
A method for estimating the step size of underground personnel based on generative adversarial networks
-
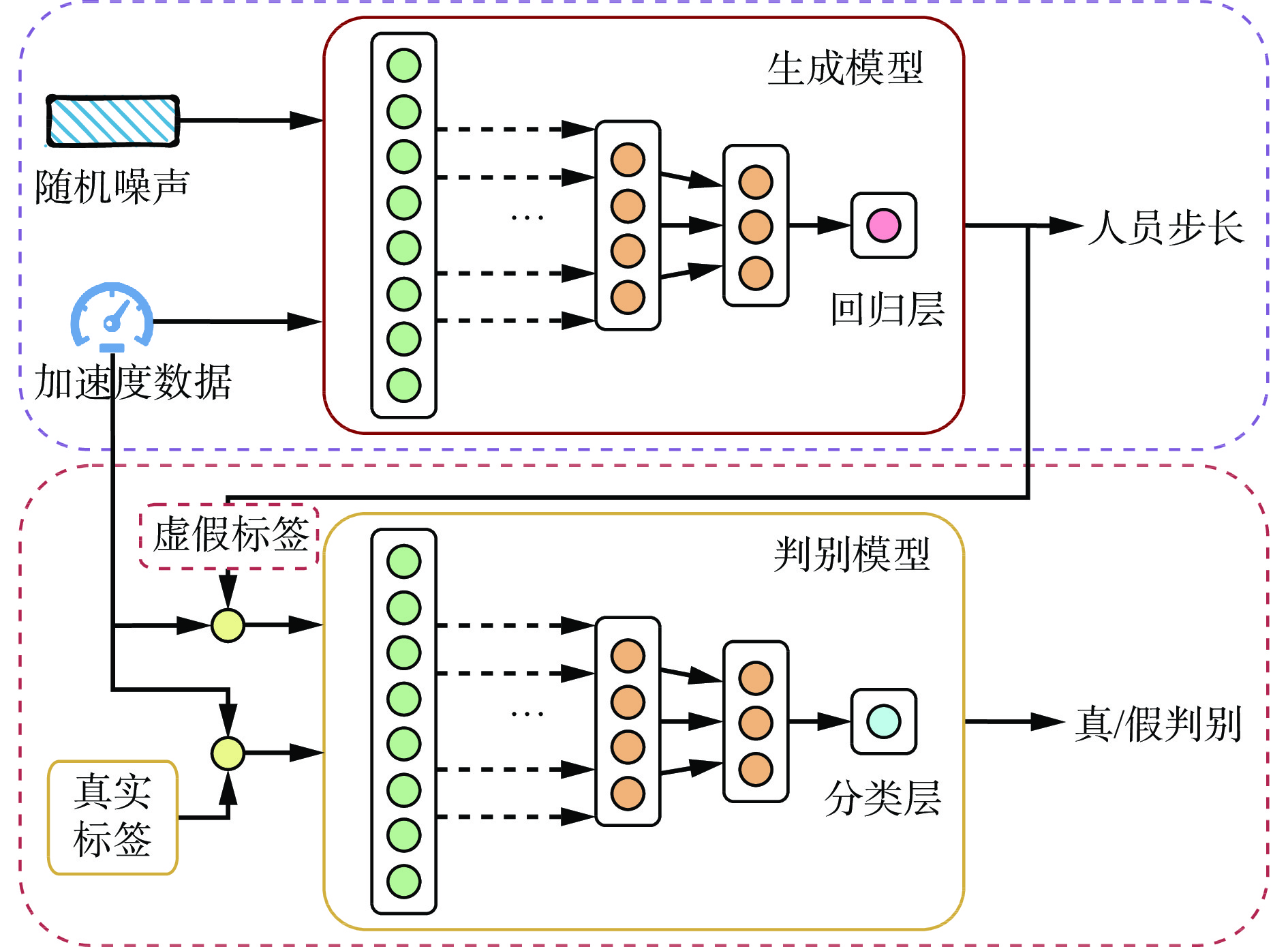
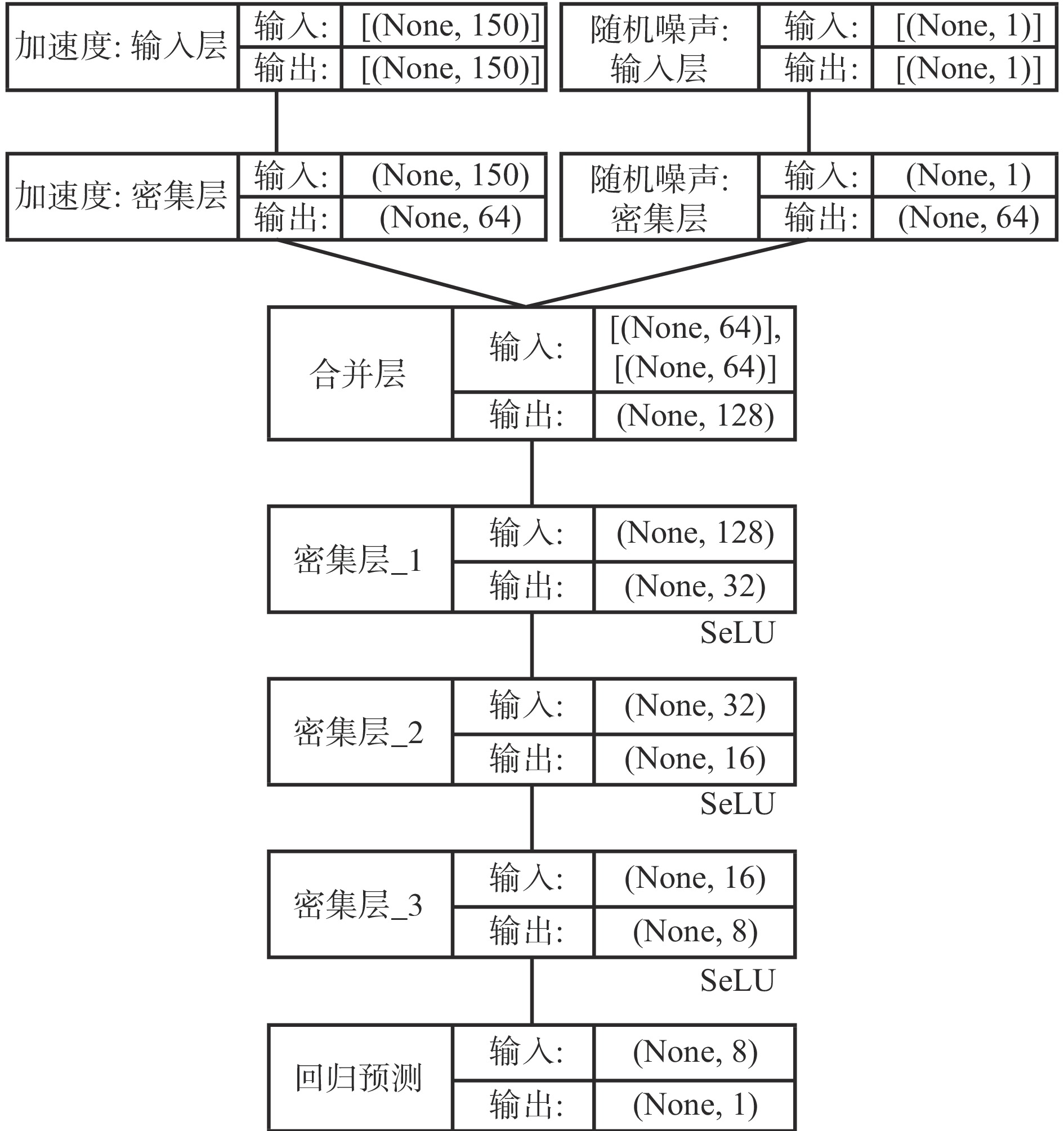
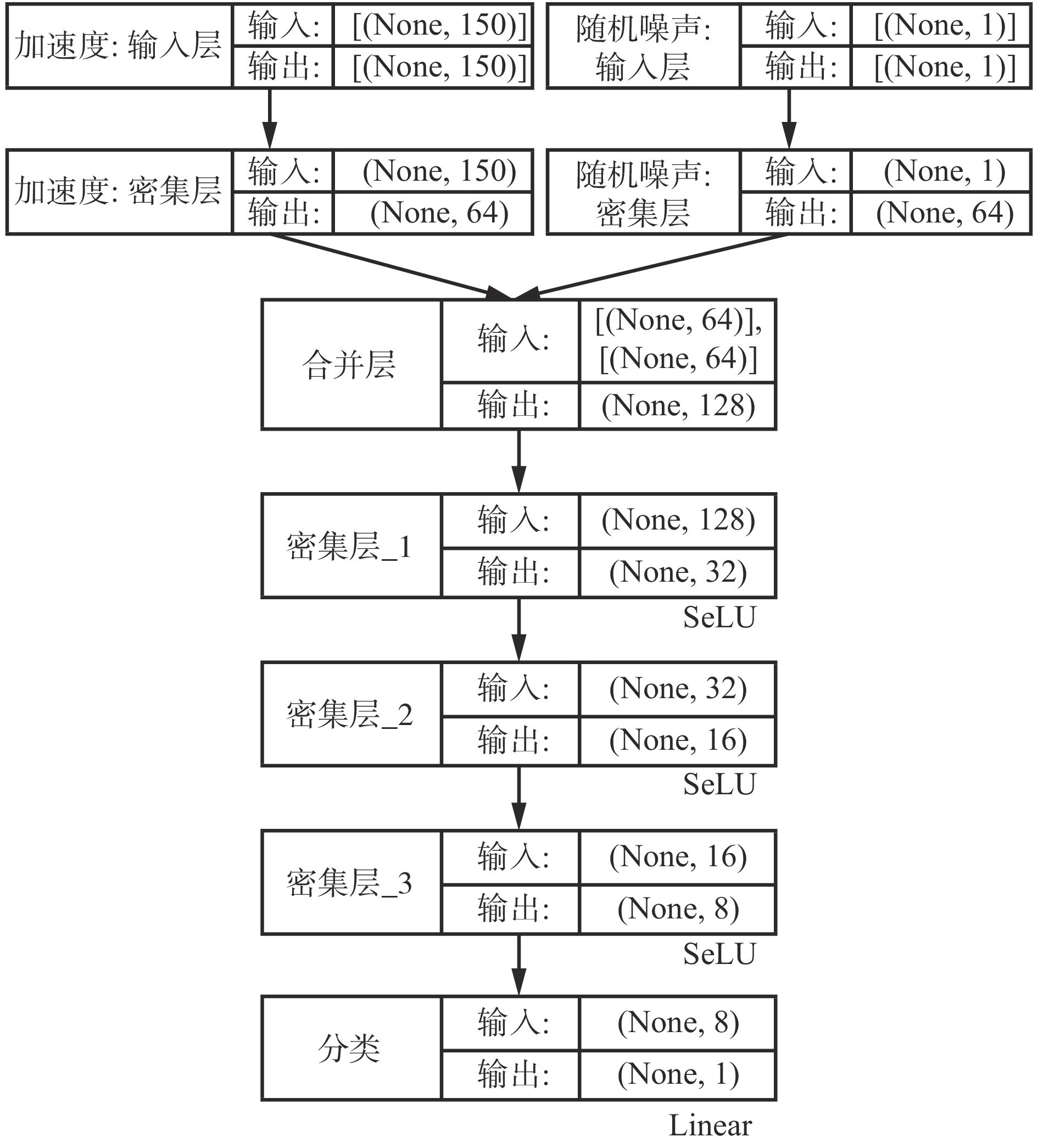
摘要: 针对基于行人航位推算(PDR)的煤矿井下人员定位系统中步长估计存在累计误差及传统深度学习方法所需数据集样本过大的问题,提出了一种基于生成对抗网络(GAN)的井下人员步长估计方法。GAN模型主要包括生成模型和判别模型2个部分,均采用深度神经网络(DNNs)实现。生成模型根据输入数据生成连续的结果分布(即标签),其输出层使用线性激活函数,以保留网络的线性特性,允许模型预测任何人员在行走过程中的步长;判别模型根据输入数据与标签判别是真实标签还是由生成器生成的标签,其输出层使用Sigmoid激活函数,以实现结果的二分类。确定生成模型与判别模型后,GAN模型联合2个模型进行训练,通过构建并优化生成器和判别器之间的动态竞争,使得生成器能够在不断迭代中学会生成更加逼真、难以区分的数据样本。实验结果表明,使用同样训练集及测试集的情况下,GAN模型的平均误差为0.14 m,标准差和均方根误差均小于DNNs模型,最小值均为0.74 m。户外测试结果表明,基于GAN的井下人员步长估计方法在上下坡场景的误差最小值为3.21%,最大值为4.79%;相比于上下坡场景,操场场景的误差更小,最大误差为1.91%。Abstract: In response to the problems of cumulative errors in step size estimation and the large sample size required by traditional deep learning methods in the pedestrian dead reckoning (PDR) based underground personnel positioning system in coal mines, a step size estimation method for underground personnel based on generative adversarial network (GAN) is proposed. The GAN model mainly includes two parts: generative model and discriminative model, both of which are implemented using deep neural networks (DNNs). The generative model aims to generate continuous result distributions (i.e. labels) based on input data. Its output layer uses a linear activation function to preserve the linear features of the network, allowing the model to predict the step size of any personnel during walking. The discriminant model aims to distinguish whether the input data and labels are real labels or labels generated by the generator. Its output layer uses a Sigmoid activation function to achieve binary classification of results. After determining the generative model and discriminant model, the GAN model combines two models for training. By constructing and optimizing the dynamic competition between the generator and discriminator, the generator can learn to generate more realistic and indistinguishable data samples in continuous iterations. The experimental results show that under the same training and testing sets, the average error of the GAN model is 0.14 m, and the standard deviation and root mean square error are both smaller than those of the DNNs model, with the minimum values being 0.74 m. The outdoor test results show that the GAN based underground personnel step estimation method has a minimum error of 3.21% and a maximum error of 4.79% in uphill and downhill scenarios. Compared to uphill and downhill scenarios, the error in playground scenarios is smaller, with a maximum error of 1.91%.
-
0. 引言
在我国能源保障体系中,煤炭依然发挥着不可替代的作用[1]。国家统计局资料显示,2022年我国原煤产量达到45.6亿t的新高,煤炭消费量在能源消费总量中的占比较2021年上涨0.2%,达到了56.2%[2]。这充分说明煤炭在保障能源安全和国民经济健康发展中是重要的“稳定器”。近期国家能源局等多部门联合发布的《关于加快推进能源数字化智能化发展的若干意见》中,明确提出了“以数字化智能化技术带动煤炭安全高效生产”的目标[3]。因此,构建匹配目前煤炭行业集约化、规模化生产的地质保障技术体系,提升矿井地质探测精度与地质信息透明化水平是煤矿智能、安全、高效生产的基础条件之一[4]。
地球物理探测技术作为矿井地质保障体系的重要组成部分,在矿井建设、生产中指导意义重大[5]。直流电法是一种常用的地球物理勘探手段,具有施工效率高、应用范围广、对水体敏感程度高等特点,在地质保障技术中扮演了重要角色。直流电法根据应用空间环境的不同可分为地面直流电法和矿井直流电法2类[6]。其中,矿井直流电法以煤岩体为研究对象,通过电阻率、极化率和自然电位等多参数测量,获取丰富的地电场参数,从不同电性角度对异常区进行分层刻画,进而实现未知地质异常体准确圈定[7]。矿井直流电法与地面直流电法差别较大,主要体现在以下方面:① 地下深部探测环境中,施工空间狭小,金属等干扰多,装备适用性差。② 井下探测对仪器设备功率、电流及响应时间等都有约束,同时涉及防爆、安全等问题[8]。因此,亟需从矿井直流电法的技术基础理论、仪器研发、数据处理和成果表达等方面进行创新研究,推动地质保障体系的进一步发展,从而服务于煤矿智能化生产。
建立快速采掘模式下与智能化发展相匹配的矿井直流电法勘探技术体系,对于煤炭智能化生产意义重大。本文概述了矿井直流电法的原理、发展历程,并对技术应用进行了分类,总结了矿井直流电法在工作面顶底板探查、巷道超前探测及工作面内探查的应用和仪器设备发展情况。基于此,讨论了矿井直流电法探测技术在目前工程应用中的优缺点。建议从构建地电场数据响应特征库、多源数据融合解释与联合反演方面入手,提高矿井直流电法成像的精度与解释标准,并建立矿井直流电法动态智能化监测体系,助力煤矿智能化发展。
1. 矿井直流电法探测技术
1.1 基本原理
矿井直流电法以电阻率法为基础,通过对地下人工建立的地电场分布特征进行观察和研究,获得煤岩体及异常体的电性差异响应。以低阻体为例,矿井直流电法探测原理如图1所示。
构建人工电场,通过供电电极供入电流,获取电位信号差,计算待测煤岩体视电阻率 [9]:
$$ \rho _{\rm{S}}^{{\rm{AB}}} = {K_{{\rm{AB}}}}\frac{{\Delta {U_{{\rm{MN}}}}}}{I} $$ (1) 式中:${\rho }_{{\rm{S}}}^{{\rm{AB}}}$为视电阻率,Ω·m;$ {K}_{{\rm{AB}}} $为测量装置的装置系数;$ {\Delta U}_{{\rm{MN}}} $为测量电极所检测到的电位差,V;I为供电电流,A。
1.2 技术发展历程
早在20世纪50、60年代,苏联学者采用直流电法技术开展煤矿井下勘探,并在长期的实践中积累了丰富经验。我国在1958年由煤炭部地勘司在北京京西矿区万福堂平硐进行了井下直流电法试验,取得了较好的富水区探查效果。之后在京津冀、两淮等多家矿务局相继开展井下试验工作,推动了矿井直流电法的初步发展[10]。20世纪80年代后期,煤炭开采产量增加,水害问题日趋严重,以中国矿业大学、煤炭科学研究总院西安分院、河北邯郸峰峰矿务局等为代表的单位着重关注到矿井直流电法的理论、装备等研究工作。20世纪90年代我国东部矿区煤炭开采规模化发展,国内诸多研究单位从矿井直流电法理论、技术和现场试验与应用等方面开展了大量工作。期间,中国矿业大学首次将高密度电法技术应用于井下底板突水构造探查。另外,河北煤炭科学研究所、邯郸矿务局等单位还进行了矿井直流电法超前探测试验[11-12]。这一阶段,矿井直流电法勘探工作的测线布置、数据采集与分析等环节愈加标准、规范。一些具有矿井特色的直流电法测试方法被用于井下生产地质保障工作中,例如岩体电阻率法、层测深法、直流电透视法及超前探测技术。
进入21世纪后,煤炭行业迎来黄金十年(2002—2012)快速发展期,在国家重大科技战略支撑下,国内多家高校、研究院、煤矿企业等相关单位投入大量时间与精力进行矿井直流电法的理论研究、技术应用、仪器研发等工作。其中代表性的有中国矿业大学岳建华等学者完成的《矿井直流电法勘探》一书,系统总结了矿井直流电法理论和应用等方面的研究,安徽理工大学研发的并行电法技术也极大地保证了煤矿安全高效开采[13-14]。
近年来,5G、物联网和相关软硬件技术的提升促进了矿井直流电法仪器的小型化与智能化,现已初步实现了远程智能化动态监测[15-16]。同时,有学者尝试将矿井直流电法与随掘随采技术相结合,实现采−探、掘−探同步推进,取得了显著成效[17-18]。矿井直流电法简要发展历程如图2所示。
1.3 技术分类
根据场源、解决的工程问题、探测的方式等,矿井直流电法延伸出了一些更为细致的分支,可细分为电测深法、电剖面法、高密度电阻率法、网络并行电法、直流电透视法等。常见的矿井直流电法分类见表1。
场源性质 测试方法 技术原理 技术特点 应用领域 天然场源 自然电位法 通过研究自然电场分布规律达到找矿或解决其他地质问题的目的 测试方式简单,无需向被测体供电 矿井采掘围岩破坏规律研究、地下水渗流探查等 人工场源 充电法 对被测地质体充电,并观测充电电场的分布,从而推断地质体赋存情况 测试方式较简单,工作量小,但应用条件受限制,即被测体为良导体,且其围岩的电阻率稳定 早期多用于找煤工作 时域激电法 以岩矿石极化率为基础的人工源勘探方法 仪器设备较笨重,采集信号受井下环境干扰 早期找水方面应用较多 直流电透视法 与矿井无线电透视原理类似,采用直流供电,研究巷道及工作面电场变化规律 现场测试需两巷道配合采集工作,对现场测试环境要求较高,工作量较大 探测工作面内部及其顶底板围岩体的含水构造等 电测深/电剖面 通过布设4道电极并改变电极间距离,获得电测深或电剖面数据 工作量大,测试效率低,数据量少 最初电法勘探中该方法使用较多,目前该方法难以满足实际测试需求 高密度电法 集电测深法和电剖面法于一体的阵列式智能勘探方法 现场施工方便,测试速度快,精度高,对富水区等异常响应灵敏 可探测工作面内部及其顶底板围岩体的含水构造,进行巷道超前探测,可通过孔−孔、孔−巷等布置方式对工作面顶底板破坏范围进行监测 网络并行电法 采用拟地震式的数据采集方式,解决常规直流电法仪器存在的无法串行采集等问题 超高密度电法 采用一次布极,采集所有可能组合电极间的电位信息,并且避开视电阻率概念,利用处理软件直接反演获取断面真电阻率 主要以地面应用为主 2. 矿井直流电法技术应用现状
矿井直流电法主要应用于顶底板探查、煤层内构造探测和巷道超前探测等,其原位测试方式从单一的巷道测试发展为孔−巷、孔−地、孔−孔等井下或井上下多样化的联合测试方式,同时,针对不同地质条件、不同探测目标下的矿井直流电法技术与装备正在不断发展与完善。
2.1 煤层顶底板探查
顶底板的富水性探查和采场围岩破坏发育特征研究是煤炭安全生产全过程关注的重点和难点[21]。顶底板发生突水灾害往往是因为顶底板受采动影响而产生破坏变形,降低了隔水岩层的原生强度和完整性,形成水害导水通道。矿井直流电法对水体响应敏感,同时在采场围岩变形中顶板“上两带”(垮落带、导水裂缝带)和底板 “下三带”(导水破坏带、有效隔水层保护带和承压水导升带)区域的岩体破坏程度不同,导致电阻率的变化不同[22-24],奠定了其物性的探查基础。
通过对孔、巷的充分利用,优化既有的观测模式,在工作面回采过程中获得顶底板动态监测结果,圈定富水异常区。采用单孔/单巷观测方式,通过在顶底板钻孔或单巷中布设电极,获取不同回采时间段的二维电阻率剖面,能直观表现出顶底板岩层结构与动态破坏特征。在通过矿井直流电法判识工作面“上两带”高度和“下三带”破坏深度方面,相关学者开展了大量探索性工作,取得了一定效果。张平松等[25-26]基于并行电法技术,通过对孔巷的充分利用,进行顶板三维动态监测,由此判断回采过程中顶板垮落带和导水裂缝带的高度。施龙青等[27-28]将三维高密度电法技术用于顶板富水性探查,通过在进风巷、切眼、回风巷布设三维观测系统,得到不同开采过程中的三维电阻率成像过程,直观表现出顶板水分布情况。在数据解释与处理方面,杨海平等[29]、鲁晶津[30]重点关注顶底板受煤层采动破坏过程中的电性响应特征,旨在为顶底板直流电法测试数据解释提供参考。翟培合等[31]基于现场勘探数据构建了光滑约束最小二乘法耦合正则化约束的反演模型,提高了反演的泛化能力和成像精度,进而提高了高密度电法在煤矿顶板探水应用中的准确性。胡雄武等[32]基于单巷与双巷透视法优缺点,通过三极左与三极右联合反演,提出了视电阻率全方位探测方法,用该方法得到底板灰岩水相对低阻区分布结果,如图3所示。
在探查顶板过程中,若遇到巷道过高、顶板岩体坚硬等问题,电极布设难度增大,导致施工效率低下,同时还可能影响电极与煤岩体的接触。因此,鲁晶津等[33]尝试用顶板锚杆作为电极,在去除锚杆电极附近金属干扰物后,开展了锚杆电极的可行性研究。温亨聪等[34]提出了一种适用于工作面顶板的电法赋水性探测系统,包括顶板电法探测网络、高空电极伸缩探测杆、海绵耦合套等,极大地优化了顶板电极布设,促进了基于矿井直流电法的顶底板探测技术的进步。
2.2 巷道超前探测
据不完全数据统计,我国煤矿的巷道年掘进累计量达到上万千米,而且巷道掘进事故在矿井安全事故中的占比超过40%[35]。由于受地质“黑箱”影响,除了降低掘进效率外,还容易受到前方隐伏岩溶、陷落柱等地质灾害体的威胁,并且当前快速掘进模式下要求巷道超前预报更加实时和精准。相关高校及科研单位重点围绕巷道前方地质构造、岩层含水性两大地质灾害开展矿井直流电阻率法超前探测工作,进行了广泛深入的研究[36-41]。
目前,用于巷道超前探测的直流电法主要有直流三极法、直流聚焦法2种,其中直流三极法及其改进方法更为常见,直流聚焦法多用于隧道超前探测,在煤矿深部地层应用较少。为了获得较好的探测效果,提高巷道前方含水异常体综合辨识和预测能力,优化或改变观测方式是常用的方法。周官群等[42]将3个超前探水钻孔设计为互成28°的“三角锥”型观测系统,利用孔中三维直流电法进行突水灾害超前探测正演模拟。张平松等[43]在三点源布置基础上,利用并行电法测试装备实现多极覆盖,构建了矿井直流电法孔−巷超前观测系统,提高了巷道前方地质异常体的探测精度。王敏等[44]采用直流电法二极“U”型超前探测装置对某矿掘进巷道前方断层富水性进行探测,取得了较好的应用效果,电阻率反演断面如图4所示,可看出该装置对低阻异常区的圈定效果较佳。在数据解释与处理方面,刘洋等[45]利用电阻率三维非结构有限元数值模拟,给出了巷道超前探测的线性预测模型,然后引入Monte Carlo 随机化生成大量电阻率任意分布的地下巷道模型,与并行算法相结合,获得了各预测模型的准确度及可靠性估计,从数据处理与解释方面为巷道超前探测准确性和可靠性的定量化描述提供了新思路。
近年来,隧道掘进机(Tunnel Boring Machine,TBM)被引入矿井巷道掘进中,显著提升了巷道施工速度和效率。然而相对应地,也给巷道前方地质灾害探查预报工作带来了更为严峻的挑战。开展随掘探查成为巷道快速智能掘进探测技术的研究重点。其中,随掘电法超前探测是在盾构机掘进施工过程中,以移动刀盘为测量电极,后方墙体内锚杆作为接地电极,对TBM护盾通入保护电流,进而构成移动阵列超前观测系统,同步进行数据采集与处理,实现对前方地质体的实时预报[46-47]。
2.3 工作面内异常区探查
回采工作面地质构造是影响采煤效率的主要因素之一。回采工作面内存在隐伏含/导水构造未被揭露时,在煤层采动影响下易形成导水通道。因此,可利用陷落柱、岩溶等含/导水构造与围岩的电性差异,采用矿井直流电法圈定工作面内异常区[48]。在观测方式方面,牟义等[49]、陈继福等[50]通过巷−巷布设方式在工作面内部区域应用音频透视技术进行含水体圈定,该技术施工便捷、测试效果显著,能够有效地为矿井水害防治提供依据。某矿音频电透视三维反演成像结果如图5所示,获得了前方岩溶陷落柱分布情况。在数据解释与处理方面,曹强[51]针对2个巷道间工作面内的异常体反演问题,研究了巷道间电阻率法三维共轭梯度反演理论,成功避开直接求取雅克比矩阵,通过解“拟正演”问题直接获得雅克比矩阵与一任意向量的乘积及其转置与一任意向量的乘积,为回采工作面三维电阻率法的反演提供了新思路。
![]()
2.4 矿井直流电法仪器与设备研发进展
针对矿井直流电法仪器短缺问题,相关高校与科研单位投入大量的时间和精力开展仪器装备研发工作,探测装备从大功率、高功耗逐渐向便携化、自动化、智能化的方向发展。
煤炭科学研究总院西安研究院最早于1992年研发了适用于井下的DZ−Ⅱ型防爆数字直流电法仪器,填补了国内矿井直流电法仪器的空白[52]。进入21世纪以来,矿井直流电法勘探仪器日趋小型和轻便,各个科研院所和企业相继研发了众多矿用直流电法仪器。中煤科工集团重庆研究院有限公司成功开发了矿用高密度电法仪。刘盛东等[14]设计了分布式并行智能电动机电位差信号采集方法和系统,研发出首款矿用并行电法仪并投入生产使用。
随着仪器设备水平不断提高,矿用电法勘探装备初步实现了智能化动态监测,并由单一物探设备向集成化监测系统发展。王冰纯[53]研发了回采工作面电阻率监测系统,利用光纤和互联网进行远程控制和数据传输,开发了数据实时处理软件和动态成像系统。靳德武等[54]提出了集多频连续电法充水水源监测、“井−地−孔”联合微震采动底板破坏带监测及监测大数据智能预警为一体的煤层底板突水三维监测与智能预警技术。较为常见的几类矿井直流电法仪器功能及特点见表2。
表 2 常见矿井直流电法仪器功能及特点Table 2. Functions and characteristics of common DC electrical instruments in mines仪器名称 功能 仪器特点 YD32(A)矿用高分辨率电法仪 具有电测深、电剖面和超前探测等功能 大功率输出增加了探测距离,实现了超前探测的电极全自动切换 YDZ(A)直流电法仪 体积小、施工方便、性能稳定可靠,YDZ(B)型抗干扰能力较强 YDZ(B)直流电法仪 YDZ24矿用本安型直流电法仪 具有电阻率法、自然电位法探测等功能 主从机设计,配备高清触摸屏,可以根据需求增加仪器道数 YDE24矿用本安型地震电法仪从机 具有电阻率法、自然电位法和地震单分量或多分量地震数据采集 YDZ32矿用直流电法仪 具有电测深、电剖面和超前探测法功能 测量精度高、抗干扰能力强,探测结果为2D图,成果解释直观 YDG64矿用高密度电法仪 具有高密度电法采集功能 YDZ16(B)矿用多道并行直流电法仪器 具有自然电位法、电测深、电剖面法、超前探测等功能 多通道设计且在采集过程中电极可以自动切换 YBT96矿用交直流并行电法透视仪 可实现双巷高密度电透、多频电透、三维全透视 除发射电极外,其他的电极参与同步接收,实现同源、同场观测 YDZ75(A)矿用本安型并行直流电法仪器 具有自然电位法、电测深、电剖面法、超前探测等功能 接收、发射、电源系统一体化设计,采集速度快,抗工频干扰、随机干扰能力强 YDJ256−03矿用浇筑兼本安型高密度电法仪 具有高密度电法采集功能 集电源、数据采集和成图于一体,且可一键完成测量 YBD12矿用本安型网络电法仪 具有电阻率法、自然电位法、充电法、激电法(时间域和频率域)等探测功能,YSD11增加了多分量地震勘探功能,YZD11增加了多波多分量地震探测功能 具有一键成图模式,配备高清触摸屏,可以实时显示视电阻率剖面图、视极化率剖面图等 YSD11矿用本安型微震电法仪 具有一键成图模式,配备高清触摸屏更加智能,但主机和基站独立增大了工作强度 YZD11矿用本安型槽波地震电法仪 YDZ24矿用本安型直流电法仪 具有电阻率法、自然电位法探测等功能 主从机设计,配备高清触摸屏,可以根据需求增加仪器道数 YDE24矿用本安型地震电法仪从机 具有电阻率法、自然电位法和地震单分量或多分量地震数据采集 3. 存在的问题
矿井直流电法经过60余年的发展,技术和装备水平得到显著提升,但在解决工程问题上依然存在很多难题,特别是测试环境的变化带来很多新挑战。
1) 目前矿井直流电法超前探测技术主要以球壳理论为基础进行含/导水构造体探查工作,而实际井下地质情况复杂,且在全空间三维地电条件下探测存在较强的体积效应,在含/导水异常体圈定空间的定位精度低,同时存在有效探测距离不足的问题。含/导水异常体探查研究多从单一、简单构造出发,与测试地质环境的结合不密切,未给出多种复杂含/导水构造地电场响应特征对应关系,使得地电场响应特征不明确,缺乏系统归纳。此外,对全空间基础理论的研究不够深入,煤炭深部化开采与西部矿井地质条件差异大,一些基础理论与应用适应性变差,亟需进行完善。
2) 矿井直流电法施工空间狭小,在有限的测试空间内,多方位地质异常体电性响应叠加,增加了数据处理和解释难度。异常识别效率和测试结果的多解性长期以来未得到很好解决。另外,矿井直流电法现场施工自动化、信息化水平不高,限制了其在随采、随掘、随探、随落等方面的应用,加上导致探测结果多解性的原因复杂,如何优化施工方式,提高施工效能,实现矿井直流电法高速采集与处理是热点问题。目前,多地球物理探测技术联合测试成为趋势,获得大量原位数据之后,开展数据融合解释,进行多方法的相互验证,以提高探测精度,该问题需进一步深入探究。
3) 矿井直流电法在井下应用时易受场地金属源干扰,特别是受掘进机、液压支架、锚锁(网)支护、轨道、输送管道等大型金属件影响。现阶段长供电、高稳定性的小型化、便携式电法勘探仪器并不多见,相关设备研发不能适配现阶段的生产需求,人工参与度依然较高。同时,大部分仪器设备采集通道有限,仪器本身的随机噪声压制等会对数据采集与可靠性造成干扰,这些问题都是约束矿井直流电法快速发展的因素。
4. 展望
1) 构建多源地电场数据响应特征库。系统研究深部煤岩体激励电位、自然电位、激励电流、电阻率、极化率等多参数特性规律,构建老空水、陷落柱、断层、破碎带等含/导水经典构造的地电场响应特征库,对于精细化分析矿井直流电法探查结果极为关键。通过理论计算与数值模拟,加强1∶1物理模型推演及工程应用,并结合物探、钻探、原位取芯测试,获取含水与不含水时经典构造的地电场差异化信息。这就要求既考虑不同区域不同地质条件下的电性响应特征,也要考虑地质构造的不同体积、不同类型、不同位置等带来的地电场差异,进而分析待测区域地质构造电性响应机制,准确定位异常区,为矿井防灾减灾工作提供参考。
2) 多源数据融合解释。采用单一测试方法反演多解性问题普遍存在,同时空间体积效应可能会存在假异常,需要通过多参数、多物探方法的联合与融合,建立一套合理、系统的解释方法。通过捕捉多源数据的有效信息,搭建物探、钻探及地质结构信息之间的桥梁,实现多源同构与异构信息的高效融合。同时,开展基础岩土试验与原位测试,分析其物性关系,提升多源数据的分辨能力。与此同时,基于交叉梯度约束与岩石物性约束对数据进行归一化处理,实现多空间多维度的多源数据融合。多源数据融合处理后进行联合反演,可有效降低或避免电法反演多解性问题,提高数据解释与成像精度。
3) 建立矿井直流电法智能化监测体系。基于矿井安全生产的需求,提高采集效率,降低劳动强度,研制集成震−电−磁等于一体的矿井物探仪器装备。在有限的矿井空间中最大化减小环境因素带来的限制,从抗干扰能力、稳定性、探测精度、多功能、长航时、抗噪、防尘一体化等方面提高电法仪器装备性能,同时仪器装备的更新换代及装备小型化、集成化、一键化、智能化是必然趋势。考虑通过非极化电极传感单元搭载钻机、盾构机、割煤机等设备进行随钻随探、随采随探、随掘随探。综合5G和大数据融合技术,尽快在统一标准下建立用于电阻率方法数据采集、处理和反演的三维可视化软件平台,建立矿井直流电法智能化监测体系,满足智能矿山建设的需求。矿井直流电法智能化监测体系如图6所示。
![]() 图 6 矿井直流电法智能化监测体系Figure 6. Intelligent monitoring system for mine DC electrical method
图 6 矿井直流电法智能化监测体系Figure 6. Intelligent monitoring system for mine DC electrical method5. 结语
分类概述了矿井直流电法测试技术的基本原理、发展历程及技术分类,总结了矿井直流电法测试技术在煤矿安全生产中的应用及相关仪器的研究进展。随着煤炭工业智能化建设要求的进一步提高和数字信息化与人工智能化的深度融合,矿井直流电法在解决复杂地质问题方面取得了较突出的进展,但是距离高效安全保障体系的形成及定量化、精细化探测尚有一定差距,需要在基础理论、技术装备和反演方法上有所突破。通过优化观测模式,开展多场联合反演,开发一体化综合探测装备,建立实时预报与智能监测预警系统,研究精细化数据解释方法,加强产教学研合作,为提高透明地质水平不断进行技术创新,以期满足智慧矿山对在线、实时、动态全周期监测的要求。新煤炭形势下,基于矿井物探技术联合与融合完善深地空间多场耦合分析,为矿井智能化建设添砖加瓦。
-
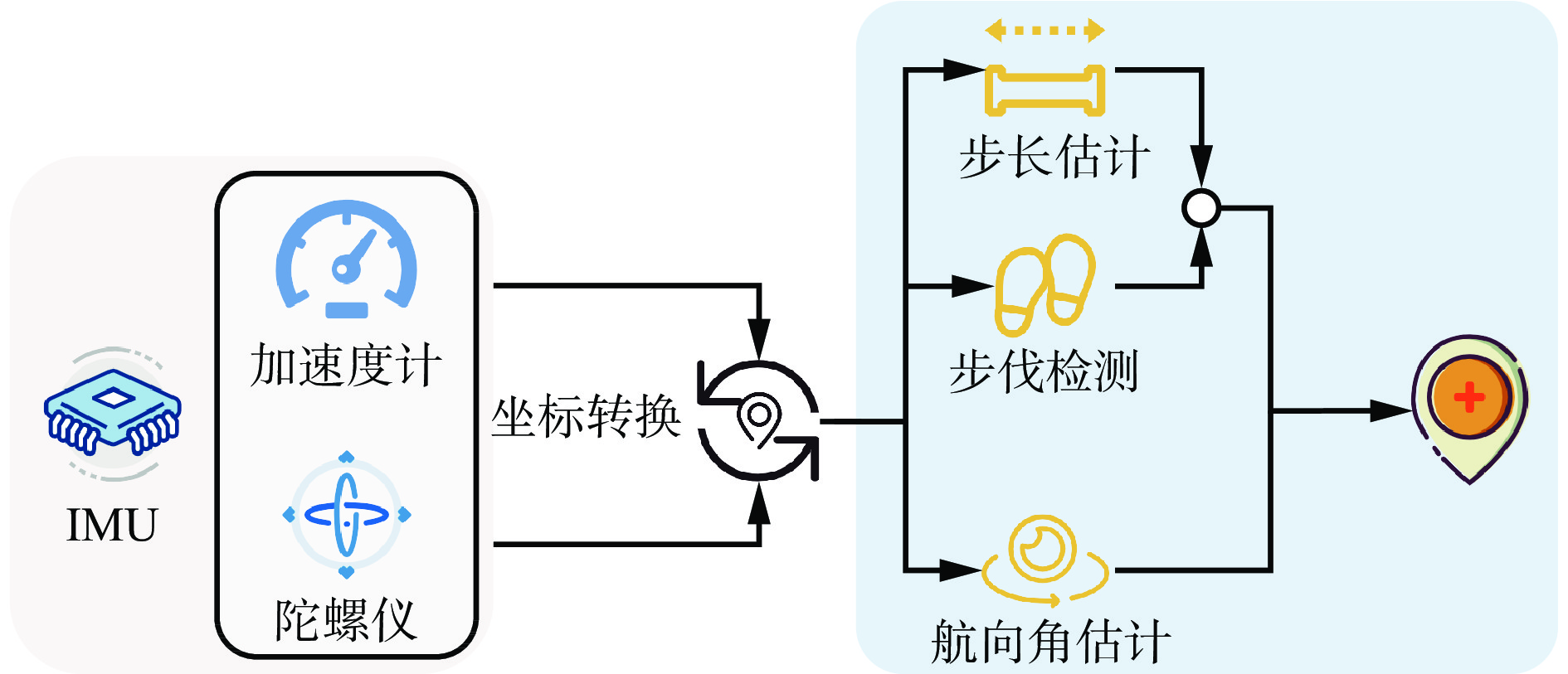
![]()
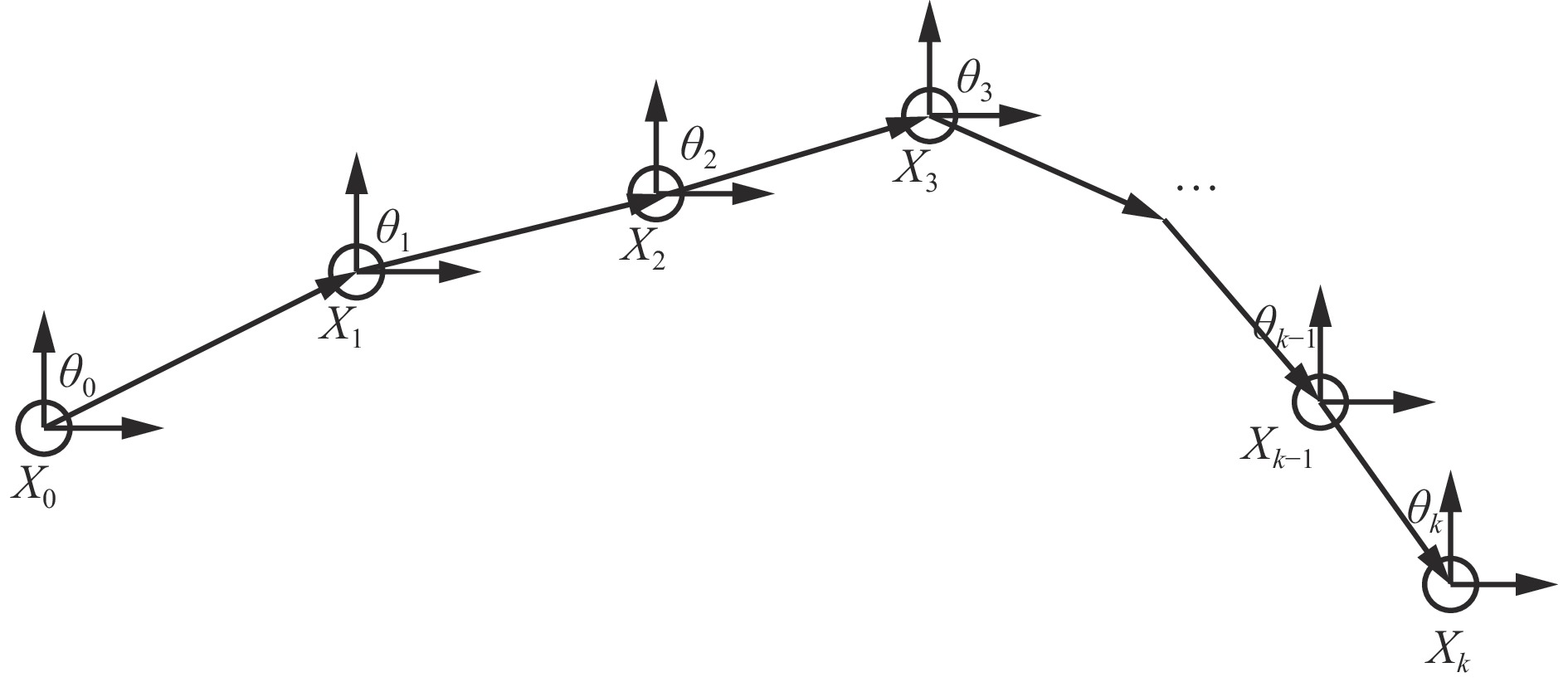
图 1 基于IMU的PDR算法
Figure 1. Pedestrian dead reckoning algorithm based on inertial measurement unit
![]()
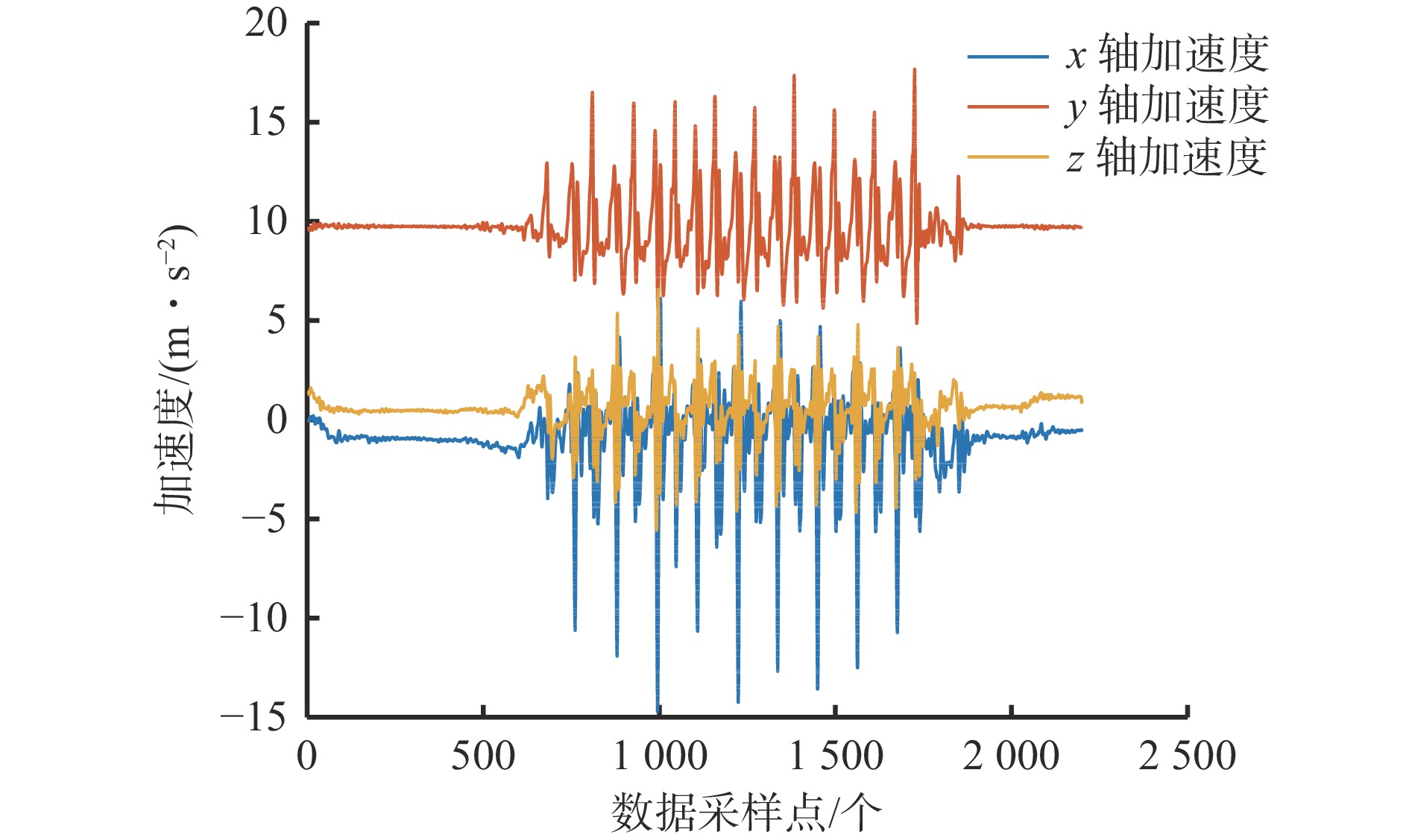
图 3 井下人员正常行走时三轴加速度计数据
Figure 3. Three-axis accelerometer data during normal underground personnel walking
![]()
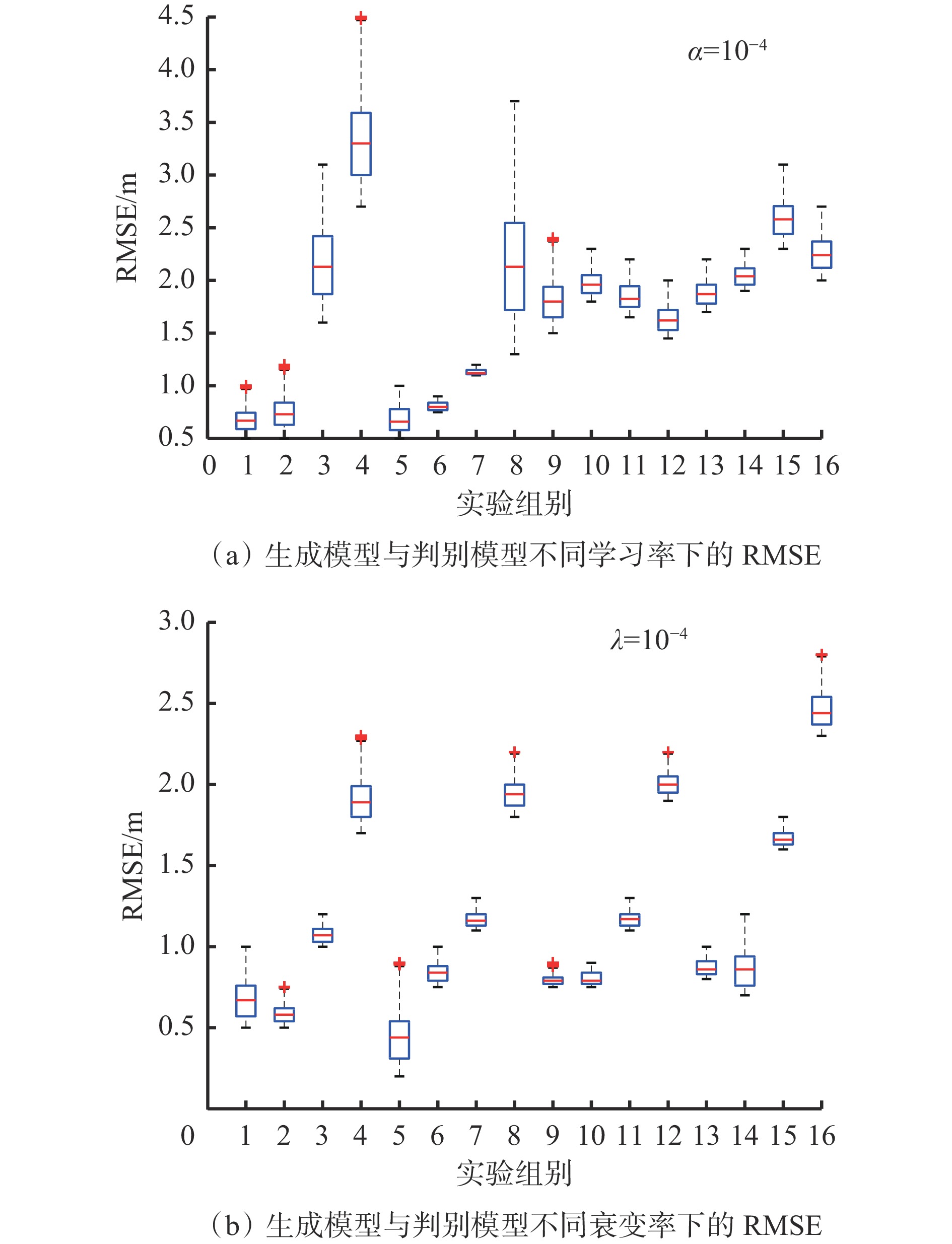
图 10 不同学习率/衰变率下算法的RMSE
Figure 10. Root mean square error of the algorithm under different learning rate/decay rate
![]()
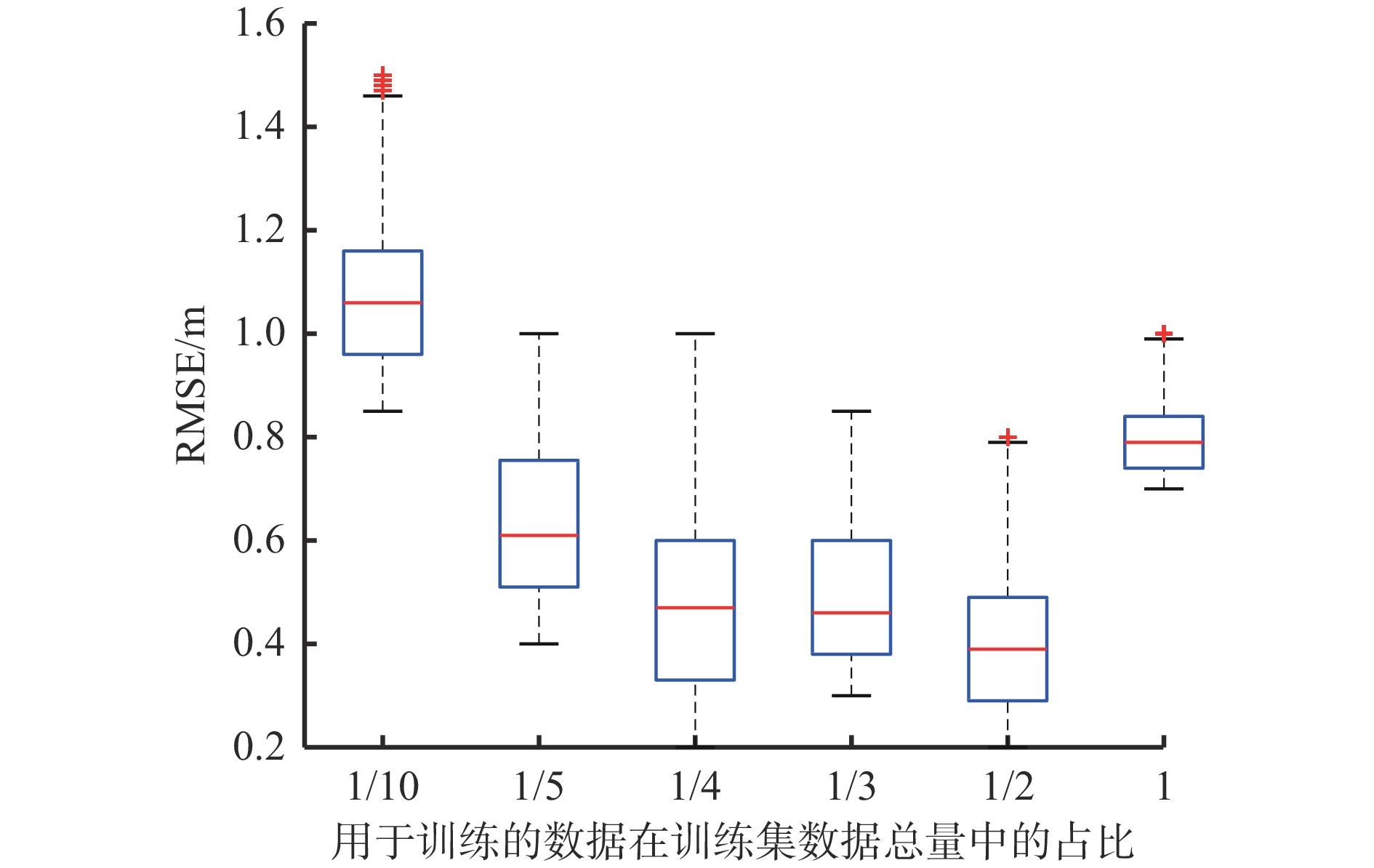
图 11 不同训练集比例下算法的RMSE
Figure 11. Root mean square error of the algorithm under different ratio of training data
![]()
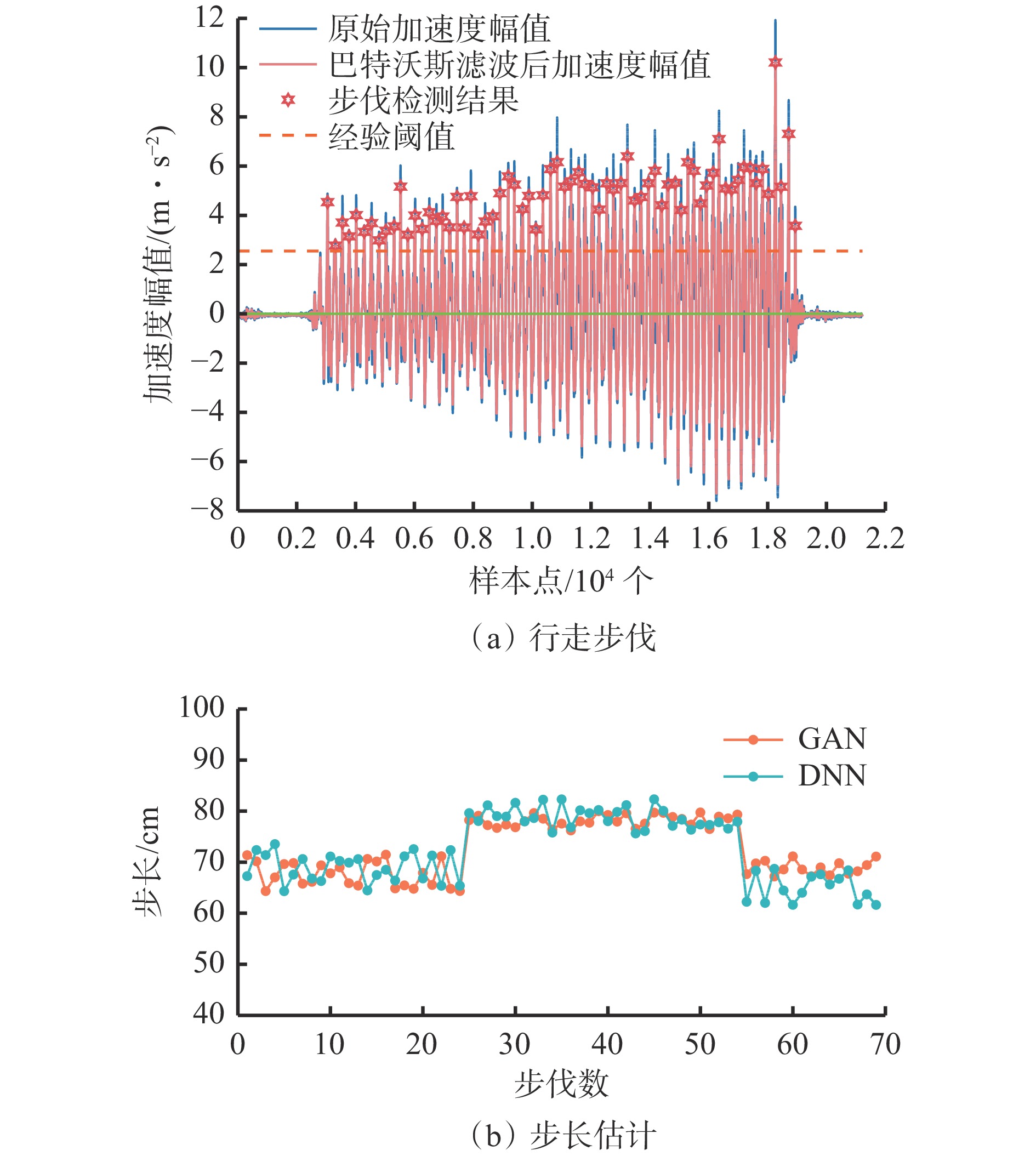
图 12 一次实验中的行走步伐与步长估计
Figure 12. Walking pace and step size estimation in an experiment
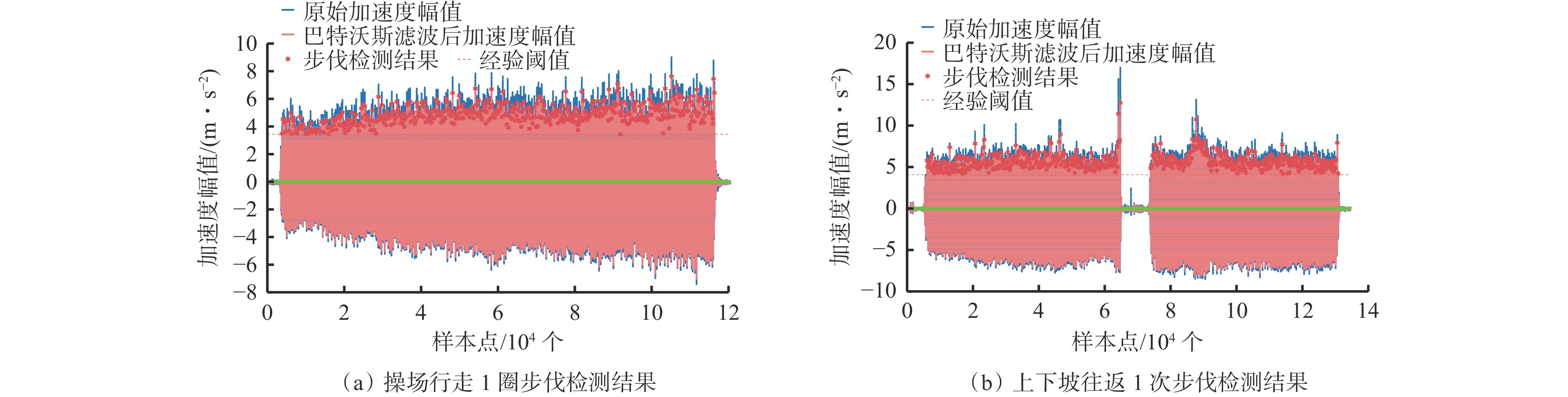
![]()
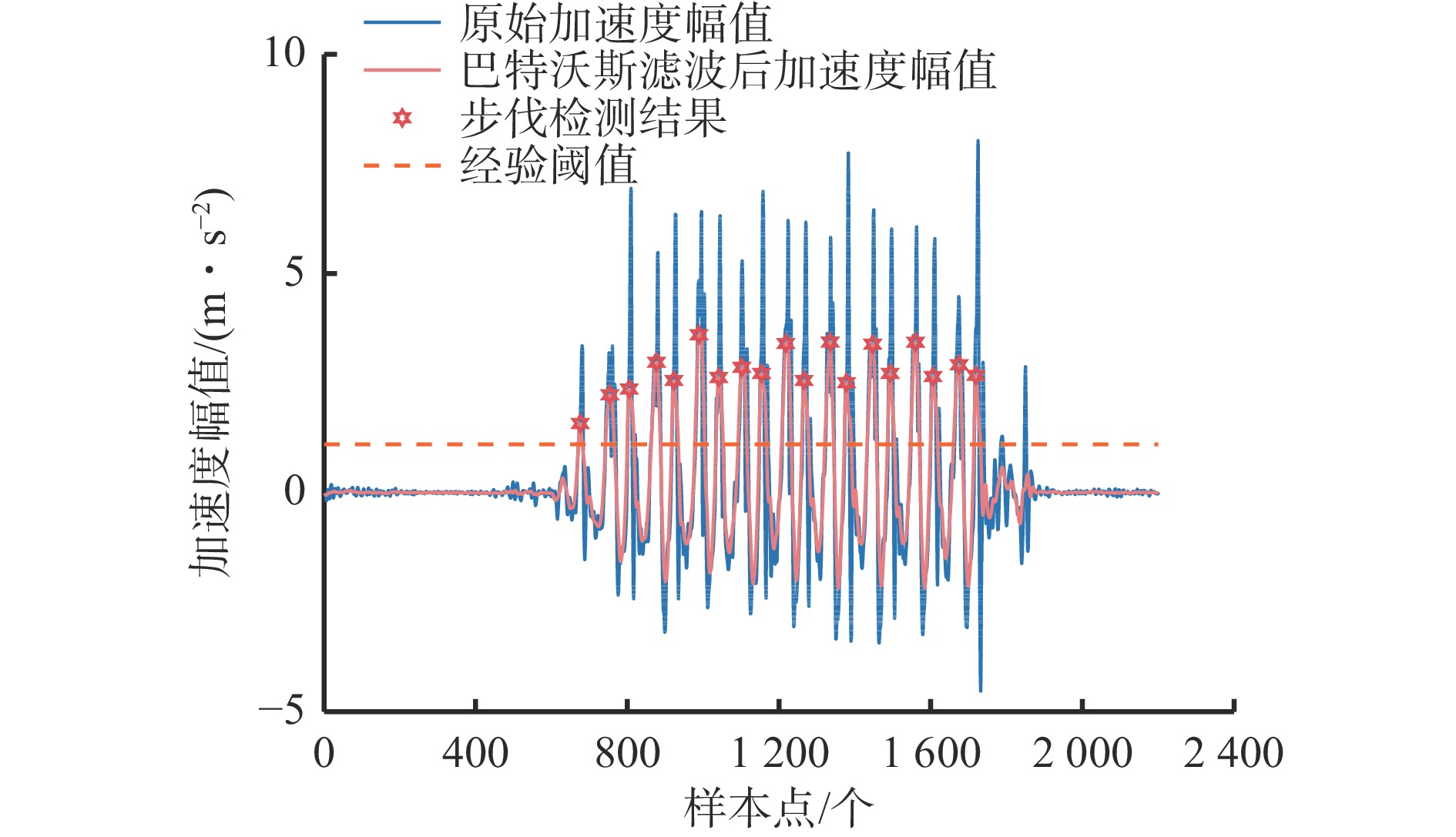
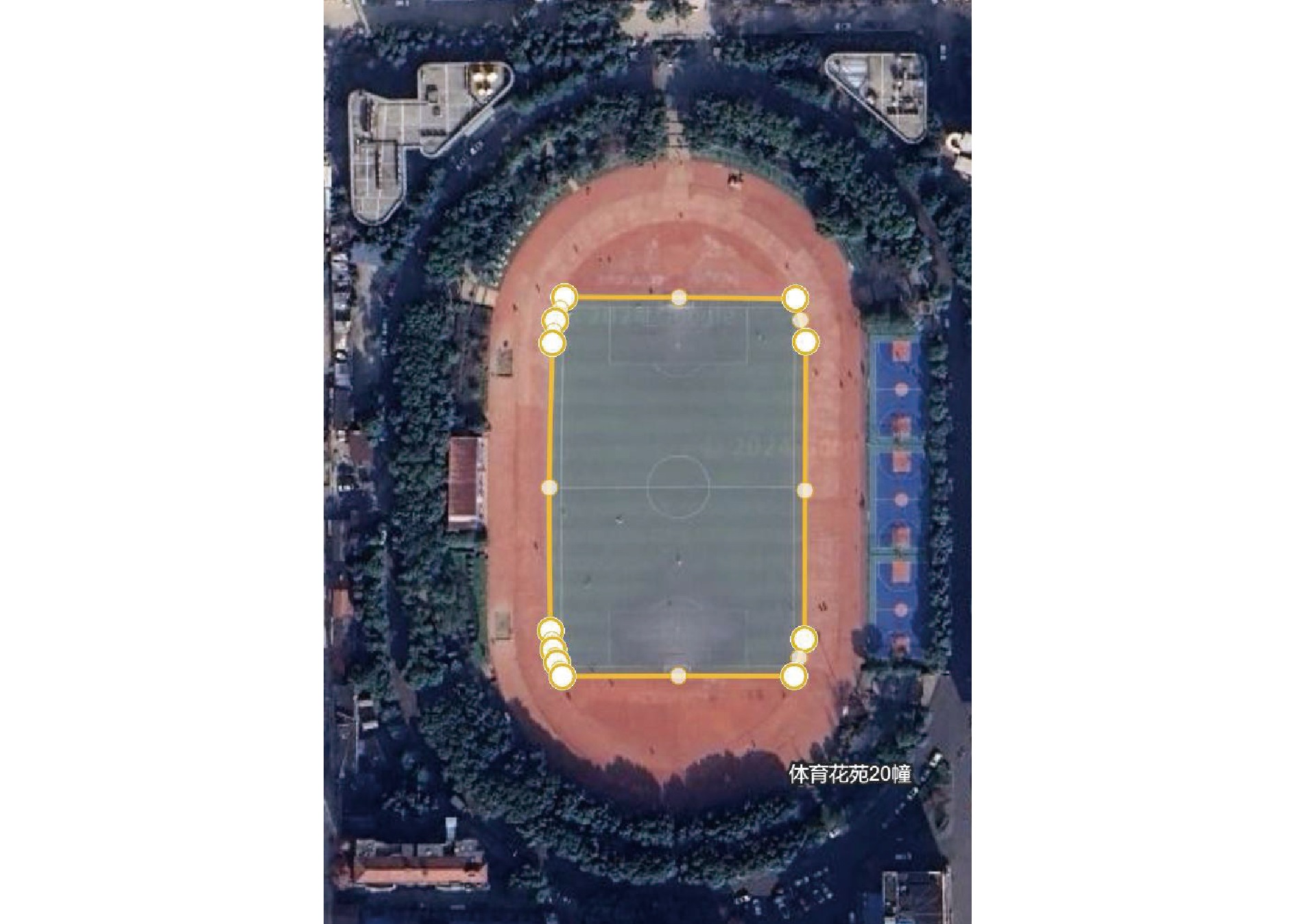
图 15 操场和上下坡测试步伐检测结果
Figure 15. Step detection results at playground and uphill and downhill
表 1 实验数据集
Table 1 Experimental dataset
数据集 行走速度 行走距离/m 采集次数 实际行走步数 训练集 慢速 20 50 1 639 中速 20 50 1 428 快速 20 50 1 104 测试集 混合 50 20 1 413  下载: 导出CSV
下载: 导出CSV
表 2 生成模型与判别模型超参数数值选项
Table 2 Hyperparameter numerical options for generative model and discriminant model
超参数 数值选项 优化器 SGD, RMSprop, Adam 学习率$ \alpha $ $ {10}^{-4} $, $ {2\times 10}^{-4} $, $ {10}^{-3},{2\times 10}^{-3} $ 动量$ {\beta }_{1} $ 0.5, 0.9 衰变率$ \lambda $ $ {10}^{-4},{10}^{-3},{10}^{-2},0 $ 样本数量占比 $ \dfrac{1}{10},\dfrac{1}{5},\dfrac{1}{4},\dfrac{1}{3},\dfrac{1}{2},1 $
下载: 导出CSV
表 3 生成模型与判别模型超参数默认值
Table 3 Default hyperparameters for generative model and discriminant model
超参数 生成模型 判别模型 优化器 Adam Adam 学习率$ \alpha $ $ {10}^{-4} $ $ {10}^{-4} $ 动量$ {\beta }_{1} $ 0.5 0.5 衰变率$ \lambda $ $ {10}^{-4} $ $ {10}^{-4} $ 样本数量占比 $ \dfrac{1}{2} $ $ \dfrac{1}{2} $
下载: 导出CSV
表 4 生成模型与判别模型超参数最优值
Table 4 Optimal hyperparameters for generative model and discriminant model
超参数 生成模型 判别模型 优化器 Adam Adam 学习率$ \alpha $ $ {10}^{-4} $ $ {10}^{-4} $ 动量$ {\beta }_{1} $ 0.5 0.5 衰变率$ \lambda $ $ {10}^{-4} $ $ 0 $ 样本数量占比 $ \dfrac{1}{2} $ $ \dfrac{1}{2} $
下载: 导出CSV
表 5 GAN模型与DNNs模型性能对比
Table 5 Performance comparison of generative adversarial network model and deep neural networks model
训练集数据量 模型 均值±STD/m RMSE/m 15 GAN 49.86±1.12 1.13 DNNs 50.06±1.49 1.49 30 GAN 49.83±0.99 1 DNNs 50.05±1.35 1.35 60 GAN 49.90±0.84 0.84 DNNs 50.12±1.28 1.29 120 GAN 49.89±0.76 0.77 DNNs 50.16±1.25 1.26 150 GAN 49.86±0.74 0.74 DNNs 50.15±1.23 1.24
下载: 导出CSV
表 6 户外最终测试结果
Table 6 Final outdoor test results
场景 实验次数 GAN DNNs 人员1距离/m 人员1误差/% 人员2距离/m 人员2误差/% 人员1距离/m 人员1误差/% 人员2距离/m 人员2误差/% 操场 1 362.64 1.13 363.34 1.33 366.36 2.17 367.30 2.43 2 364.76 1.72 364.51 1.65 369.95 3.17 367.32 2.44 3 362.56 1.11 364.85 1.75 371.64 3.64 369.59 3.07 4 362.59 1.12 364.26 1.58 370.89 3.43 368.96 2.90 5 364.46 1.64 364.82 1.74 365.29 1.87 370.34 3.28 上下坡 1 440.56 3.74 440.74 3.78 443.30 4.38 447.32 5.33 2 439.19 3.41 442.13 4.10 449.99 5.95 442.66 4.23 3 438.18 3.17 439.39 3.46 442.76 4.25 445.99 5.01 4 444.00 4.54 442.89 4.28 444.81 4.74 442.80 4.26 5 439.19 3.41 441.56 3.97 444.21 4.59 442.88 4.28
下载: 导出CSV
-
[1] 包建军,霍振龙,徐炜,等. 一种高精度井下人员无线定位方法[J]. 工矿自动化,2009,35(10):18-21. BAO Jianjun,HUO Zhenlong,XU Wei,et al. A wireless location method with high precision for underground personnel tracking[J]. Industry and Mine Automation,2009,35(10):18-21.
[2] LEVI R W,JUDD T. Dead reckoning navigational system using accelerometer to measure foot impacts:US5583776[P]. 1996-12-10.
[3] GUO Shuli,ZHANG Yitong,GUI Xinzhe,et al. An improved PDR/UWB integrated system for indoor navigation applications[J]. IEEE Sensors Journal,2020,20(14):8046-8061. DOI: 10.1109/JSEN.2020.2981635
[4] WANG Hucheng,ZHANG Lei,WANG Zhi,et al. Pals:high-accuracy pedestrian localization with fusion of smartphone acoustics and PDR[EB/OL]. [2024-01-12]. https://ceur-ws.org/Vol-2498/short38.pdf.
[5] DÍEZ L E,BAHILLO A,OTEGUI J,et al. Step length estimation methods based on inertial sensors:a review[J]. IEEE Sensors Journal,2018,18(17):6908-6926. DOI: 10.1109/JSEN.2018.2857502
[6] VEZOČNIK M,JURIC M B. Average step length estimation models' evaluation using inertial sensors:a review[J]. IEEE Sensors Journal,2019,19(2):396-403. DOI: 10.1109/JSEN.2018.2878646
[7] KONE Y,ZHU Ni,RENAUDIN V. Zero velocity detection without motion pre-classification:uniform AI model for all pedestrian motions (UMAM)[J]. IEEE Sensors Journal,2022,22(6):5113-5121. DOI: 10.1109/JSEN.2021.3099860
[8] MIYAZAKI S. Long-term unrestrained measurement of stride length and walking velocity utilizing a piezoelectric gyroscope[J]. IEEE Transactions on Bio-Medical Engineering,1997,44(8):753-759. DOI: 10.1109/10.605434
[9] TJHAI C,O'KEEFE K. Step-size estimation using fusion of multiple wearable inertial sensors[C]. International Conference on Indoor Positioning and Indoor Navigation,Sapporo,2017:1-8.
[10] XIA Hao,ZUO Jinbo,LIU Shuo,et al. Indoor localization on smartphones using built-in sensors and map constraints[J]. IEEE Transactions on Instrumentation and Measurement,2019,68(4):1189-1198. DOI: 10.1109/TIM.2018.2863478
[11] WANG Hucheng,XUE Can,WANG Zhi,et al. Smartphone-based pedestrian NLOS positioning based on acoustics and IMU parameter estimation[J]. IEEE Sensors Journal,2022,22(23):23095-23108. DOI: 10.1109/JSEN.2022.3185248
[12] HANNINK J,KAUTZ T,PASLUOSTA C F,et al. Mobile stride length estimation with deep convolutional neural networks[J]. IEEE Journal of Biomedical and Health Informatics,2018,22(2):354-362. DOI: 10.1109/JBHI.2017.2679486
[13] SUI J D,CHANG T S. IMU based deep stride length estimation with self-supervised learning[J]. IEEE Sensors Journal,2021,21(6):7380-7387. DOI: 10.1109/JSEN.2021.3049523
[14] JIN H,KANG I,CHOI G,et al. Wearable sensor-based step length estimation during overground locomotion using a deep convolutional neural network[C]. Annual International Conference of the IEEE Engineering in Medicine and Biology Society,Mexico,2021:4897-4900.
[15] DÍAZ S,DISDIER S,LABRADOR M A. Step length and step width estimation using wearable sensors[C]. The 9th IEEE Annual Ubiquitous Computing,Electronics & Mobile Communication Conference,New York,2018:997-1001.
[16] HAN K,YU S M,KO S W,et al. Waveform-guide transformation of IMU measurements for smartphone-based localization[J]. IEEE Sensors Journal,2023,23(17):20379-20389. DOI: 10.1109/JSEN.2023.3298713
[17] 孙延鑫,毛善君,苏颖,等. 改进的井下人员定位PDR算法研究[J]. 工矿自动化,2021,47(1):43-48. SUN Yanxin,MAO Shanjun,SU Ying,et al. Research on improved PDR algorithm for underground personnel positioning[J]. Industry and Mine Automation,2021,47(1):43-48.
[18] WANG Qu,LUO Haiyong,YE Langlang,et al. Personalized stride-length estimation based on active online learning[J]. IEEE Internet of Things Journal,2020,7(6):4885-4897. DOI: 10.1109/JIOT.2020.2971318
[19] 郭倩倩,崔丽珍,杨勇,等. 基于LSTM个性化步长估计的井下人员精准定位PDR算法[J]. 工矿自动化,2022,48(1):33-39. GUO Qianqian,CUI Lizhen,YANG Yong,et al. PDR algorithm for precise positioning of underground personnel based on LSTM personalized step size estimation[J]. Industry and Mine Automation,2022,48(1):33-39.
[20] VOIGHT J. Quaternion algebras[M]. Berlin:Springer,2021.
[21] DIEBEL J. Representing attitude:euler angles,unit quaternions,and rotation vectors[J]. Matrix,2006,58(15):1-35.







计量
- 文章访问数: 124
- HTML全文浏览量: 28
- PDF下载量: 16
