
Study on vibration characteristics of drill rod system in a coal mine drilling robot under interlaced soft and hard inclined coal seams
-
摘要: 煤矿钻孔机器人钻杆系统振动特性的研究是钻进轨迹预测及控制的重要前提。考虑水平钻进过程中钻杆系统与煤层交互约束的复杂机制,搭建煤矿钻孔机器人钻进实验平台及振动监测系统,开展不同软硬煤层及煤层倾斜角度下的水平钻进实验;采用经验模态分解方法对采集数据进行分解、滤波和重构处理,以消除噪声干扰,进而研究软硬交错倾斜煤层下钻孔机器人钻杆系统振动特性。研究结果表明:钻孔机器人无论是在硬→中硬→软煤层还是软→中硬→硬煤层中钻进,钻杆系统的纵向、横向、扭转振动幅度均随煤层倾斜角度的增大而增大;同一煤层倾斜角度下,钻孔机器人在软→中硬→硬煤层中钻进较在硬→中硬→软煤层中钻进时,钻杆系统的纵向、横向及扭转振动幅度更大;煤层倾斜角度较小时,软硬交错煤层对钻杆系统振动特性的影响较大,煤层倾斜角度较大时,煤层倾斜角度对振动特性的影响大于软硬交错煤层的影响;较大的砂石对钻杆系统振动产生一定影响。Abstract: Research on the vibration characteristics of the drill rod system in a coal mine drilling robot is essential for the prediction and control of drilling trajectories. Considering the complex interaction mechanisms between the drill rod system and coal seams during horizontal drilling, an experimental platform and vibration monitoring system for the coal mine drilling robot were established. Horizontal drilling experiments were conducted under various layering conditions of soft and hard coal seams and different seam inclination angles. The empirical mode decomposition method was used to decompose, filter, and reconstruct the collected data to eliminate noise interference and study the vibration characteristics of the drill rod system under interlaced soft and hard inclined coal seams. The results showed that as the inclination angle of the coal seam increased, the longitudinal, transverse, and torsional vibration amplitudes of the drill rod system increased when the robot was drilling through hard→medium-hard→soft or soft→medium-hard→hard coal seams. At the same inclination angle, the vibration amplitudes in the longitudinal, transverse, and torsional directions were higher when drilling through soft→medium-hard→hard coal seams than through hard→medium-hard→soft seams. When the inclination angle was small, the interlaced soft and hard coal seams had a greater impact on the drill rod system's vibration characteristics, whereas at larger angles, the seam inclination angle had a more significant effect than the layering. Moreover, larger sand and gravel particles had a certain impact on the vibration of the drill rod system.
-
-
![]()
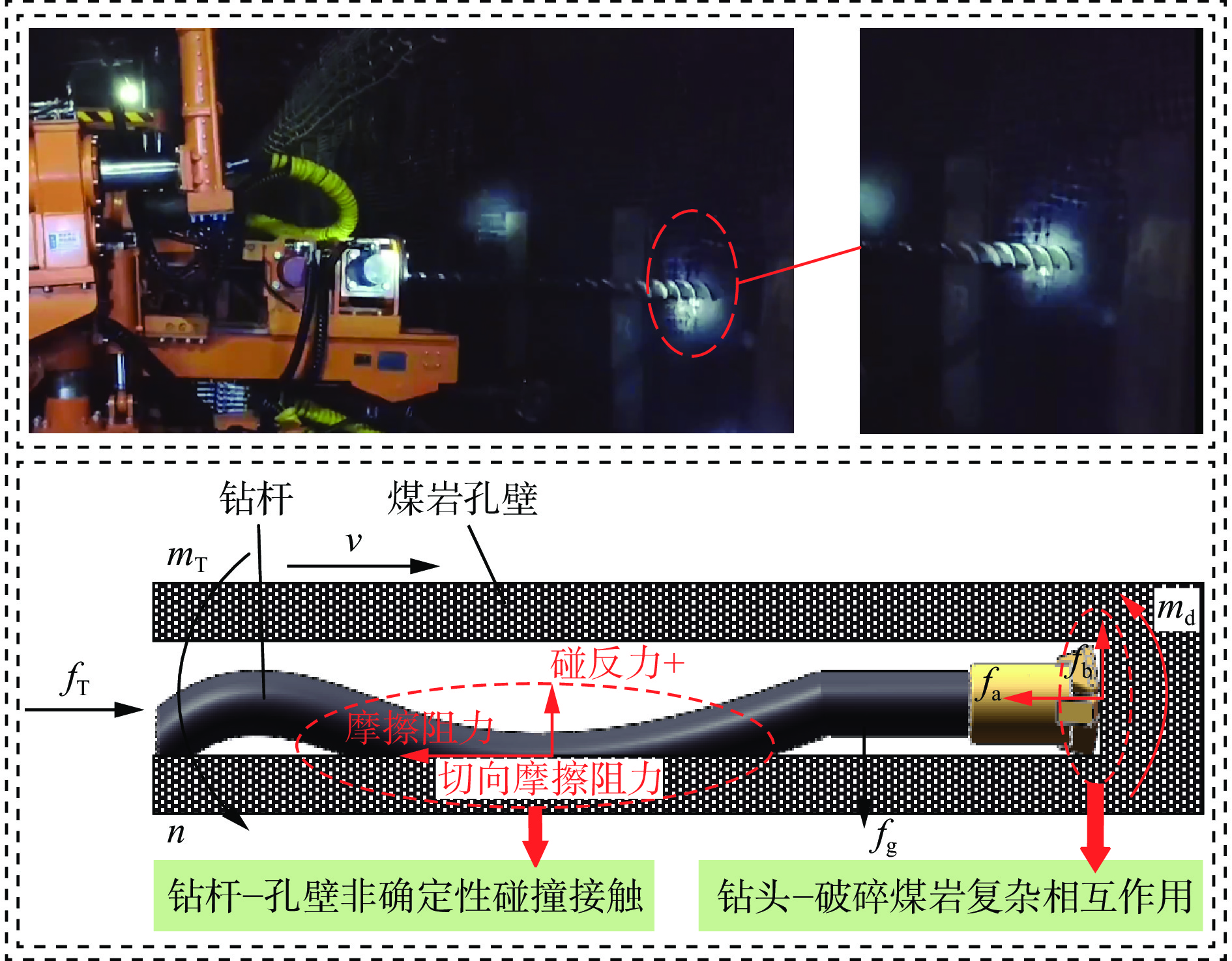
图 1 煤矿钻孔机器人水平钻进时钻杆系统动载受力分析
Figure 1. Dynamic load analysis of drill rod system in coal mine drilling robot during horizontal drilling
![]()
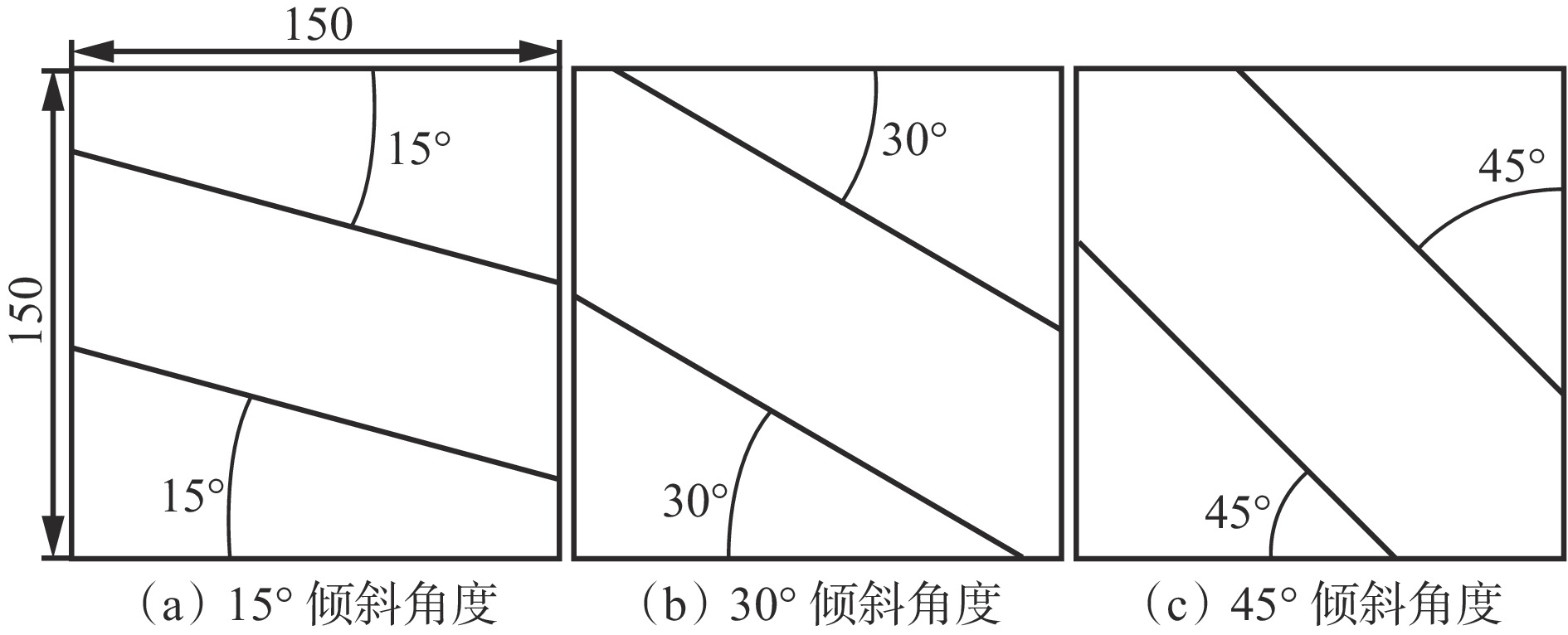
图 2 混凝土试块不同倾斜角度切割方法
Figure 2. Cutting methods for concrete trial blocks at different inclination angles
![]()
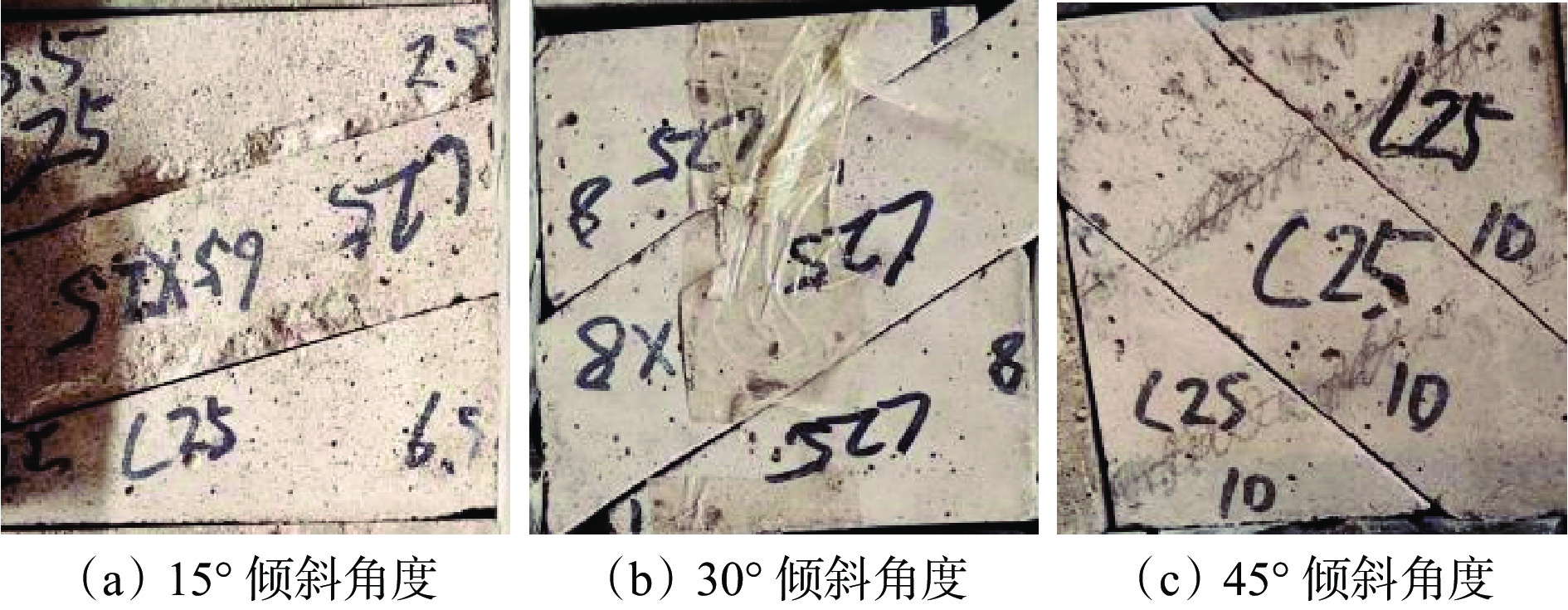
图 3 切割后的混凝土试块(以C25为例)
Figure 3. Concrete trial blocks after cutting taking C25 trial block as an example
![]()
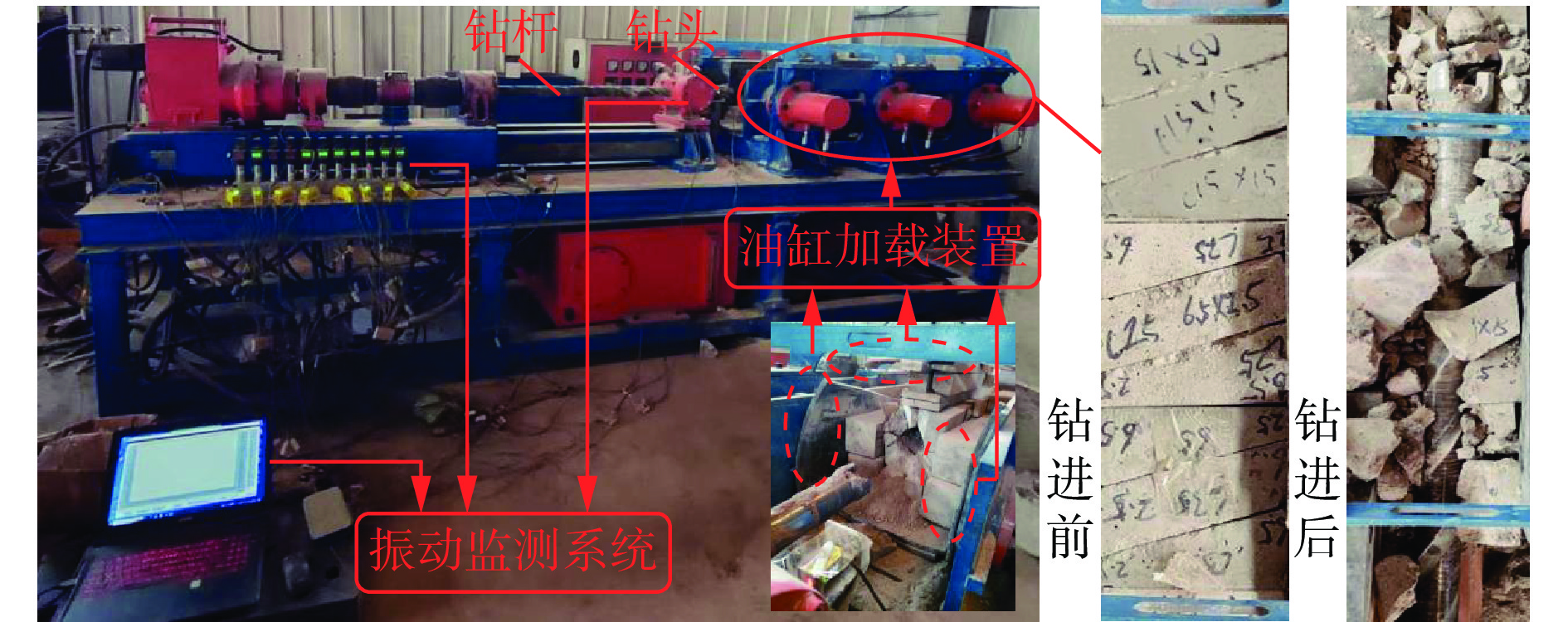
图 4 煤矿钻孔机器人水平钻进实验平台及振动监测系统
Figure 4. Experimental platform and vibration monitoring system for horizontal drilling of coal mine drilling robot
![]()
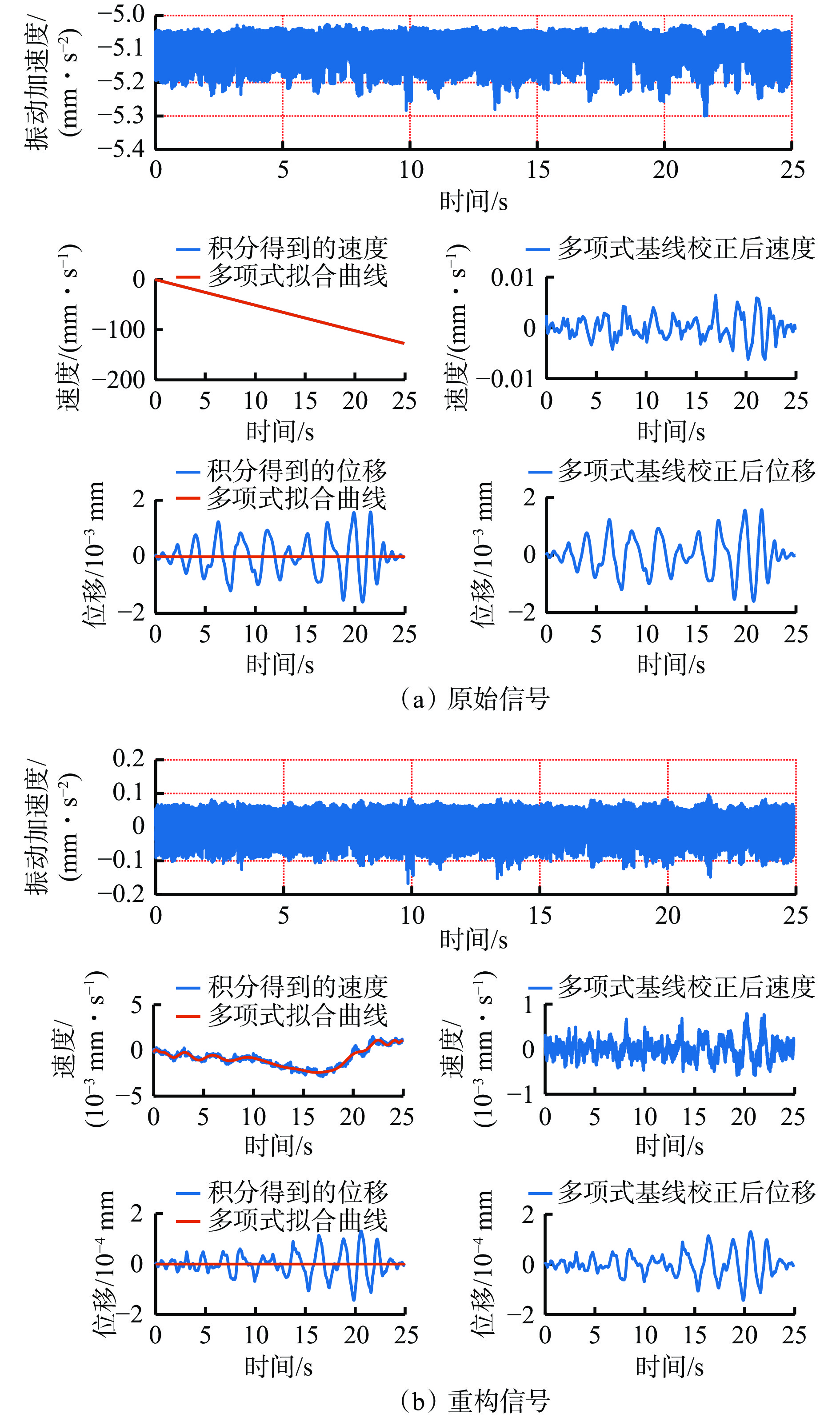
图 5 钻进方案1下钻杆系统X方向振动加速度信号处理
Figure 5. Vibration acceleration signal processing of drill rod system in X-direction under drilling scheme 1
![]()
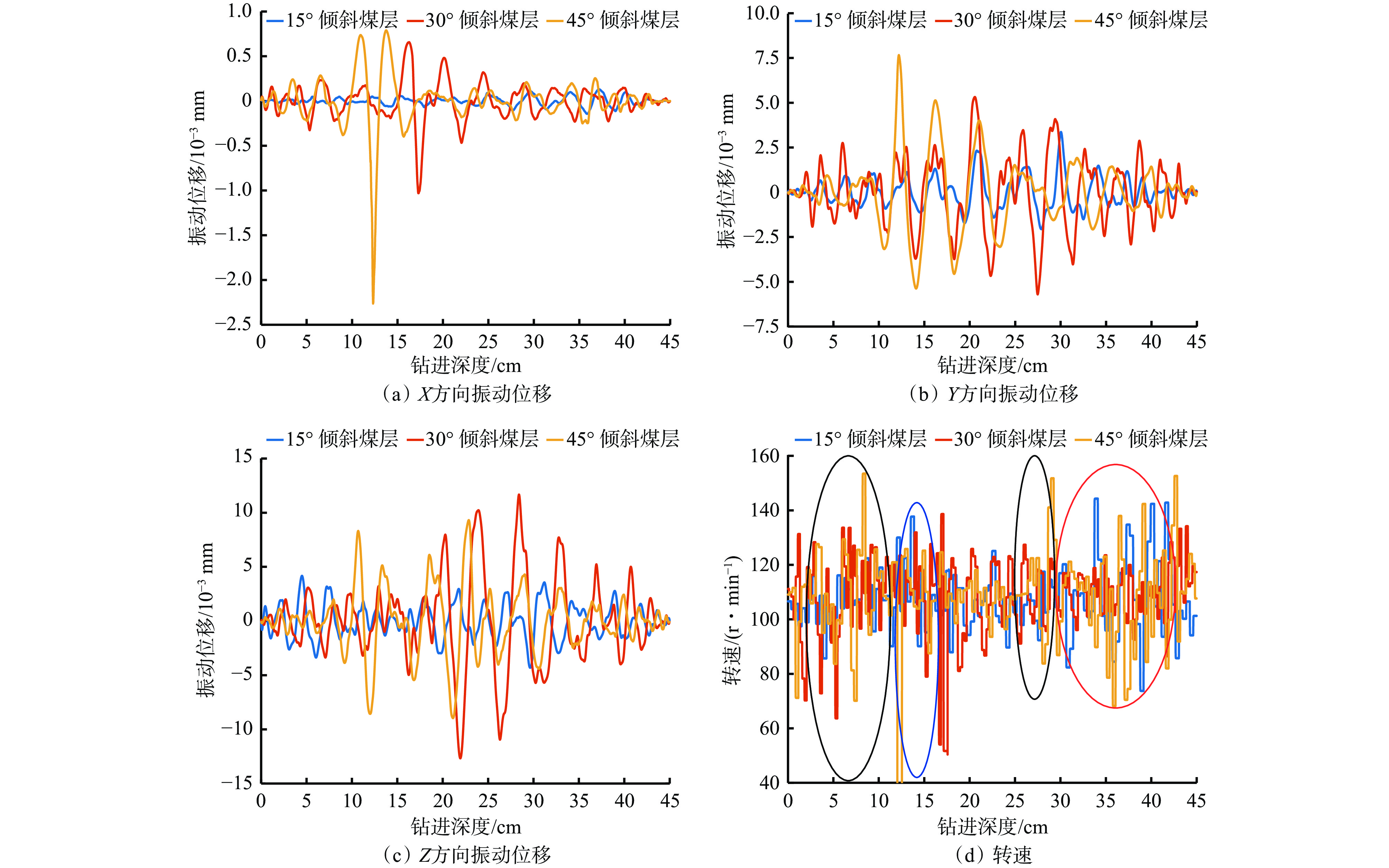
图 6 钻杆系统在软→中硬→硬煤层(C15→C25→C35)钻进过程中振动位移和转速分布
Figure 6. Distribution of vibration displacement and rotational speed of drill rod system while drilling through soft→medium-hard→hard coal seams(C15→C25→C35)
![]()
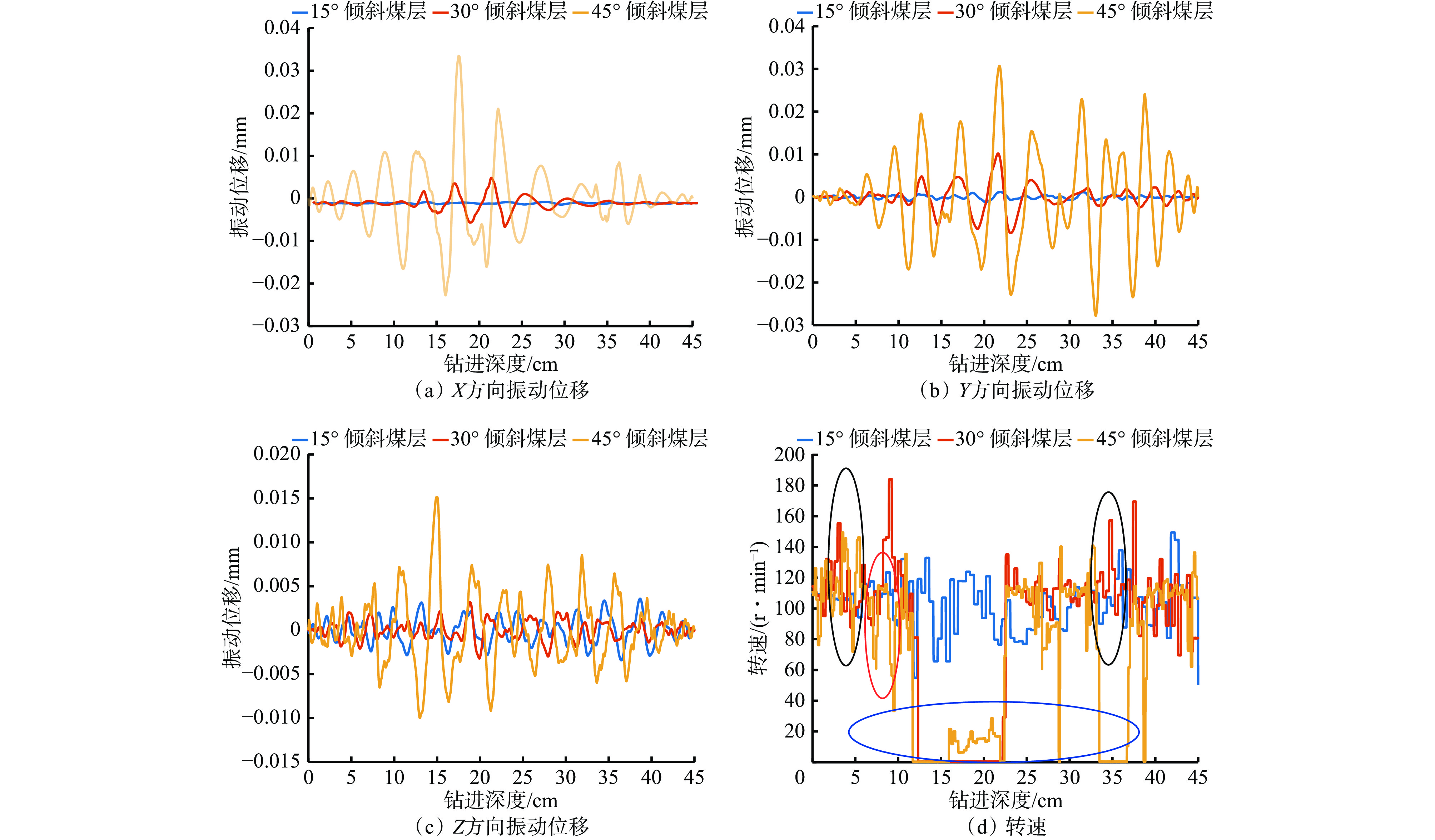
图 7 钻杆系统在硬→中硬→软煤层(C35→C25→C15)钻进过程中振动位移和转速分布
Figure 7. Distribution of vibration displacement and rotational speed of drill rod system while drilling through hard→medium-hard→soft coal seams (C35→C25→C15)
![]()
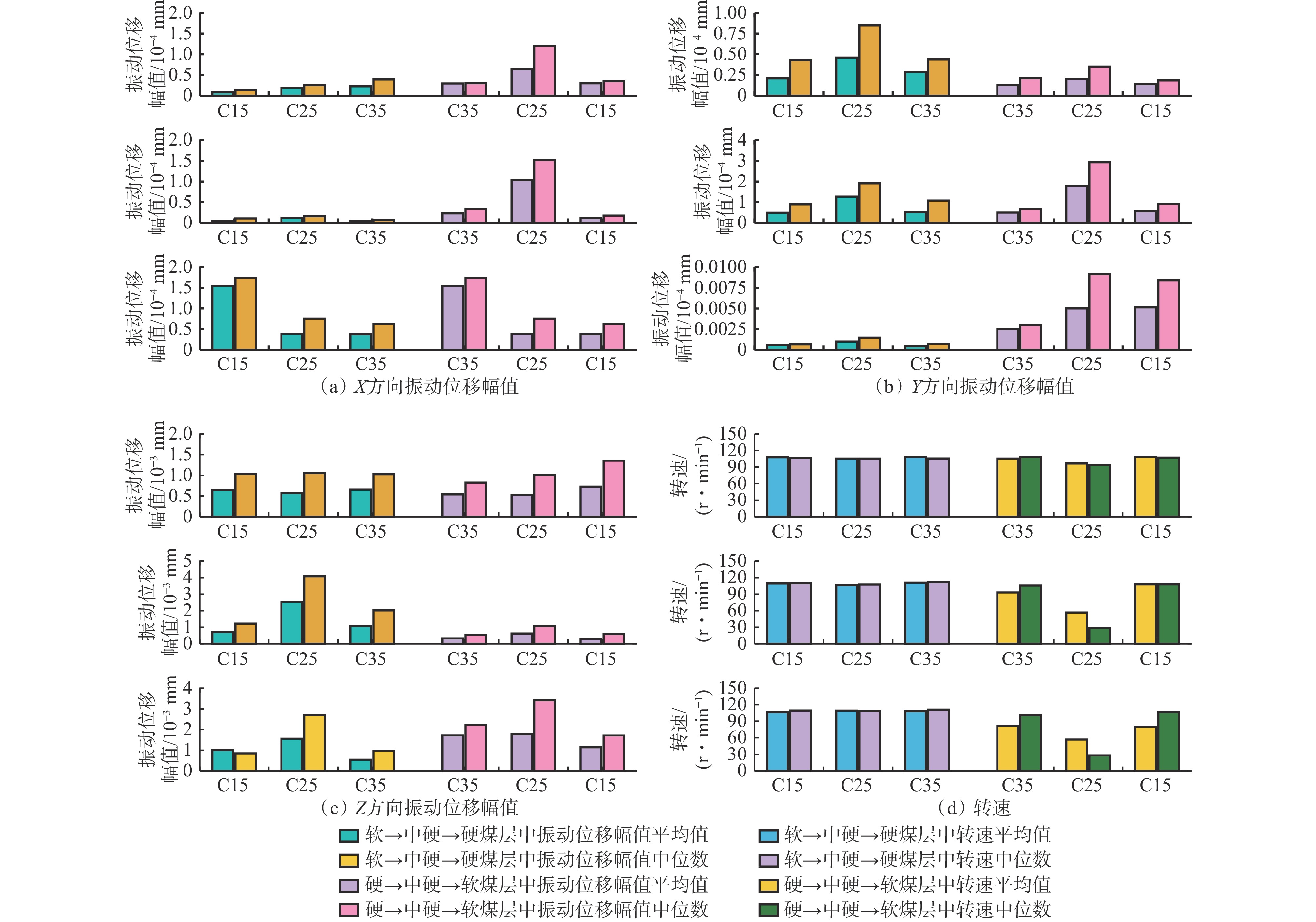
图 8 不同软硬交错煤层中钻杆系统振动位移幅值与转速的平均值和中位数对比
Figure 8. Comparison of mean and median values of vibration displacement amplitude and rotational speed of drill rod system in different interlaced soft and hard coal seams
表 1 软硬交错倾斜煤层下煤矿钻孔机器人钻进实验设计方案
Table 1 Experimental design schemes for coal mine drilling robot under interlaced soft and hard inclined coal seams
序号 煤层倾斜角度/(°) 软硬交错煤层 1 15 软→中硬→硬(C15→C25→C35) 2 15 硬→中硬→软(C35→C25→C15) 3 30 软→中硬→硬(C15→C25→C35) 4 30 硬→中硬→软(C35→C25→C15) 5 45 软→中硬→硬(C15→C25→C35) 6 45 硬→中硬→软(C35→C25→C15)  下载: 导出CSV
下载: 导出CSV
-
[1] 耿永飞. 煤矿智能化开采技术现状及展望[J]. 能源与节能,2021(9):163-164. GENG Yongfei. Current situation and prospect of intelligent mining technology in coal mines[J]. Energy and Energy Conservation,2021(9):163-164.
[2] 韩善凯. 钻杆多向耦合振动及其控制研究[D]. 天津:河北工业大学,2017. HAN Shankai. Research on multi-direction coupling vibration of drill-strings and control[D]. Tianjin:Hebei University of Technology,2017.
[3] 祝效华,曾理,李柯. 中浅层水平井钻柱振动分析及加压方案研究[J]. 振动与冲击,2020,39(23):190-201. ZHU Xiaohua,ZENG Li,LI Ke. Drill string vibration analysis and pressurization scheme for medium-shallow horizontal wells[J]. Journal of Vibration and Shock,2020,39(23):190-201.
[4] KANG Mingxia,HUA Dezheng,GUO Xiaoqiang. Review on the influence of complex stratum on the drilling trajectory of the drilling robot[J]. Applied Sciences,2023,13(4):2532-2532. DOI: 10.3390/app13042532
[5] RICHARD T,DETOURNAY E,FEAR M,et al. Influence of bit-rock interaction on stick-slip vibration of PDC bits[C]. SPE Annual Technical Conference and Exhibition,San Antonio,2002. DOI: 10.2118/77616-MS.
[6] NANDAKUMAR K ,WIERCIGROCH M. Stability analysis of a state dependent delayed,coupled two DOF model of drill-stringvibration[J]. Journal of Sound and Vibration,2013,332(10):2575-2592.
[7] LIU Xianbo,VLAJIC N,LONG Xinhua,et al. Coupled axial-torsional dynamics in rotary drilling with state-dependent delay:stability and Control[J]. Nonlinear Dynamics,2014,78(3):1891-1906. DOI: 10.1007/s11071-014-1567-y
[8] SALDIVAR B,MONDIé S,NICULESCU S I,et al. A control oriented guided tour in oilwell drilling vibration modeling[J]. Annual Reviews in Control,2016,42(4):100-113.
[9] TENGESDAL N K,HOVDA S,HOLDEN C. A discussion on the decoupling assumption of axial and torsional dynamics in bit-rock models[J]. Journal of Petroleum Science and Engineering,2020,202. DOI: 10.1016/j.petrol.2020.108070.
[10] CHOE Y M,JIN H S,KIM G S,et al. Axial-torsional mode correlation analysis of a drill string system with non-smooth characteristics[J]. Journal of Petroleum Science and Engineering,2022,218. DOI: 10.1016/J.PETROL.2022.110870.
[11] 吴泽兵,马德坤,况雨春. 钻柱纵向振动时钻头钻进计算机仿真[J]. 计算机仿真,2000(6):56-58. WU Zebing,MA Dekun,KUANG Yuchun. Computer simulation of drilling with bit's longitudinal vibration[J]. Computer Simulation,2000(6):56-58.
[12] 刘清友,黄本生. 牙轮钻头横向振动模型的建立及求解[J]. 天然气工业,2001(4):55-56,6. LIU Qingyou,HUANG Bensheng. Establishment of lateral vibration dynamic model of roller cone rock bit and its solution[J]. Natural Gas Industry,2001(4):55-56,6.
[13] 朱才朝,谢永春,刘清友. 钻头钻柱系统非线性耦合动力学仿真[J]. 兵工学报,2003(1):85-88. ZHU Caichao,XIE Yongchun,LIU Qingyou. Nolinear coupling dynamic simulation and a drill string system[J]. Acta Armamentarii,2003(1):85-88.
[14] ZHAO Jianguo,FANG Shiji,XIAO Xiaohua. Study on axial-torsional dynamics characteristics of the drilling robot based on a fluid-structure interaction model[J]. Geoenergy Science and Engineering,2023,229. DOI: 10.1016/j.geoen.2023.212108.
[15] 张冯豆. 典型复合地层钻进过程仿真及钻柱动态特性分析[D]. 武汉:中国地质大学,2022. ZHANG Fengdou. Drilling process simulation and dynamic characteristics analysis of drill string in typical composite formation[D]. Wuhan:China University of Geosciences,2022.
[16] 文国军,张冯豆,贺鑫,等. 基于Abaqus的软硬交错地层钻进过程仿真及动态特性分析[J]. 地质科技通报,2023,42(5):10-19. WEN Guojun,ZHANG Fengdou,HE Xin,et al. Drilling process simulation and dynamic characteristic analysis of soft-hard-staggered strata based on Abaqus[J]. Bulletin of Geological Science and Technology,2023,42(5):10-19.
[17] 范汉铭,陈新元. 自动垂直钻井工具纠斜液压系统的研究[J]. 液压气动与密封,2024,44(1):47-51. FAN Hanming,CHEN Xinyuan. Research on hydraulic system of automatic vertical drilling tool[J]. Hydraulics Pneumatics & Seals,2024,44(1):47-51.
[18] 邓思洪,但斌斌,容芷君,等. 混合钻头对软硬交错地层破岩特性的仿真研究[J]. 武汉科技大学学报,2022,45(1):46-52. DOI: 10.3969/j.issn.1674-3644.2022.01.007 DENG Sihong,DAN Binbin,RONG Zhijun,et al. Simulation study on rock-breaking characteristics of hybrid drill bit in soft and hard interbedded strata[J]. Journal of Wuhan University of Science and Technology,2022,45(1):46-52. DOI: 10.3969/j.issn.1674-3644.2022.01.007
[19] 王雅雪. 钻杆纵-扭耦合非线性振动的理论与数值研究[D]. 天津:河北工业大学,2021. WANG Yaxue. Theoretical and numerical research on coupled axial-torsional nonlinear vibration of drill-string[D]. Tianjin:Hebei University of Technology,2021.
[20] 张钦,宋瑞峰,李爱军,等. 预制割缝作用下TBM滚刀切削速度对岩石破岩性能的影响规律[J]. 煤炭工程,2023,55(12):203-208. ZHANG Qin,SONG Ruifeng,LI Aijun,et al. Influence of cutting speed of TBM hob on rock breaking performance under the action of prefabricated slotting[J]. Coal Engineering,2023,55(12):203-208.
[21] 张毓春. 基于深度学习模型的滚动轴承变工况故障诊断方法研究[D]. 兰州理工大学,2023. ZHANG Yuchun. Research on fault diagnosis method of rolling bearings under variable operating conditions based on deep learning model[D]. Lanzhou:Lanzhou University of Technology,2023.
计量
- 文章访问数: 56
- HTML全文浏览量: 19
- PDF下载量: 10
