position of wheeled-crawler walking mechanism crossing a channel
![]()
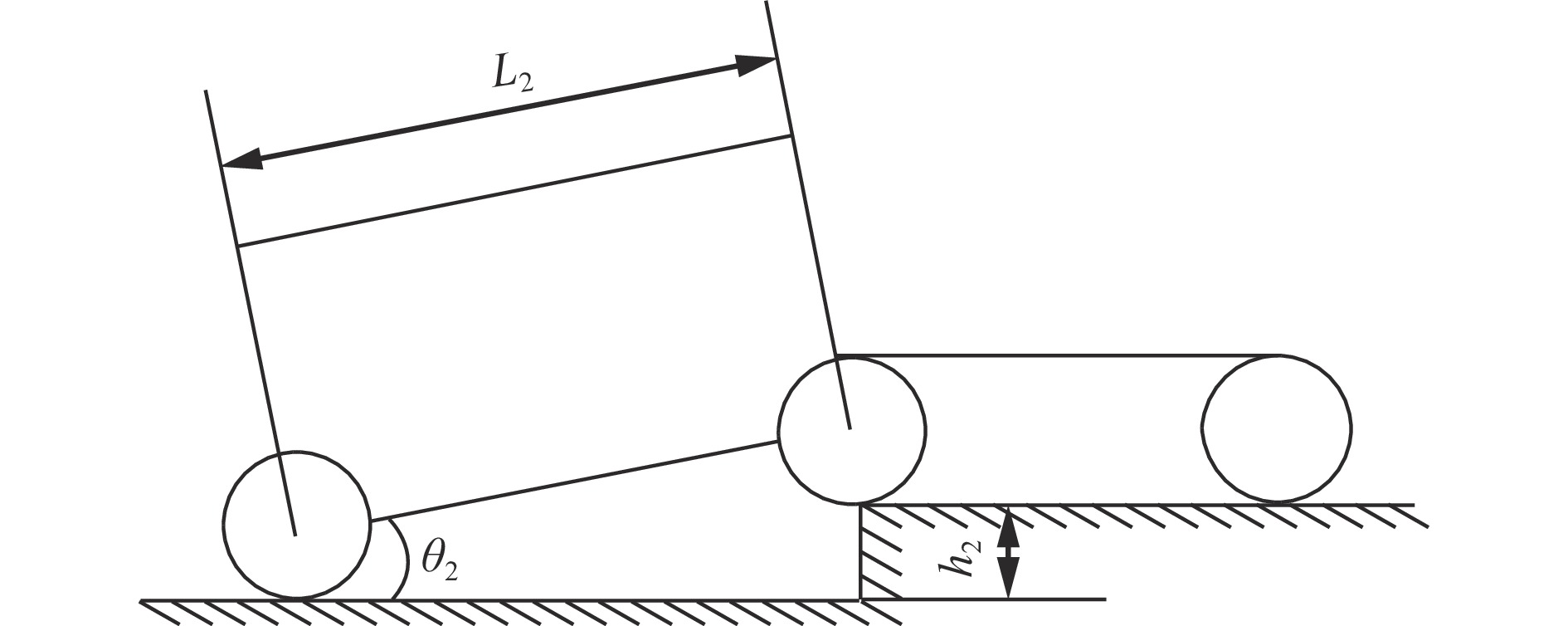
图 9 轮履式行走机构跨越单级台阶的极限位置
Figure 9. Limit position of wheeled-crawler walking mechanism climbing a single-step stair
![]()
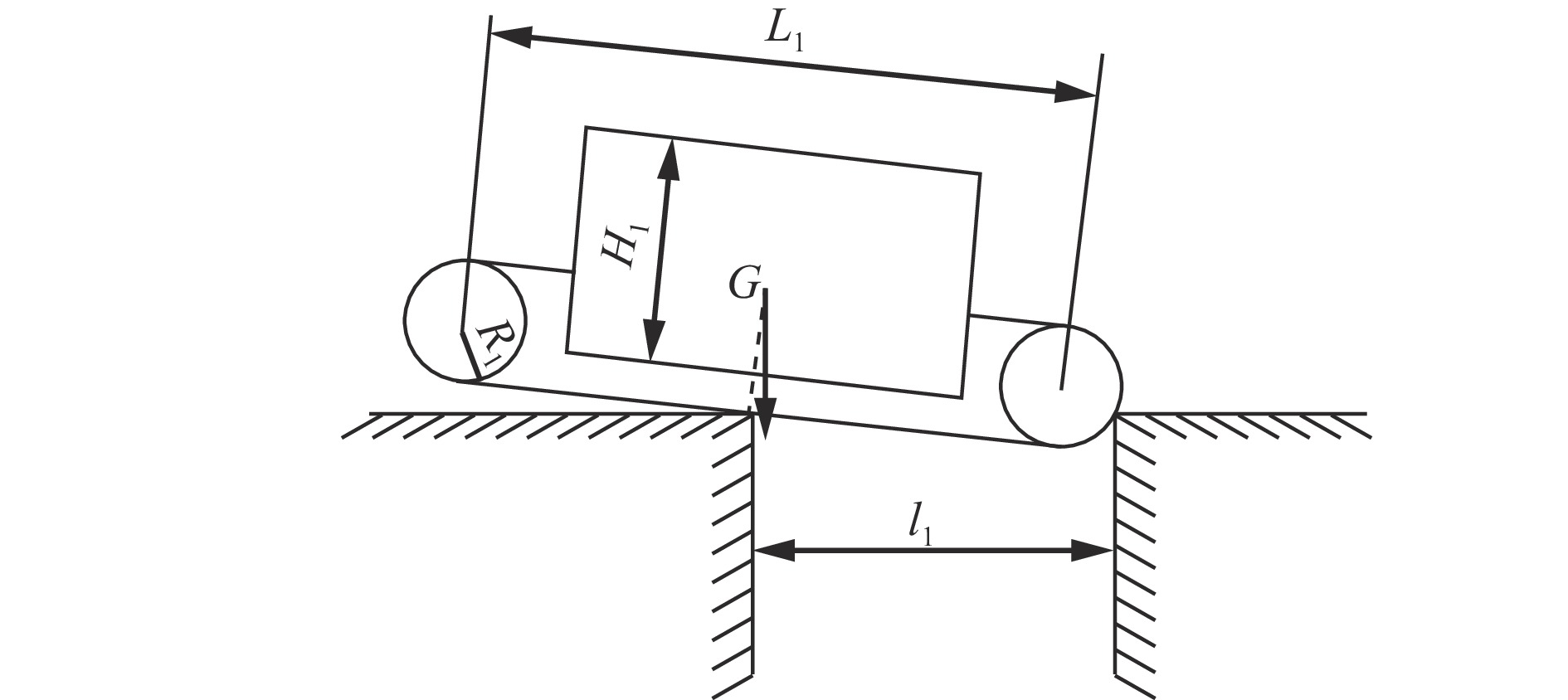
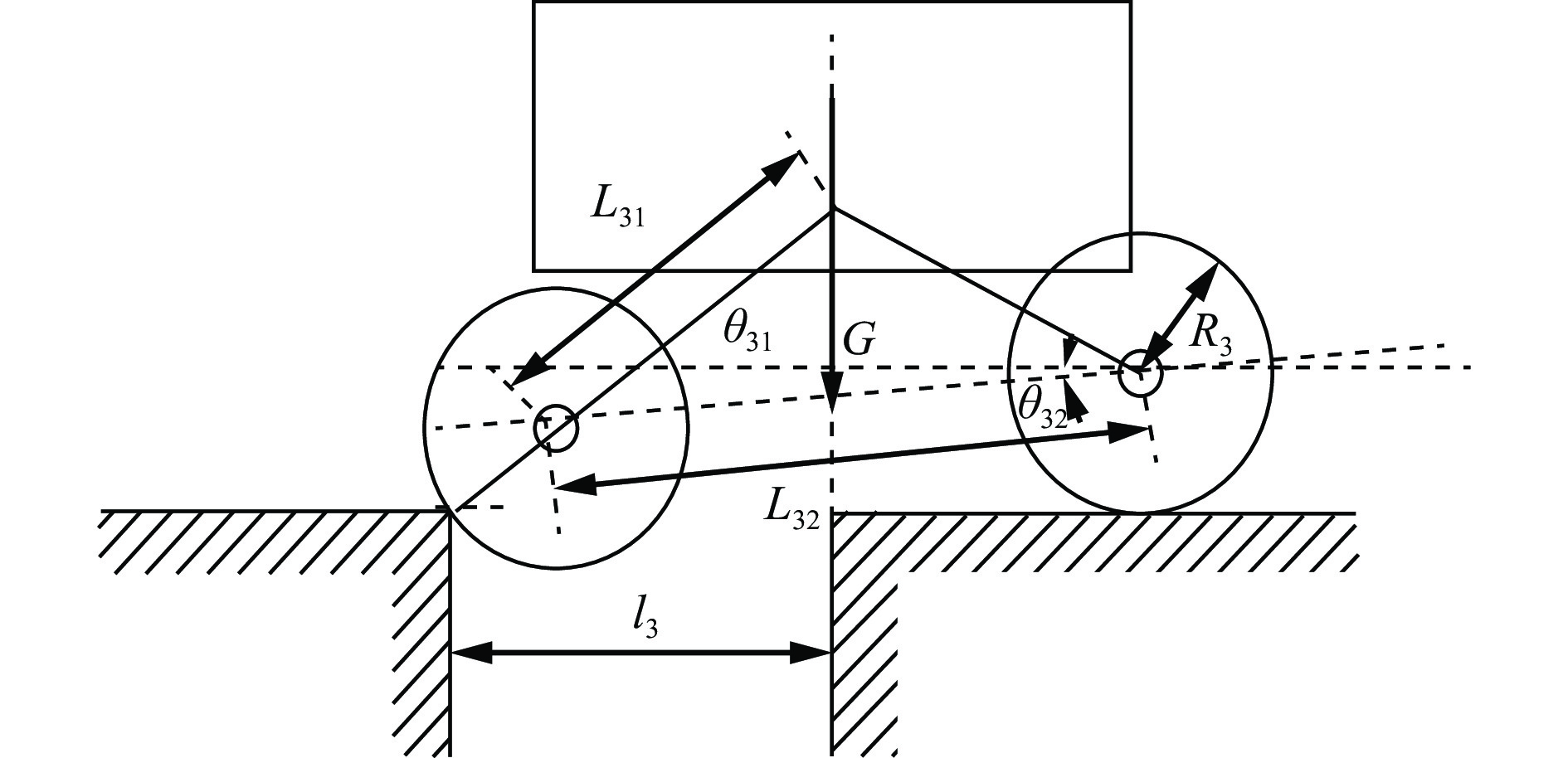
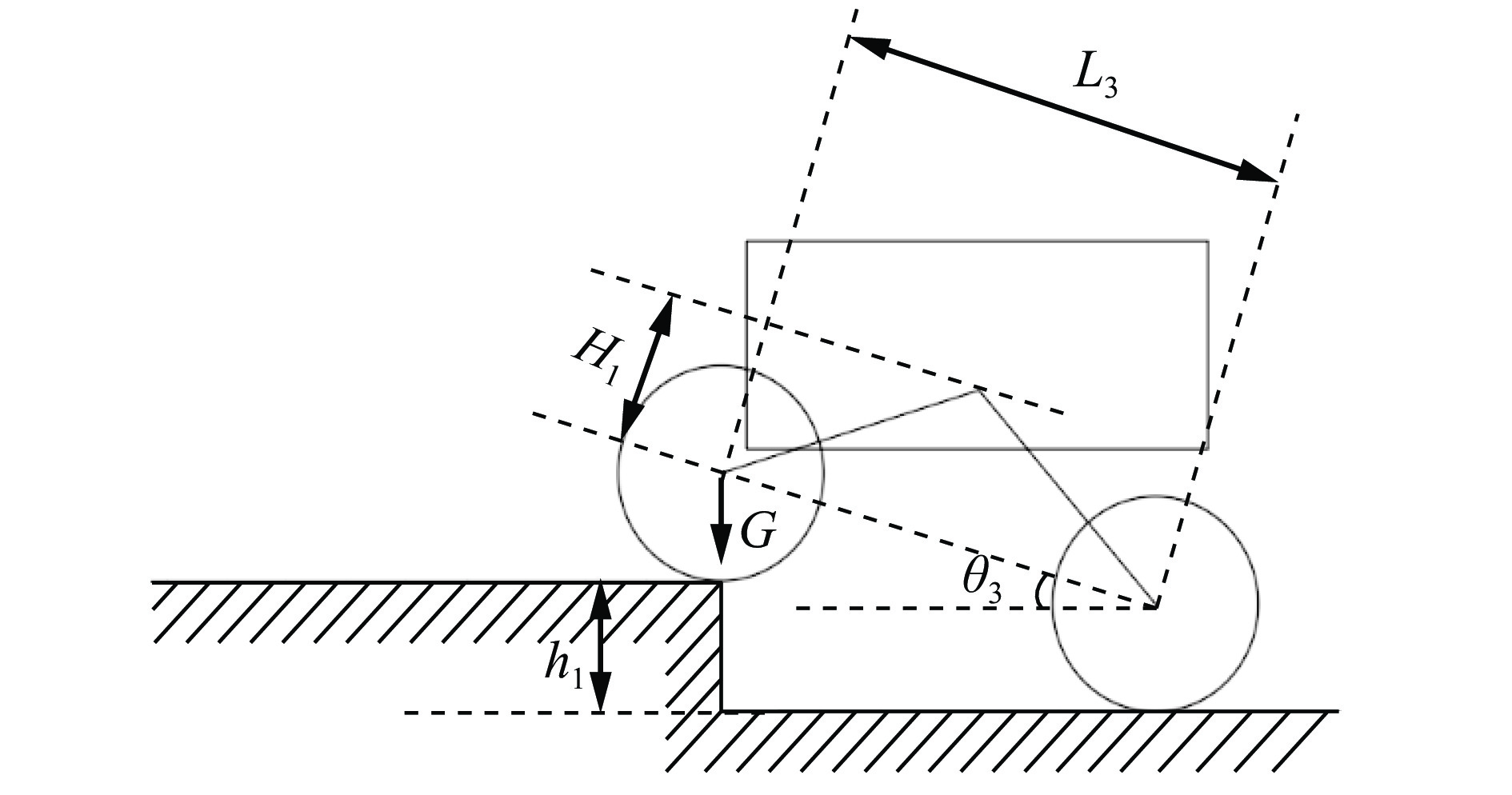
图 10 摇臂式行走机构跨越沟道的极限位置
Figure 10. Limit position of rocker arm walking mechanism crossing a channel
![]()
图 11 摇臂式行走系统翻越单级台阶极限位置
Figure 11. Limit position of rocker arm walking system climbing a single-step stair
![]()
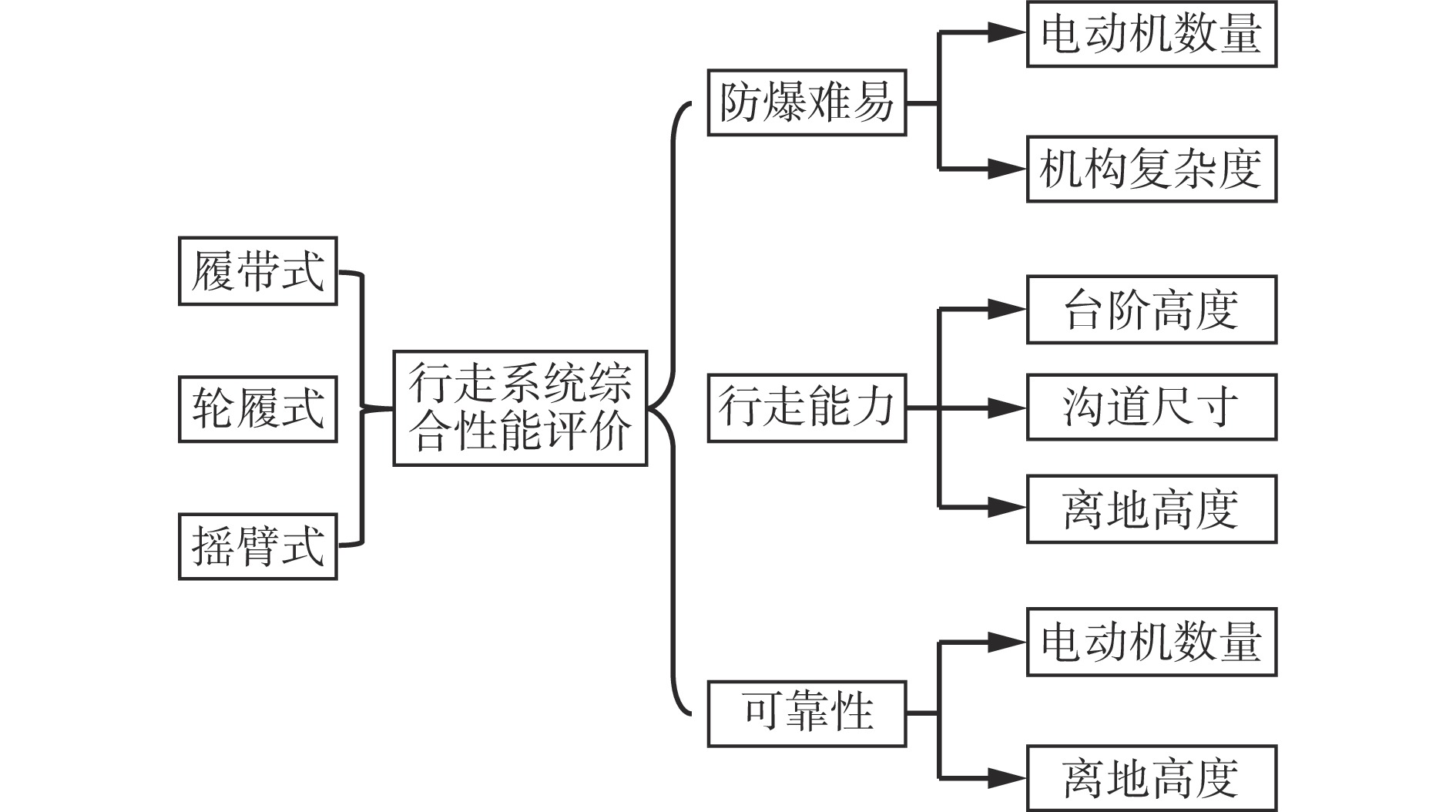
图 13 综合分析法递归层次结构模型
Figure 13. Recursive hierarchy model of comprehensive evaluation method
![]()
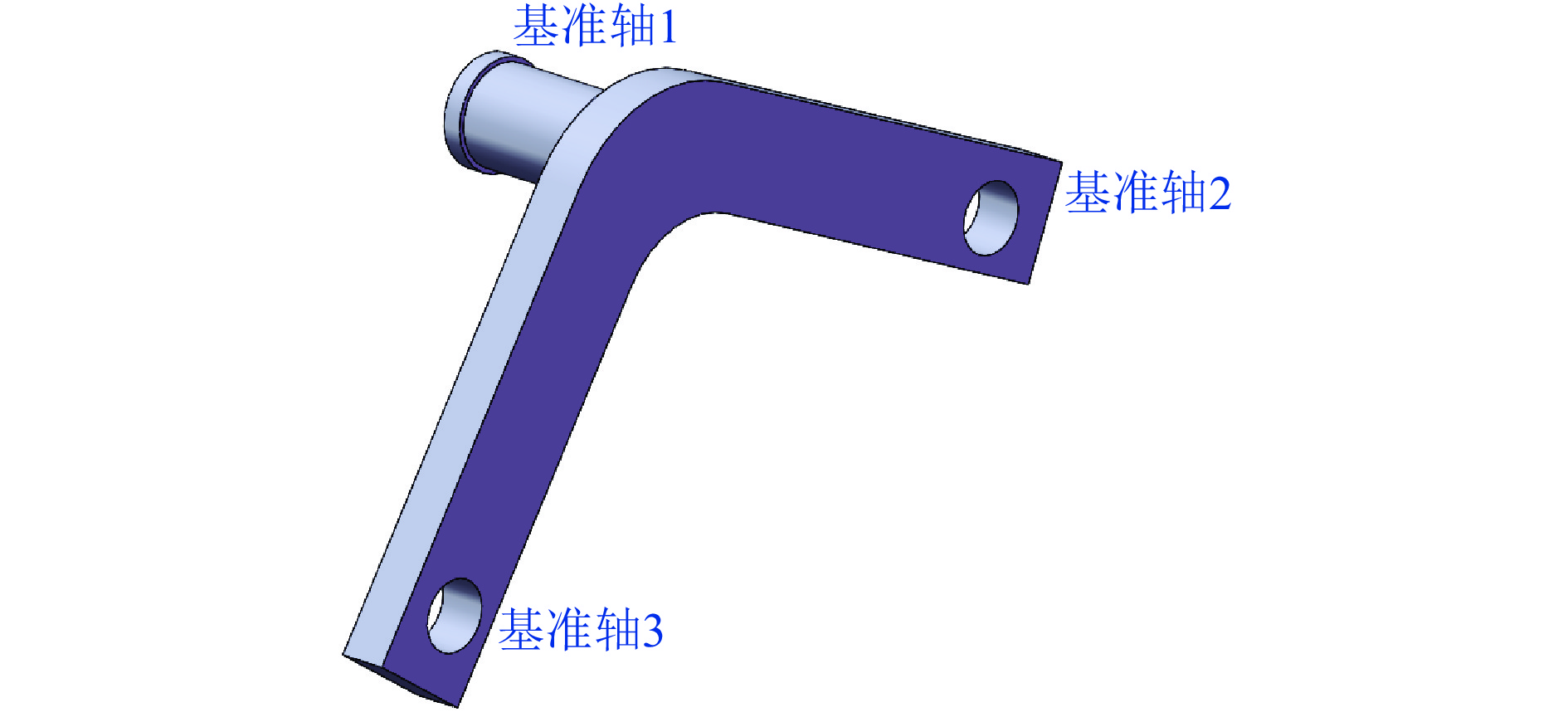
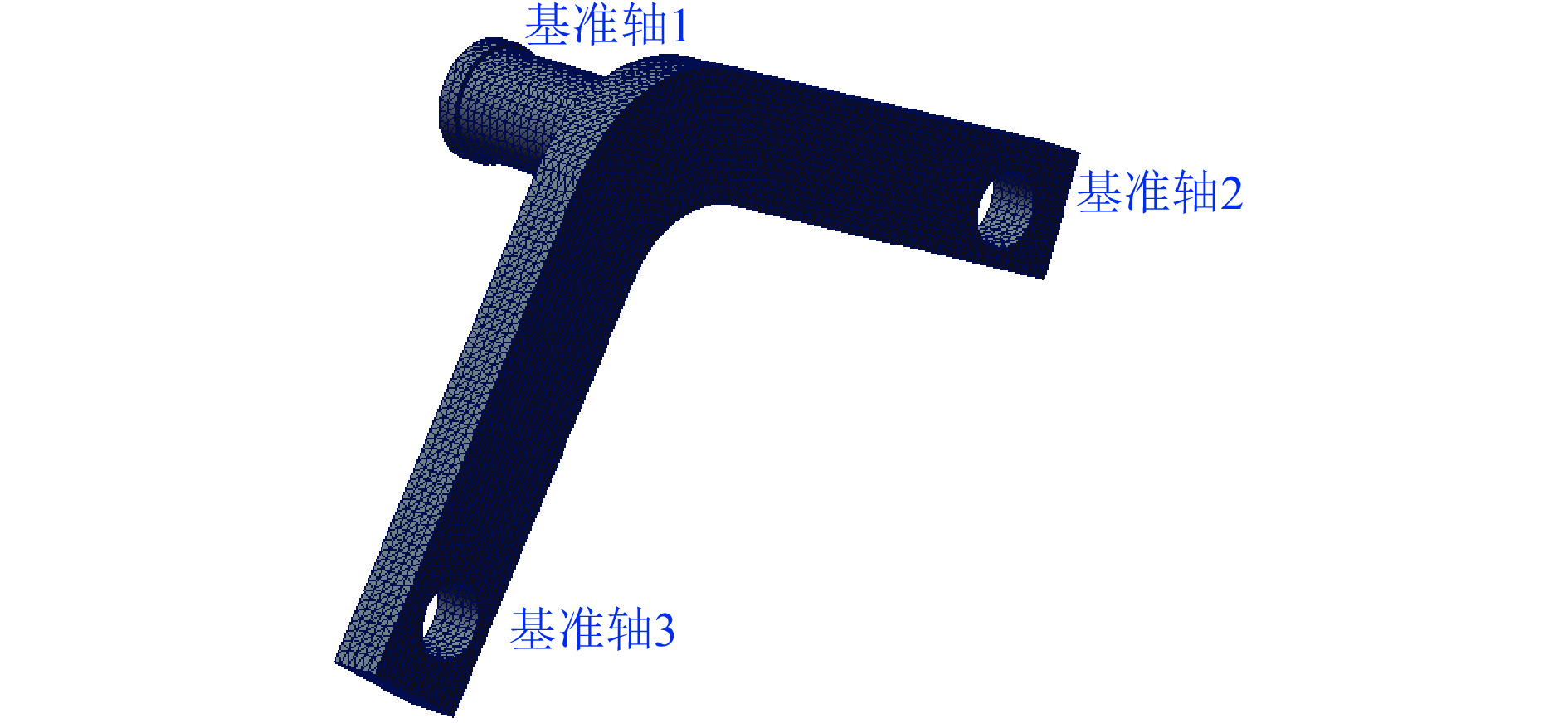
图 15 网格划分完成后的倒V型连杆几何模型
Figure 15. Geometric model of inverted v-link after mesh division
![]()
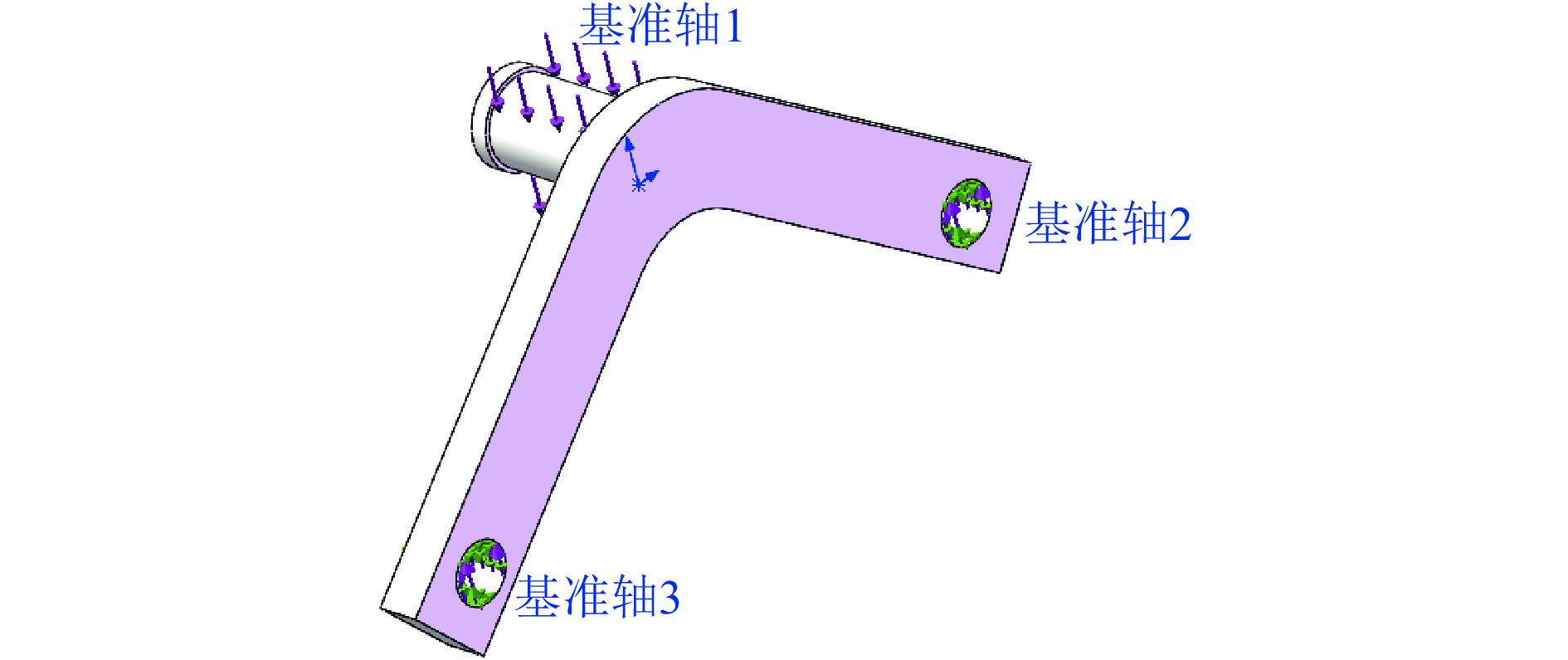
图 16 坡道满载工况下连杆的边界条件与载荷设置
Figure 16. Boundary conditions and load settings for the link under ramp full-load condition
![]()
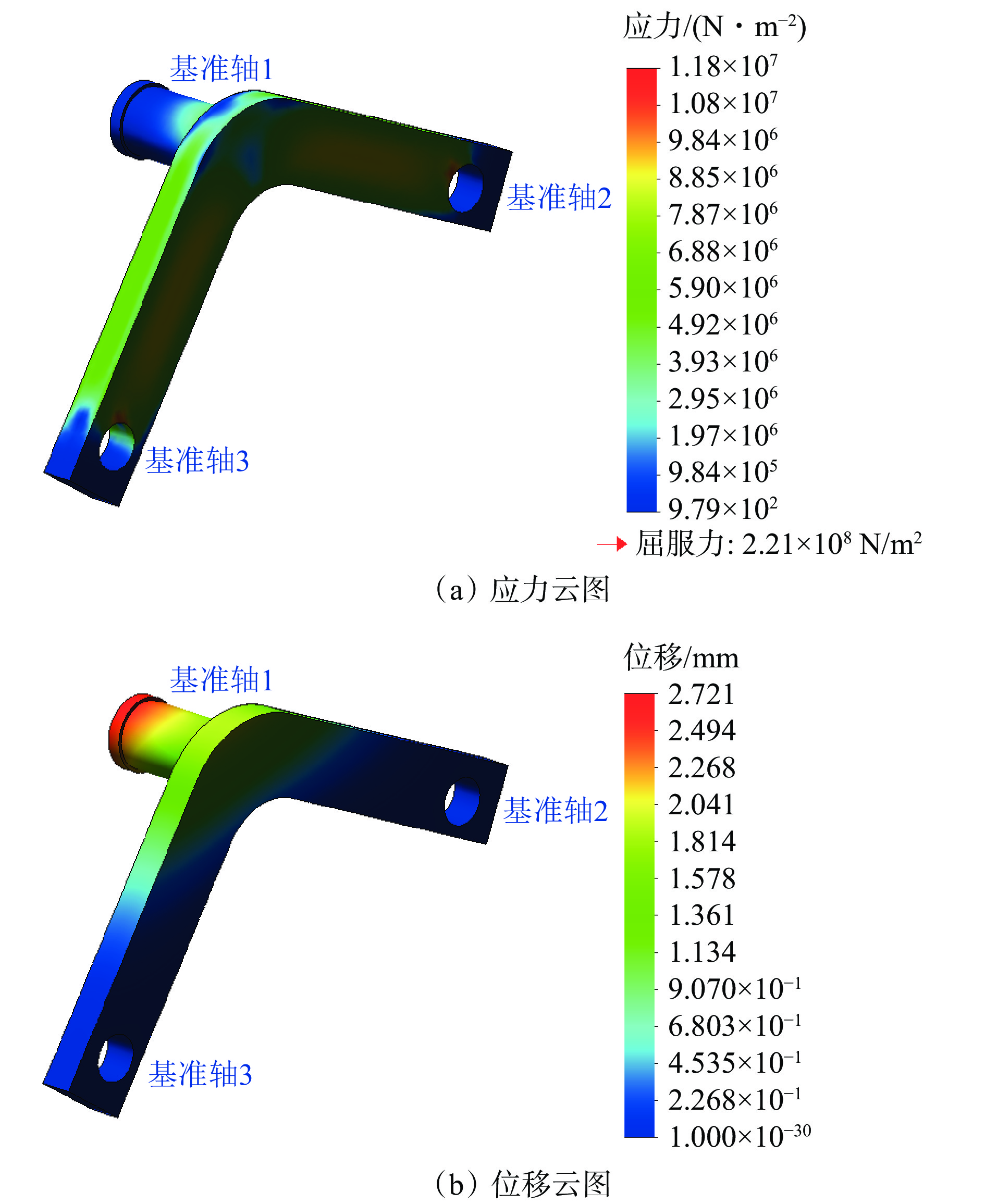
图 17 坡道满载工况下的连杆应力和位移云图
Figure 17. Stress and displacement cloud maps of the link under ramp full-load condition
![]()
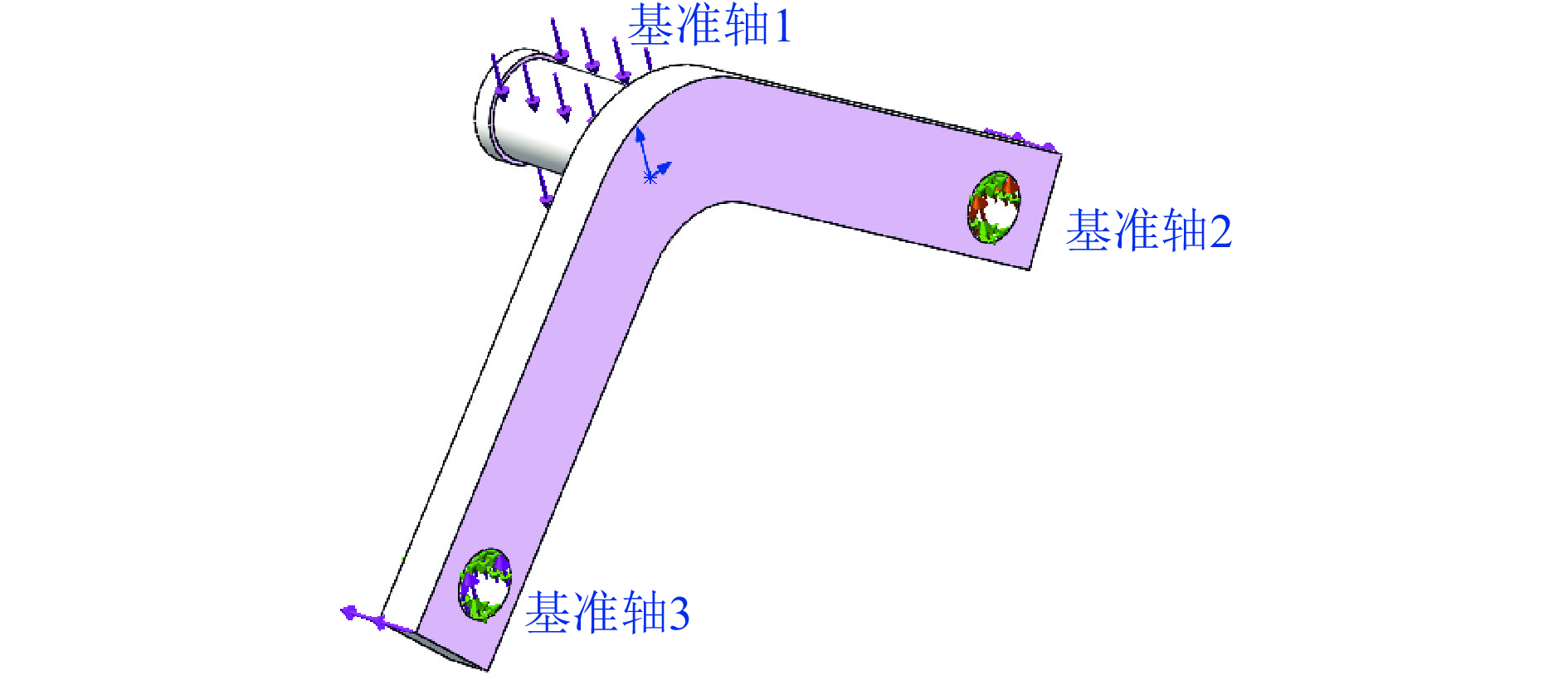
图 18 紧急转弯工况下连杆的边界条件与载荷设置
Figure 18. Boundary conditions and load settings for the link under emergency turning condition
![]()
图 19 紧急转弯工况下连杆的应力和位移云图
Figure 19. Stress and displacement cloud maps of the link under emergency turning condition
![]()
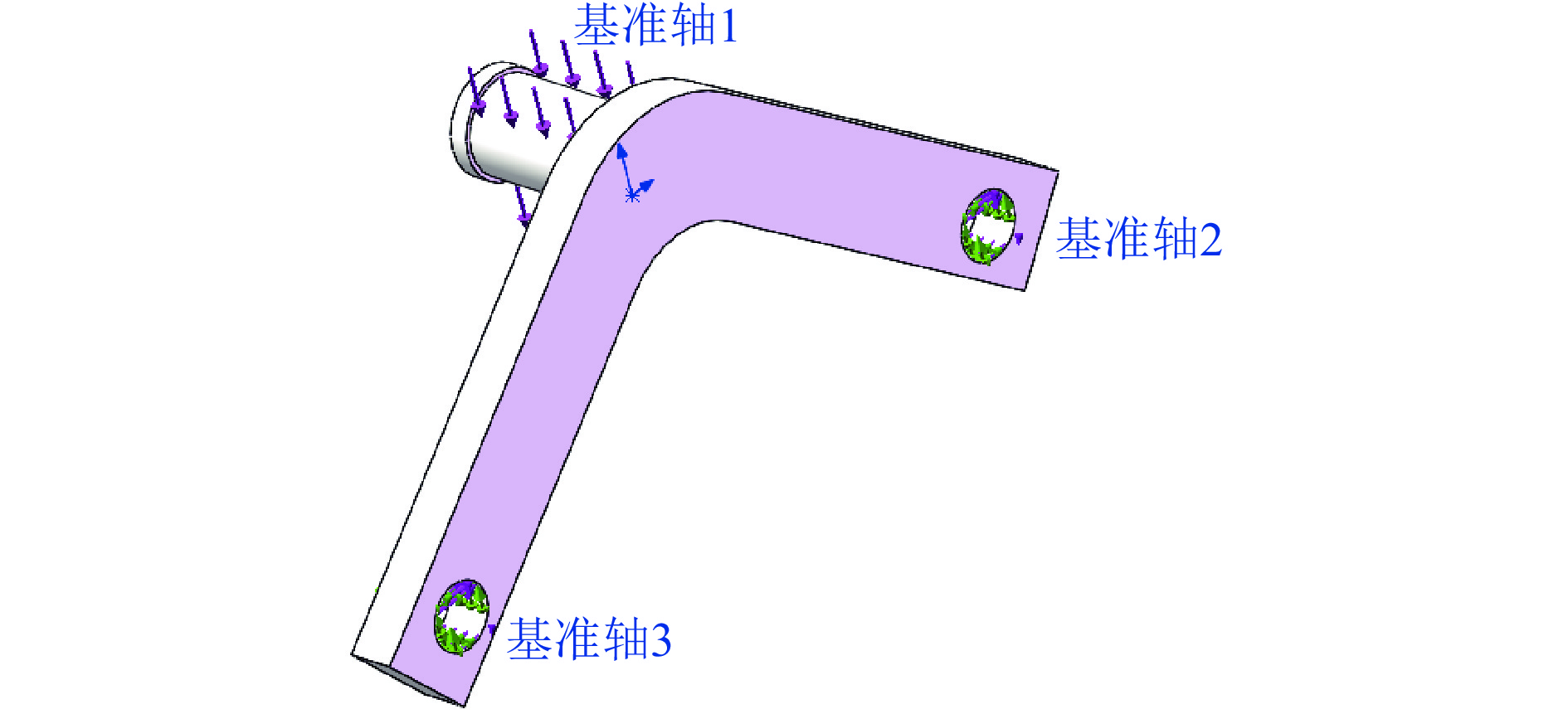
图 20 紧急制动工况下连杆的边界条件与载荷设置
Figure 20. Boundary conditions and load settings for the link under emergency braking condition
![]()
图 21 紧急制动工况下连杆的应力和位移云图
Figure 21. Stress and displacement cloud maps of the link under emergency braking condition
![]()
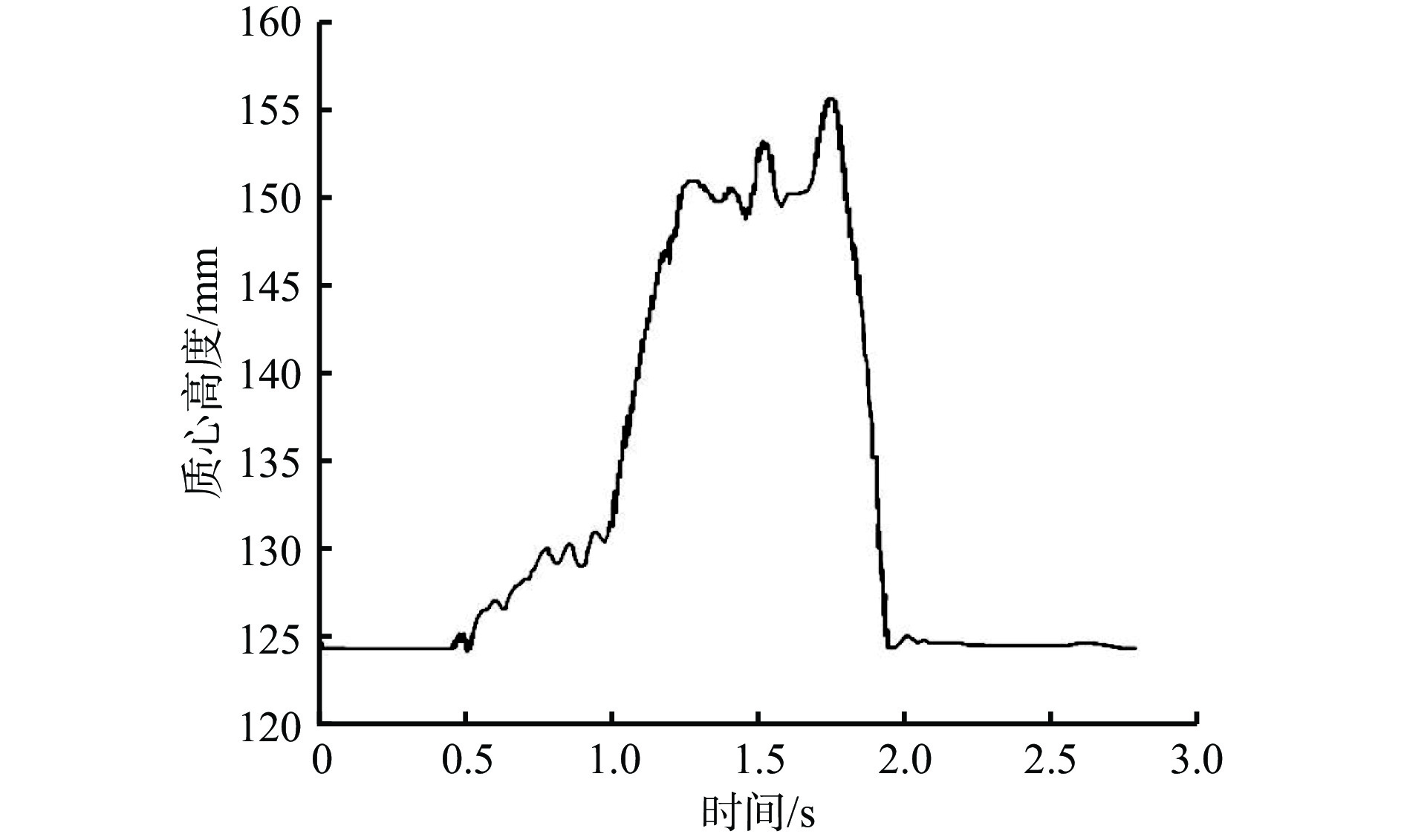
图 23 巡检机器人翻越单级台阶的质心高度检测
Figure 23. Centroid height detection of inspection robot traversing a single step
![]()
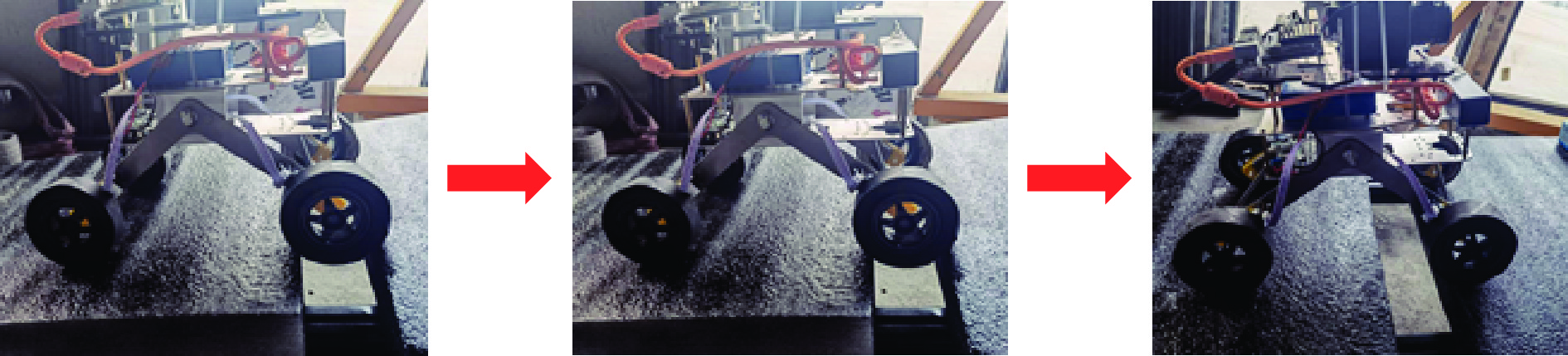
图 24 巡检机器人跨越沟道行走能力测试
Figure 24. Walking ability test of inspection robot crossing a channel
![]()
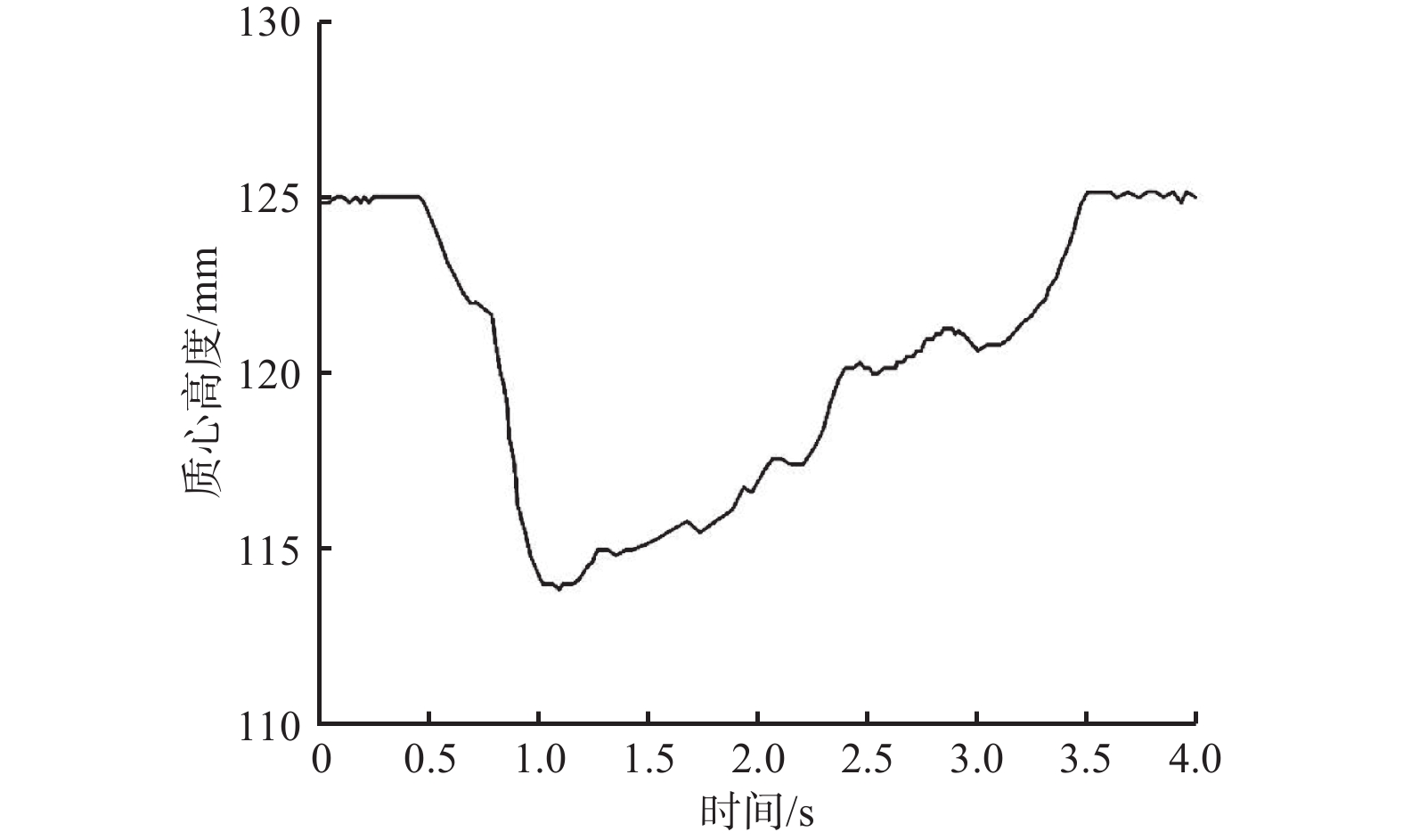
图 25 巡检机器人跨越沟道的质心高度检测
Figure 25. Centroid height detection of inspection robot crossing a channel
![]()
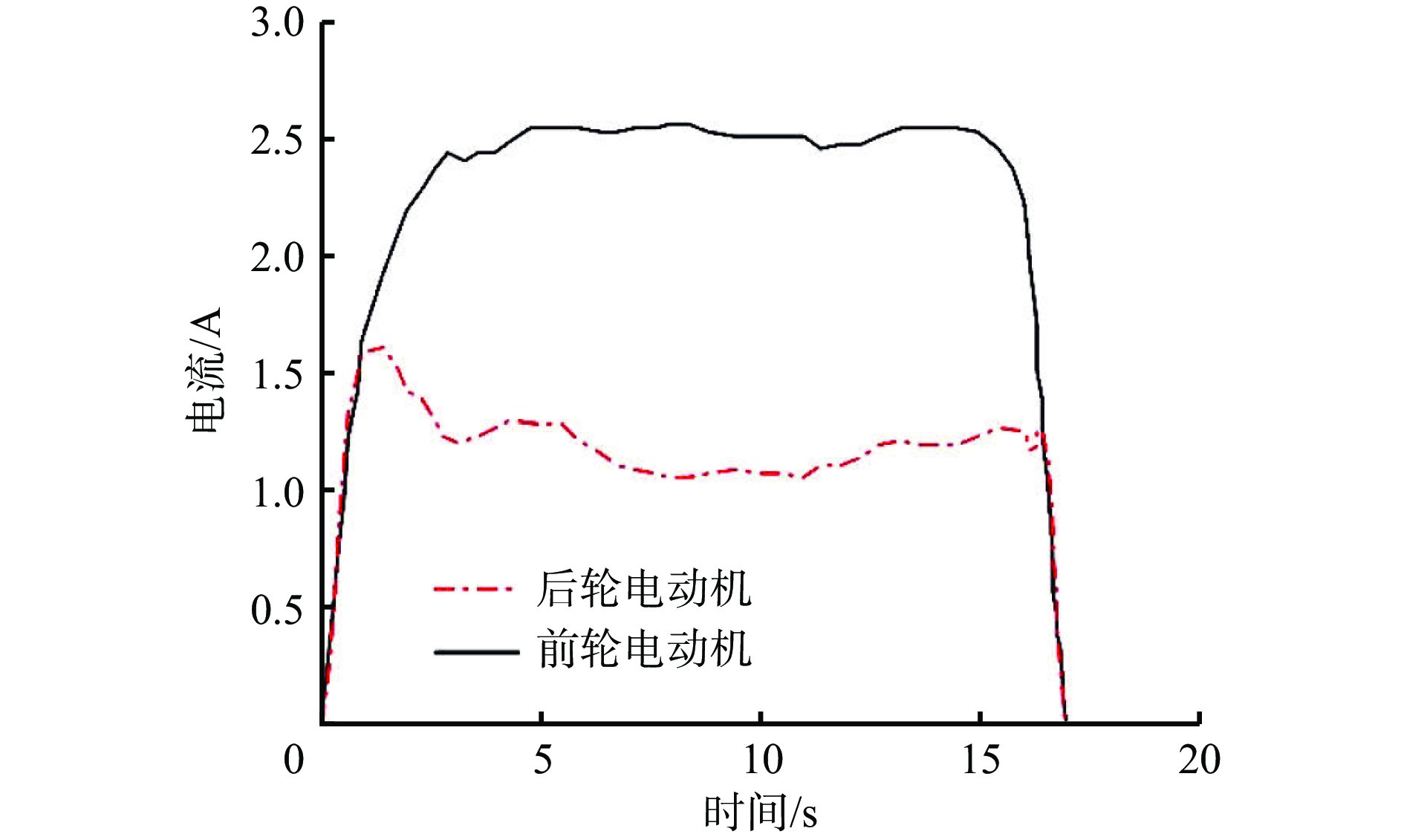
图 27 爬坡过程中前后电动机电流变化曲线
Figure 27. Current variation curve of front and rear motors during ramp climbing
表 1 常见综合评价方法优缺点比较
Table 1 Comparison of advantages and disadvantages of common comprehensive evaluation methods
综合评价方法 优缺点 德尔菲法 判断方法简单,但主观性强 人工神经网络 有较强的自学习能力与容错能力,但训练量大 层次分析法 能够有机结合定性与定量分析,但主观性强 网络分析法 可以考虑不同因素的耦合关系,但计算量大 秩和比法 可以对现有统计资料进行再分析  下载: 导出CSV
下载: 导出CSV
表 2 3种行走系统构各项行走能力值
Table 2 Walking ability values of three walking systems
行走系统类别 越障高度/mm 跨沟能力/mm 底盘高度/mm 权重 履带式 180 420 120 0.25 轮履式 200 480 240 0.32 摇臂式 200 450 275 0.42
下载: 导出CSV
表 3 3种行走系统防爆难易量化值
Table 3 Quantified explosion-proof difficulty levels for three walking systems
行走系统类别 电动机数量 车体结构 权重 履带式 4 4 0.35 轮履式 6 6 0.29 摇臂式 4 4 0.36
下载: 导出CSV
表 4 3种行走系统可靠性量化值
Table 4 Reliability quantization values for three walking systems
行走系统类别 电动机数量 离地高度 权重 驱动轮半径 履带式 4 0.3 0.29 轮履式 6 1 0.35 摇臂式 4 1.8 0.36
下载: 导出CSV
表 5 九级标度法打分细则
Table 5 Grading rules for nine-level scale method
级别 参考标准 1 同等重要 3 比较重要 5 明显重要 7 强烈重要 9 极端重要
下载: 导出CSV
表 6 越障系统性能判断矩阵
Table 6 Judgment matrix of obstacle-crossing system performance
因素 防爆难易 行走能力 可靠性 权重 防爆难易 1 1/3 5 0.34 行走能力 3 1 7 0.59 可靠性 1/5 1/7 1 0.07
下载: 导出CSV
表 7 3种行走系统的最终评价标准
Table 7 Final evaluation criteria for three walking systems
方案 防爆难易(0.33) 行走能力(0.59) 可靠性(0.1) 权重 履带式 0.35 0.25 0.29 0.27 轮履式 0.29 0.32 0.35 0.34 摇臂式 0.36 0.42 0.36 0.39
下载: 导出CSV
-
[1] 葛世荣,胡而已,裴文良. 煤矿机器人体系及关键技术[J]. 煤炭学报,2020,45(1):455-463. GE Shirong,HU Eryi,PEI Wenliang. Classification system and key technology of coal mine robot[J]. Journal of China Coal Society,2020,45(1):455-463.
[2] 马宏伟,王建科,王川伟. 煤矿巷道掘进护盾临时支护装置模块化变权模糊评价方法[J]. 西安科技大学学报,2023,43(3):576-585. MA Hongwei,WANG Jianke,WANG Chuanwei. Fuzzy evaluation method of modular variable weight for temporary supporting device in coal mine roadway[J]. Journal of Xi'an University of Science and Technology,2023,43(3):576-585.
[3] 胡而已,葛世荣. 煤矿机器人研发进展与趋势分析[J]. 智能矿山,2021,2(1):59-74. HU Eryi,GE Shirong. Coal mining robot research progress and trend analysis[J]. Journal of Intelligent Mine,2021,2(1):59-74.
[4] 国家矿山安全监察局. 《煤矿机器人重点研发目录》[EB/OL]. (2019-01-09)[2024-08-03]. https://www.chinamine-safety.gov.cn/zfxxgk/fdzdgknr/tzgg/201901/t20190109_349156.shtml. National Mine Safety Administration. Catalogue of key research and development of coal mine robots[EB/OL]. (2019-01-09)[2024-08-03]. https://www.chinamine-safety.gov.cn/zfxxgk/fdzdgknr/tzgg/201901/t20190109_349156.shtml.
[5] 王国法. 加快煤矿智能化发展建设智能+绿色煤炭工业新体系[J]. 中国煤炭工业,2020(4):8-15. DOI: 10.3969/j.issn.1673-9612.2020.04.003 WANG Guofa. Speed up the intelligent development of coal mines and build a new system of intelligent+green coal industry[J]. China Coal Industry,2020(4):8-15. DOI: 10.3969/j.issn.1673-9612.2020.04.003
[6] 李允旺. 矿井救灾机器人行走机构研究[D]. 徐州:中国矿业大学,2010. LI Yunwang. Study on mobile mechanisms for rescuerobots in underground coal mine[D]. Xuzhou:China University of Mining and Technology,2010.
[7] 赵明辉,闫东,李全,等. 矿山搜寻机器人行走机构运动系统的研究[J]. 煤矿机电,2009(4):36-38,41. DOI: 10.3969/j.issn.1001-0874.2009.04.013 ZHAO Minghui,YAN Dong,LI Quan,et al. Research on movement system of travel mechanism of mine searching robot[J]. Colliery Mechanical & Electrical Technology,2009(4):36-38,41. DOI: 10.3969/j.issn.1001-0874.2009.04.013
[8] 刘罡. 多节履带式搜索机器人及其运动策略研究[D]. 哈尔滨:哈尔滨工业大学,2011. LIU Gang. Research on a multi-linked and tracked rescue robot and its motion strategy[D]. Harbin:Harbin Institute of Technology,2011.
[9] 孙国栋,李雨潭,朱华. 一种新型煤矿救援机器人履带行走机构设计[J]. 工矿自动化,2015,41(6):21-25. SUN Guodong,LI Yutan,ZHU Hua. Design of a new type of crawler travelling mechanism of coal mine rescue robot[J]. Industry and Mine Automation,2015,41(6):21-25.
[10] 蔡李花,方海峰,高进可,等. 煤矿探测机器人行走机构设计与步态分析[J]. 工矿自动化,2017,43(6):47-51. CAI Lihua,FANG Haifeng,GAO Jinke,et al. Moving mechanism design of mine-used detection robot and its gait analysis[J]. Industry and Mine Automation,2017,43(6):47-51.
[11] 李秋生,闫小军. 履带式煤矿救援机器人行走机构研究[J]. 煤炭技术,2017,36(10):199-201. LI Qiusheng,YAN Xiaojun. Design of crawler traveling mechanism of coal mine rescue robot[J]. Coal Technology,2017,36(10):199-201.
[12] 鲍周洋. 煤矿井下巷道全方位巡检轮式机器人设计与研究[D]. 徐州:中国矿业大学,2022. BAO Zhouyang. Design and research of wheeled robot for omni-directional inspection of underground roadway in coal mine[D]. Xuzhou:China University of Mining and Technology,2022.
[13] 国家煤矿安全监察局. 煤矿安全规程[M]. 北京:煤炭工业出版社,2022. State Coal Mine Safety Supervision Bureau. Coal mine safety regulations[M]. Beijing:China Coal Industry Press,2022.
[14] 骆彬. 井下蓄电池无轨胶轮车无人驾驶系统设计研究[D]. 徐州:中国矿业大学,2019. LUO Bin. Design and research on unmanned driving system of underground battery trackless rubber-tyred vehicle[D]. Xuzhou:China University of Mining and Technology,2019.
[15] 毛浩,张建安,解云龙,等. 张家峁煤矿变电所智能巡检机器人系统设计[J]. 煤矿机械,2022,43(4):18-20. MAO Hao,ZHANG Jian'an,XIE Yunlong,et al. Design of intelligent inspection robot system for Zhangjiamao Coal Mine substation[J]. Coal Mine Machinery,2022,43(4):18-20.
[16] 鲍久圣,鲍周洋,阴妍,等. 一种井下巷道与硐室全方位巡检轮式机器人及其控制方法:202110487271.4[P]. 2021-06-29. BAO Jiusheng,BAO Zhouyang,YIN Yan,et al. A wheeled robot for all-round inspection of underground roadway and chamber and its control method:202110487271.4[P]. 2021-06-29.
[17] 周丹. 煤矿轮式移动机器人隔爆仓体与控制模式研究[D]. 北京:中国矿业大学(北京),2012. ZHOU Dan. Research on explosion-proof compartment and control mode of wheeled mobile robot in coal mine[D]. Beijing:China University of Mining and Technology-Beijing,2012.
[18] 郑学召,闫兴,郭军,等. 煤矿救灾机器人防爆技术研究[J]. 工矿自动化,2019,45(9):13-17. ZHENG Xuezhao,YAN Xing,GUO Jun,et al. Research on explosion-proof technology for coal mine rescue robot[J]. Industry and Mine Automation,2019,45(9):13-17.
[19] 巩固,朱华. 基于目标识别与避障的煤矿救援机器人自主行走[J]. 南京理工大学学报,2022,46(1):32-39. GONG Gu,ZHU Hua. Autonomous walking of coal mine rescue robot based on target recognition and obstacle avoidance[J]. Journal of Nanjing University of Science and Technology,2022,46(1):32-39.
[20] 宗成国,王海艳,于晓. 履带式煤矿搜救机器人机构设计及越障性能分析[J]. 煤炭工程,2019,51(10):123-126. ZONG Chengguo,WANG Haiyan,YU Xiao. Structure design and obstacle-surmounting performance analysis about tracked robot of coal mine rescue[J]. Coal Engineering,2019,51(10):123-126.
[21] 于翠平. 基于德尔菲法的突发公共卫生危机多主体响应指标设计评价[J]. 中国医院,2022,26(4):29-32. YU Cuiping. Design and evaluation of multi-agent response indicators for sudden public health emergencies based on Delphi method[J]. Chinese Hospitals,2022,26(4):29-322.
[22] 洪志国,李焱,范植华,等. 层次分析法中高阶平均随机一致性指标(RI)的计算[J]. 计算机工程与应用,2002,38(12):45-47,150. DOI: 10.3321/j.issn:1002-8331.2002.12.017 HONG Zhiguo,LI Yan,FAN Zhihua,et al. Caculation on high-ranked RI of analytic hierarchy process[J]. Computer Engineering and Applications,2002,38(12):45-47,150. DOI: 10.3321/j.issn:1002-8331.2002.12.017













计量
- 文章访问数: 60
- HTML全文浏览量: 21
- PDF下载量: 5
