
A generation method for the cutting height template of the shearer drum based on working condition triggering
-
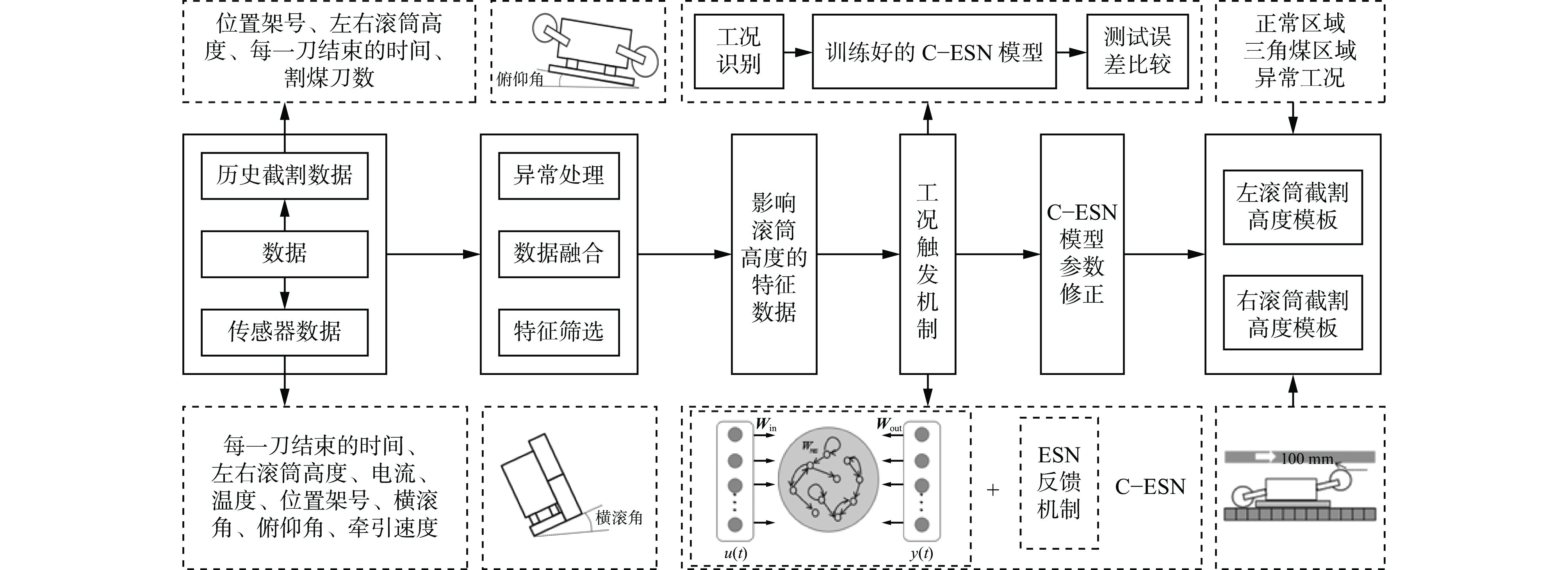
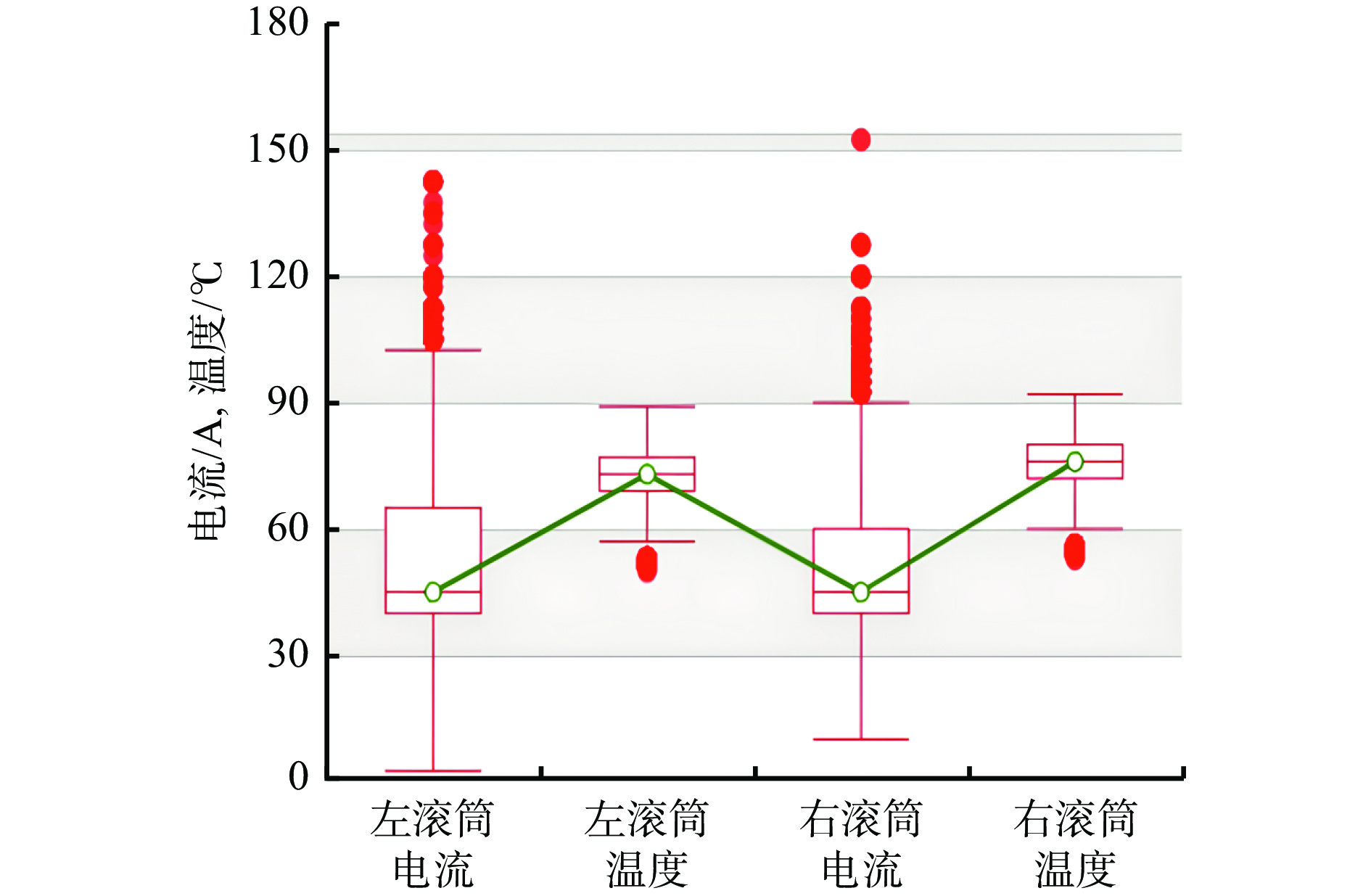
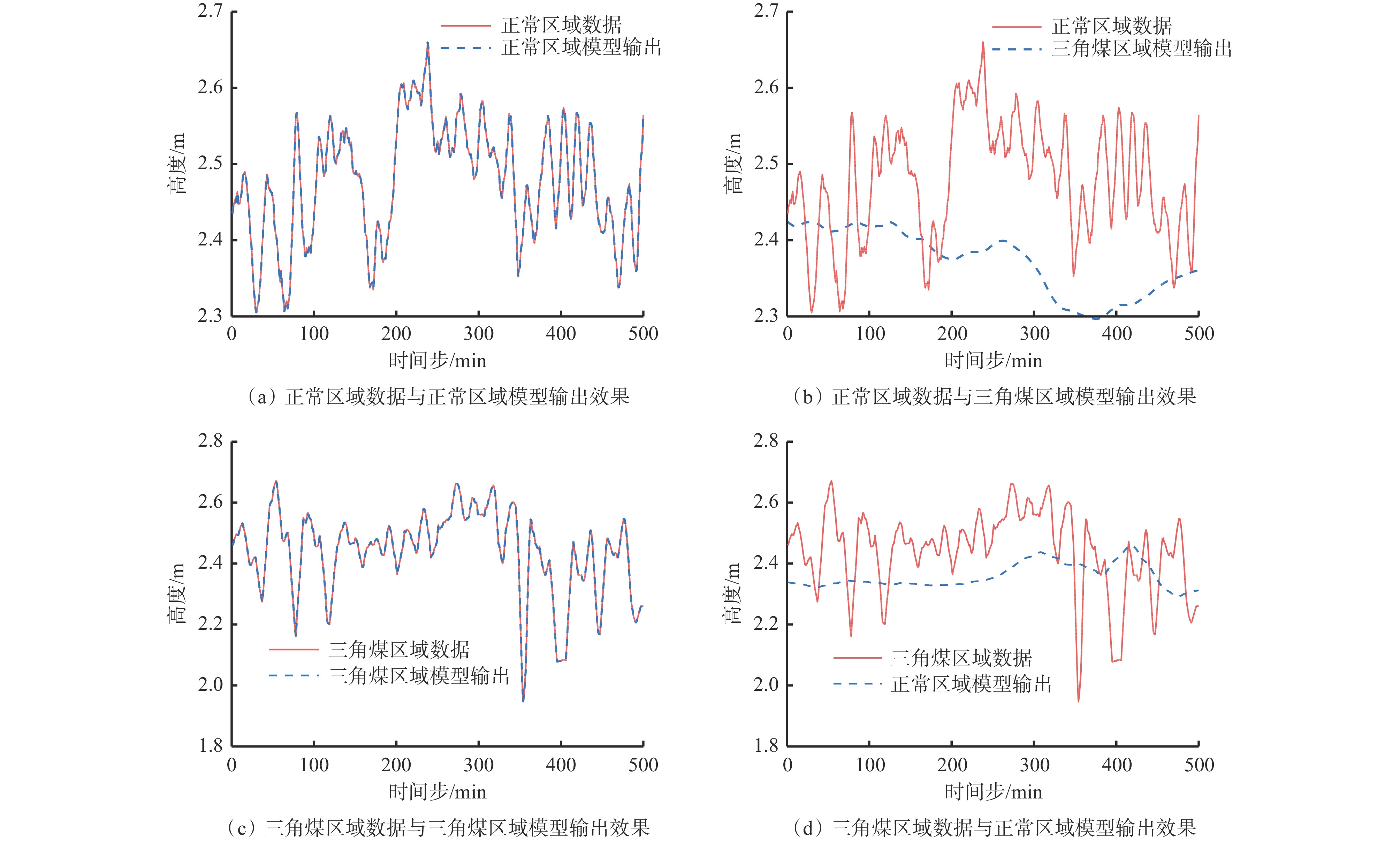
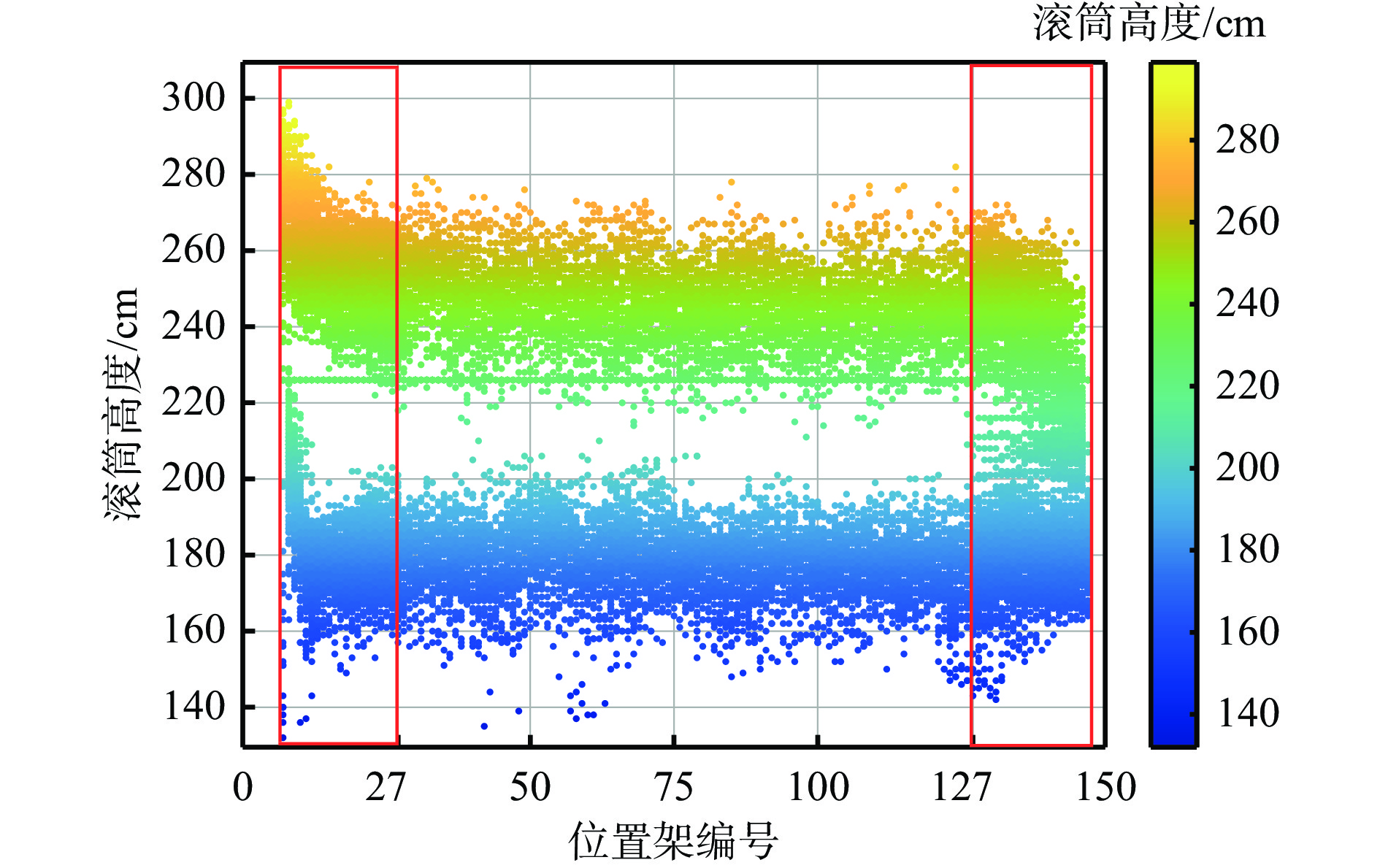
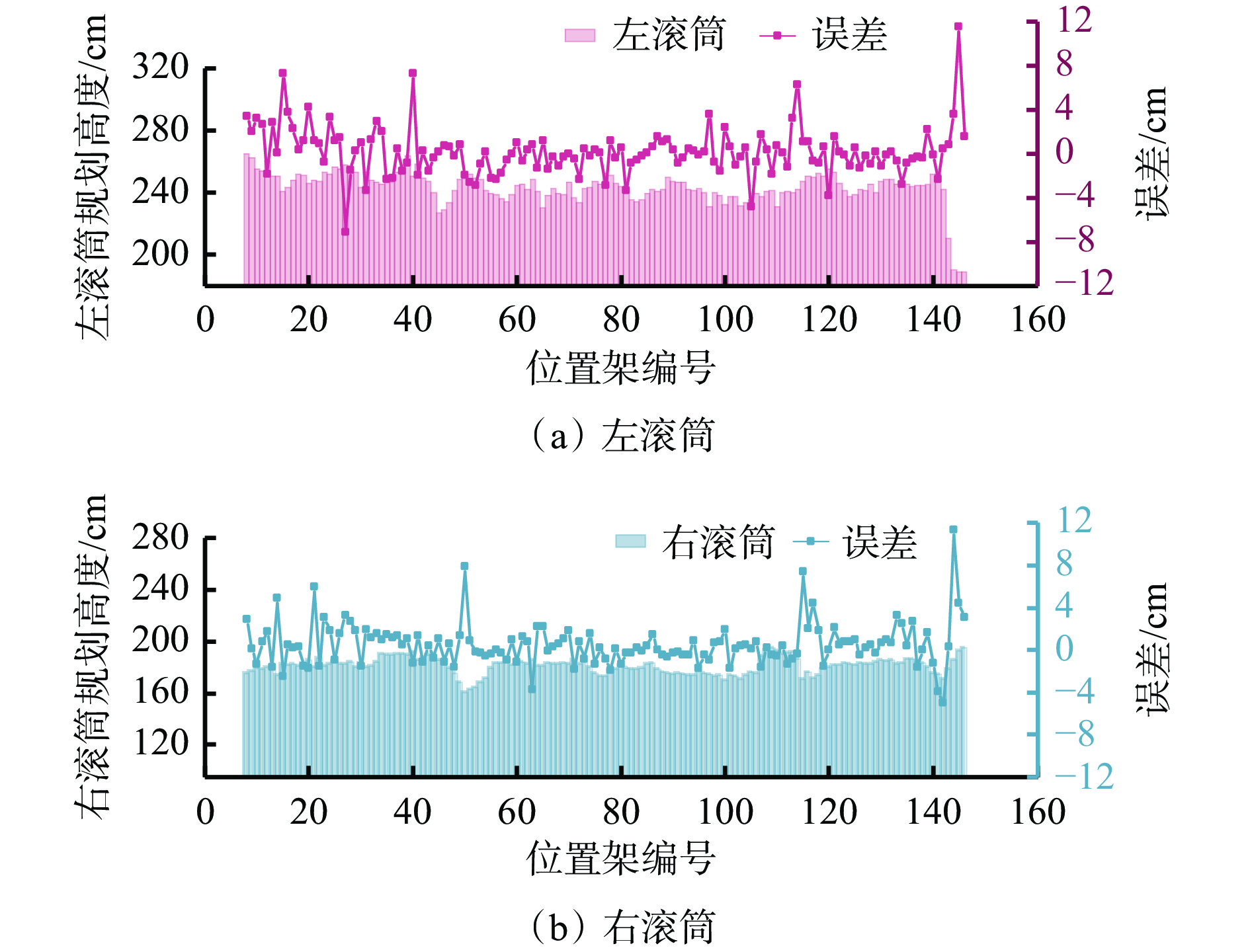
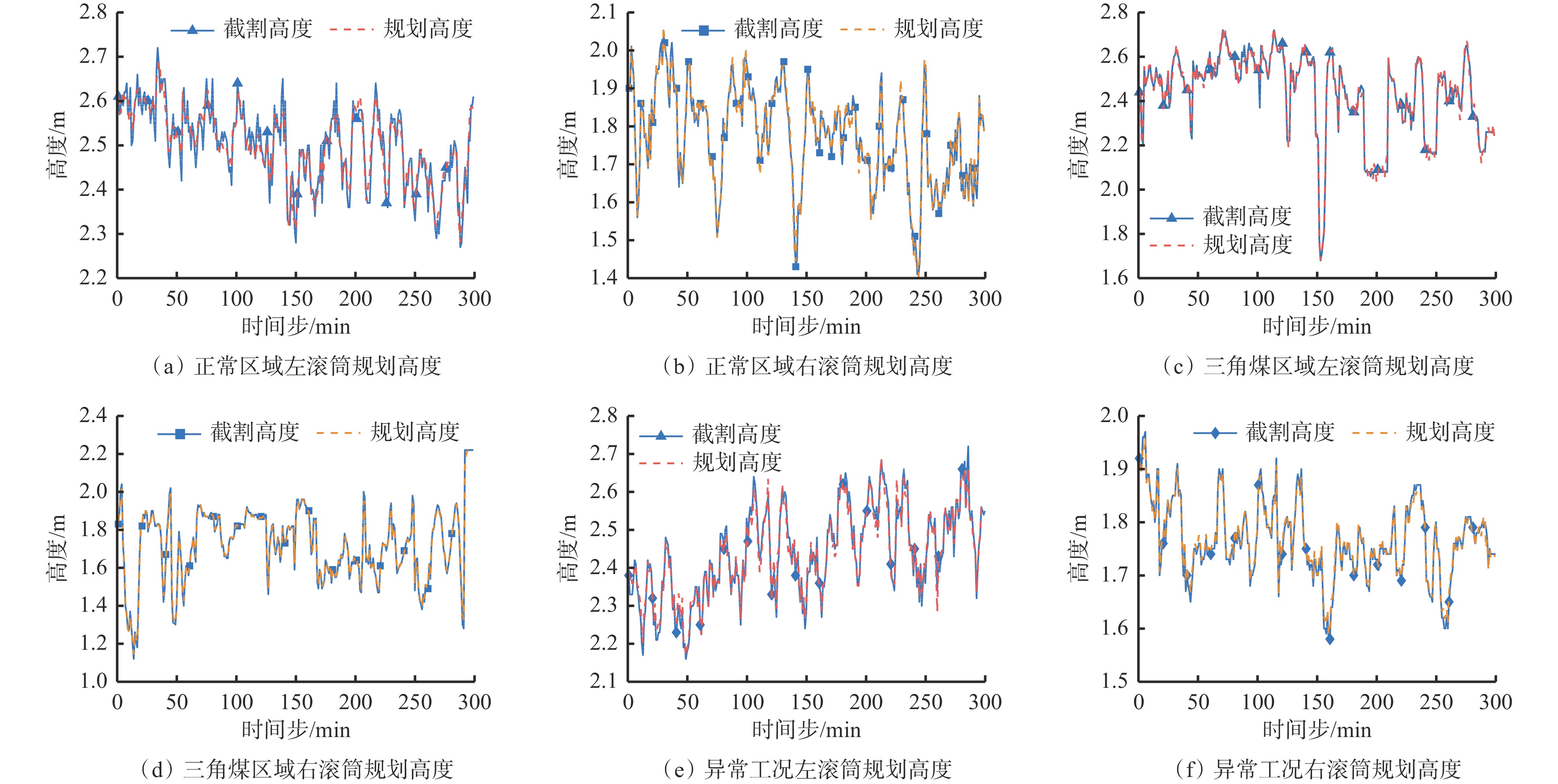
摘要: 针对采煤机在工作过程中易受不同工况条件的影响导致滚筒调高精度低的问题,提出了一种基于工况触发的采煤机滚筒截割高度模板生成方法。对采煤机历史传感器数据进行预处理和特征提取,选择影响滚筒高度调节的截割电动机电流、截割电动机温度、俯仰角、横滚角、牵引速度5维特征数据,构建用于生成滚筒截割高度模板的补偿回声状态网络(C−ESN)模型;建立工况触发机制,将采煤机传感器实时数据输入C−ESN模型,以测试误差为判断准则,识别当前采煤机的工况为正常区域、三角煤区域或异常工况;最后,C−ESN模型生成相应的滚筒截割高度模板。当三角煤区域和正常区域测试误差都大于阈值时,采用迁移学习方法对测试误差小的截割高度模板参数进行修正,以保证异常工况下截割高度模板的精度。基于现场采煤机实际数据的实验结果表明:左右滚筒截割高度模板与实际截割高度相比,在正常区域的最大误差分别为11.47,9.96 cm,在三角煤区域最大误差分别为12.91,7.94 cm,能够满足工程实际要求;与传统回声状态网络和径向基函数网络模型相比,C−ESN模型的精度在正常区域分别提升了54%和57%,在三角煤区域分别提升了10%和69%。Abstract: In order to solve the problem of low precision in drum height adjustment caused by different working conditions during the working process of the shearer, a generation method for cutting height template of the shearer drums based on working condition triggering is proposed. The method preprocesses and extracts features from historical sensor data of the shearer, selects 5-dimensional feature data that affect the adjustment of drum height, including cutting motor current, cutting motor temperature, pitch angle, roll angle, and traction speed. The method constructs a compensated echo state network (C-ESN) model for generating drum cutting height templates. The method establishes a working condition triggering mechanism, inputs real-time data from the shearer sensors into the C-ESN model. The method uses testing error as the judgment criterion to recognize the current working condition of the shearer as normal area, triangular coal area, or abnormal working condition. Finally, the C-ESN model generates the corresponding drum cutting height template. When the testing errors in both the triangular coal area and the normal area are greater than the threshold, transfer learning method is used to correct the parameters of the cutting height template with small testing errors to ensure the precision of the cutting height template under abnormal working conditions. The experimental results based on actual data of on-site coal mining machines show that compared with the actual cutting height, the maximum errors of the left and right drum cutting height templates in the normal area are 11.47 cm and 9.96 cm, respectively, and in the triangular coal area are 12.91 cm and 7.94 cm, respectively.The results can meet the practical requirements of engineering. Compared with traditional echo state network and radial basis function network models, the precision of the C-ESN model has been improved by 54% and 57% in the normal region, and by 10% and 69% in the triangular coal region, respectively.
-
0. 引言
综采工作面作为煤炭生产的第一现场,其复杂多变的环境给煤矿智能化发展带来诸多挑战[1]。液压支架姿态监测是综采工作面日常生产工作的重要组成部分。液压支架姿态对支架的承载力有很大影响,不合理的姿态会造成支架整体失衡,使支架关键零部件应力增加,严重时会导致其受到损伤[2-3]。
当前液压支架姿态监测研究集中在基于多传感器的支架空间位姿参数监测方面。张坤等[4]提出了一种基于倾角传感器和陀螺仪的液压支架姿态角度测量系统,并用卡尔曼滤波对2种传感器测量的角度进行数据融合,提高了顶梁姿态角度测量精度,然而其仅研究了顶梁的姿态状况,缺乏对支架其余关键姿态信息的监测。马盟[5]设计了双悬臂梁结构的光纤光栅二维倾角传感器,为液压支架的姿态角监测提供了新思路,然而光纤光栅传感器需要配置专用的解码系统,使用成本高,且光纤传感器的布置较复杂。张旭辉等[6]提出了一种基于视觉测量的液压支架位姿检测方法,实现了支架直线度监测,但视觉测量受粉尘影响严重,设备维护较困难。韩哲等[7]设计了一种基于LoRaWAN的液压支架状态监测系统,增强了监测系统通信稳定性,但LoRaWAN为专有通信协议,需配合远距离无线电 (Long Range Radio,LoRa)模块的专用网关才可实现,系统布置成本高。任怀伟等[8]提出了一种基于深度视觉原理的液压支架支撑高度与顶梁姿态角测量方法,但该方法的可靠性受粉尘影响大。欧阳敏等[9]设计了一种新型液压支架姿态监测系统,有效解决了多监测点数据采集延时、丢包、死机等问题,但仅实现了支架压力监测。现有液压支架姿态监测系统在测量可靠性、工况环境适应能力、测量参数全面性、系统布置简洁性与成本等方面尚不能完全满足井下实际作业需求,亟需一种集成度高、布置简洁、低功耗、成本合理、可实现液压支架姿态多参数测量的传感器系统。
数字信号处理器 (Digital Signal Processor,DSP)的计算性能、集成度、外设丰富程度、稳定性和功耗表现都优于常见的微控制器,适用于工业监测与控制中[10]。微机电技术 (Micro Electro Mechanical System,MEMS)实现了传感器的小型化和高度集成,适用于便携式设备和无线传感器网络等对电池寿命和能源效率要求较高的场景中[11-12]。LoRa 技术适用于长距离、超低功耗、少量数据传输场景[13],其通信功耗明显低于传统的无线通信技术,可有效延长传感器的工作寿命,进而降低设备维护成本。液压支架一个完整工作周期内的绝大部分时间处于静止支护状态,仅在采煤机经过前后有移架动作,且其姿态变化过程缓慢,数据传输容量小。因此,LoRa技术适用于液压支架姿态传感系统的信息传输。
为了解决现有液压支架姿态测量系统测量参数少、精度不高、传感器数据处理能力弱、有线信号传输方式布线复杂、工况环境适应性差等问题,研制了以DSP为核心、以MEMS惯导为测量元件、具备LoRa无线功能的姿态传感器,提出一种直接测量与间接测量相结合的液压支架关键姿态参数测量系统。将4个姿态传感器安装于顶梁、掩护梁、前连杆、底座,结合红外激光测距传感器,实现推移步距、支护高度、立柱长度和平衡千斤顶长度测量。
1. 支架姿态关键参数与测量方法
1.1 支架姿态关键参数
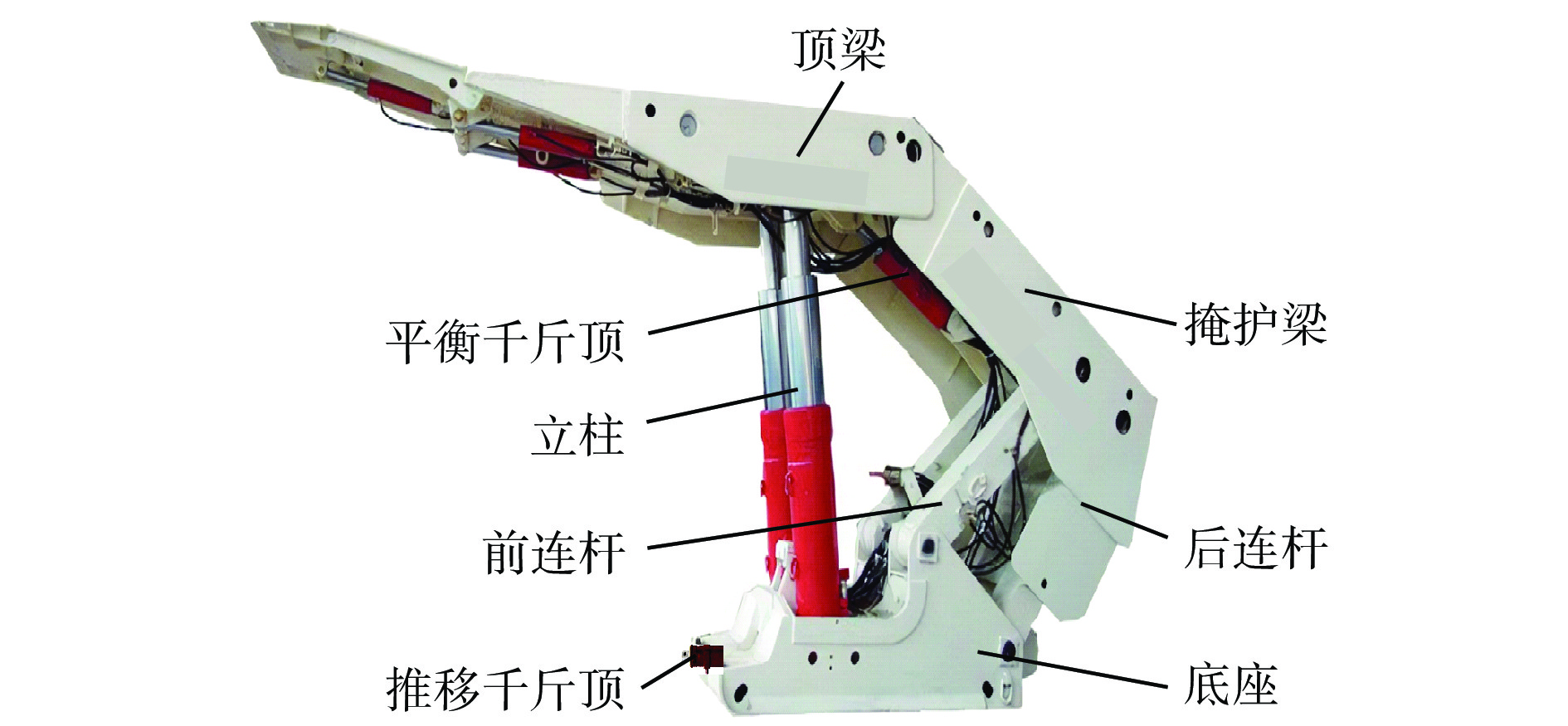
双立柱掩护式液压支架是一种较常见的液压支架,主要由底座、前连杆、后连杆、掩护梁、顶梁、立柱、推移千斤顶和平衡千斤顶组成。其中底座直接与底板接触传递支撑力。顶梁直接与顶板接触传递支撑力并起护顶作用。立柱用于调节液压支架高度并支撑顶梁。掩护梁用于连接顶梁和连杆,承受顶板垮落岩石压力,防止采空区掉落矸石进入液压支架。推移千斤顶用于推移刮板输送机和液压支架。平衡千斤顶用于调节顶梁倾角以适应不同顶板状态。双立柱掩护式液压支架如图1所示。
液压支架移架方向与综采工作面推进方向相同。当采煤机经过当前液压支架时,支架按照以下顺序动作:① 收缩立柱与平衡千斤顶,改变顶梁、掩护梁和前后连杆与水平面的倾斜角度,降低支架的支护高度。② 收缩推移千斤顶,将液压支架向工作面推进方向拉近1个步距。③ 伸长立柱,支架顶梁支撑起顶板,此时为了适应不同的煤层状态,平衡千斤顶会随之伸长或收缩以改变顶梁的倾角,保证顶梁与顶板的紧密贴合。④ 伸长推移千斤顶,将刮板输送机向前推移1个步距,至此完成移架。影响液压支架支护姿态的关键参数包括底座、前连杆、掩护梁和顶梁与水平面的夹角,推移步距,支架支护高度,立柱长度,平衡千斤顶长度。其中,推移步距是推移千斤顶作用的直接结果,支护高度是支架各部分姿态改变结果的综合体现。
1.2 液压支架姿态关键参数测量方法
液压支架姿态关键参数测量方法包括直接测量和间接测量2种,其中底座、前连杆、掩护梁和顶梁与水平面夹角及推移步距采用直接测量方式,支护高度、立柱与平衡千斤顶长度采用间接测量方式。
1.2.1 直接测量
采用MEMS惯性测量元件MPU6050测量底座、前连杆、掩护梁和顶梁与水平面的夹角,该元件内部集成了三轴MEMS陀螺仪、三轴MEMS加速度计[14]。将加速度计和陀螺仪的测量数据进行融合,并通过数字运动处理器(Digital Motion Processor,DMP)解算,得到四元数$ {q}_{0} $—$ {q}_{3} $。四元数是一种描述三维空间旋转信息的数学工具,用于描述旋转、姿态和方向等在三维空间中的运动和变换。使用四元数到旋转矢量的转换公式从四元数中提取旋转信息,将其表示为旋转矢量的角度,解算得到相对水平面的倾角:
$$\varOmega =\mathrm{arctan}\left[-\frac{2\left({q}_{1} {q}_{3}-{q}_{0} {q}_{2}\right)}{{{q}_{0}}^{2}-{{q}_{1}}^{2}-{{q}_{2}}^{2}+{{q}_{3}}^{2}}\right] $$ (1) 液压支架推移步距可采用干簧管式位移传感器[15]和磁致伸缩位移传感器[16]等接触式测量方式。此外也可采用基于直接飞行时间原理的红外激光测距传感器进行非接触测量[17-18]。将传感器安装在底座推移千斤顶处,保证红外光的发射通路与支架推移方向平行且无遮挡,计算从发射红外光至接收到反射光的时间与光速的乘积,得到液压支架的推移步距。
1.2.2 间接测量
支架支护高度、立柱长度和平衡千斤顶长度3个参数难以直接测量,故采用间接测量方式。建立支架二维模型,可以推导出支护高度、立柱长度、平衡千斤顶长度与底座相对于水平面的夹角$ \gamma $、前连杆相对于水平面的夹角$ \beta $、掩护梁相对于水平面的夹角$ \omega $、顶梁相对于水平面的夹角$ \alpha $之间的函数关系。
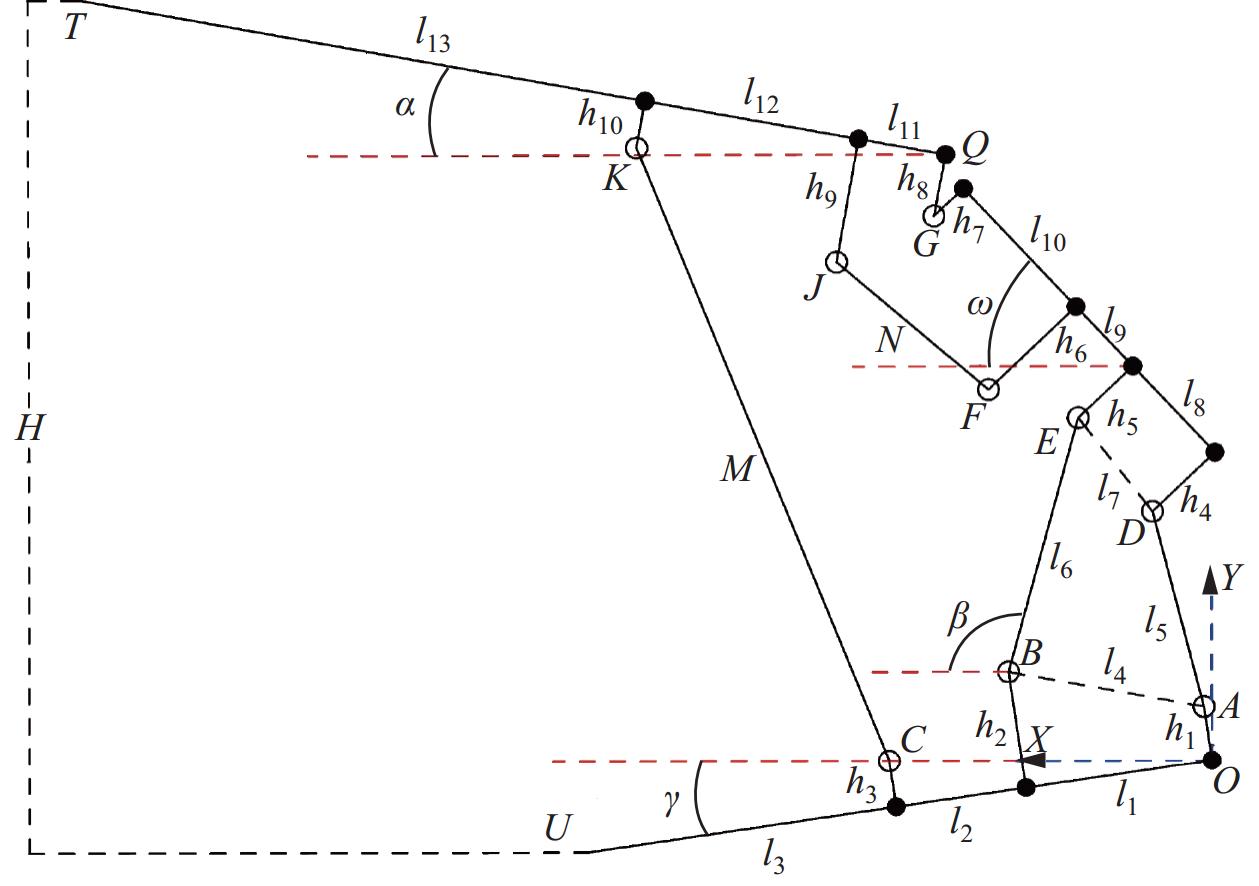
对双立柱掩护式液压支架进行抽象简化,得到两自由度多连杆耦合二维杆系模型,如图2所示。在模型中,以底座靠近采煤空顶区一侧为坐标原点O,垂直于水平面向顶板方向为Y轴正方向,平行于水平面向刮板输送机推移方向为X轴正方向,建立直角坐标系。其中$ {l}_{1} $−${l}_{13} $为支架各部位连杆结构的长度;$ {h}_{1} $−$ {h}_{10}$为支架连杆结构与各销轴连接点的垂线距离;$ H $为支护高度,即支架顶梁最前端到底座最前端的高度;$ M $为立柱当前长度;$ N $为平衡千斤顶当前长度。其余各铰接点以相应字母表示。
立柱与底座铰接点C的坐标为
$$\left\{\begin{array}{c}{X}_{C}={h}_{3}\sin \;\gamma +\left({l}_{1}+{l}_{2}\right)\cos \;\gamma \\ {Y}_{C}={h}_{3}\cos \;\gamma -\left({l}_{1}+{l}_{2}\right)\sin \;\gamma \end{array}\right.$$ (2) 设E点坐标为(XE,YE),过E点向掩护梁与平衡千斤顶铰接的连杆作垂线,该垂线与线段FE的夹角为$ {\theta }_{1} $,F点至E点的距离为$ {L}_{FE} $,则平衡千斤顶与掩护梁铰接点F的坐标为
$$ \left\{ \begin{array}{c}{X}_{F}={X}_{E}+{L}_{FE}\cos \;\left(\omega -{\theta }_{1}\right)\\ {Y}_{F}={Y}_{E}+{L}_{FE}\sin \;\left(\omega -{\theta }_{1}\right)\end{array}\right. $$ (3) 过G点向前连杆与掩护梁铰接的连杆作垂线,设该垂线与线段GE的夹角为$ {\theta }_{2} $,G点至E点的距离为$ {L}_{GE} $,则顶梁与掩护梁铰接点G的坐标为
$$ \left\{ \begin{array}{l}{X}_{G}={X}_{E}+{L}_{GE}\cos \;\left(\omega +{\theta }_{2}\right)\\ {Y}_{G}={Y}_{E}+{L}_{GE}\sin\; \left(\omega +{\theta }_{2}\right)\end{array}\right. $$ (4) 平衡千斤顶与顶梁铰接点J的坐标为
$$ \left\{ \begin{array}{l}{X}_{J}={X}_{G}+{l}_{11}\cos \;\alpha +\left({h}_{9}-{h}_{8}\right)\sin \;\alpha \\ {Y}_{J}={Y}_{G}-\left|\sqrt{{L}_{JG}^{2}-{\left({X}_{J}-{X}_{G}\right)}^{2}}\right|\end{array}\right. $$ (5) 式中LJG为J点至G点的距离。
顶梁与立柱铰接点K的坐标为
$$ \left\{ \begin{array}{l}{X}_{K}={X}_{J}+{l}_{12}\cos \;\alpha +\left({h}_{10}-{h}_{9}\right)\sin \;\alpha \\ {Y}_{K}={Y}_{J}+{L}_{KJ}\sin \;\left[\mathrm{arctan}\left(\dfrac{{h}_{9}-{h}_{10}}{{l}_{12}}\right)+\alpha \right]\end{array}\right. $$ (6) 式中LKJ为K点至J点的距离。
立柱长度与平衡千斤顶长度为
$$\left\{ \begin{array}{c}M=\left|\sqrt{{\left({X}_{K}-{X}_{C}\right)}^{2}+{\left({Y}_{K}-{Y}_{C}\right)}^{2}}\right|\\ N=\left|\sqrt{{\left({X}_{J}-{X}_{F}\right)}^{2}+{\left({Y}_{J}-{Y}_{F}\right)}^{2}}\right|\end{array}\right. $$ (7) 液压支架的支护高度为
$$ H=\left({l}_{11}+{l}_{12}+{l}_{13}\right)\sin \;\alpha +{h}_{8}\cos\; \alpha+{Y}_{G}+\left({l}_{1}+{l}_{2}+{l}_{3}\right)\sin \;\gamma $$ (8) 2. 测量系统设计
2.1 硬件设计
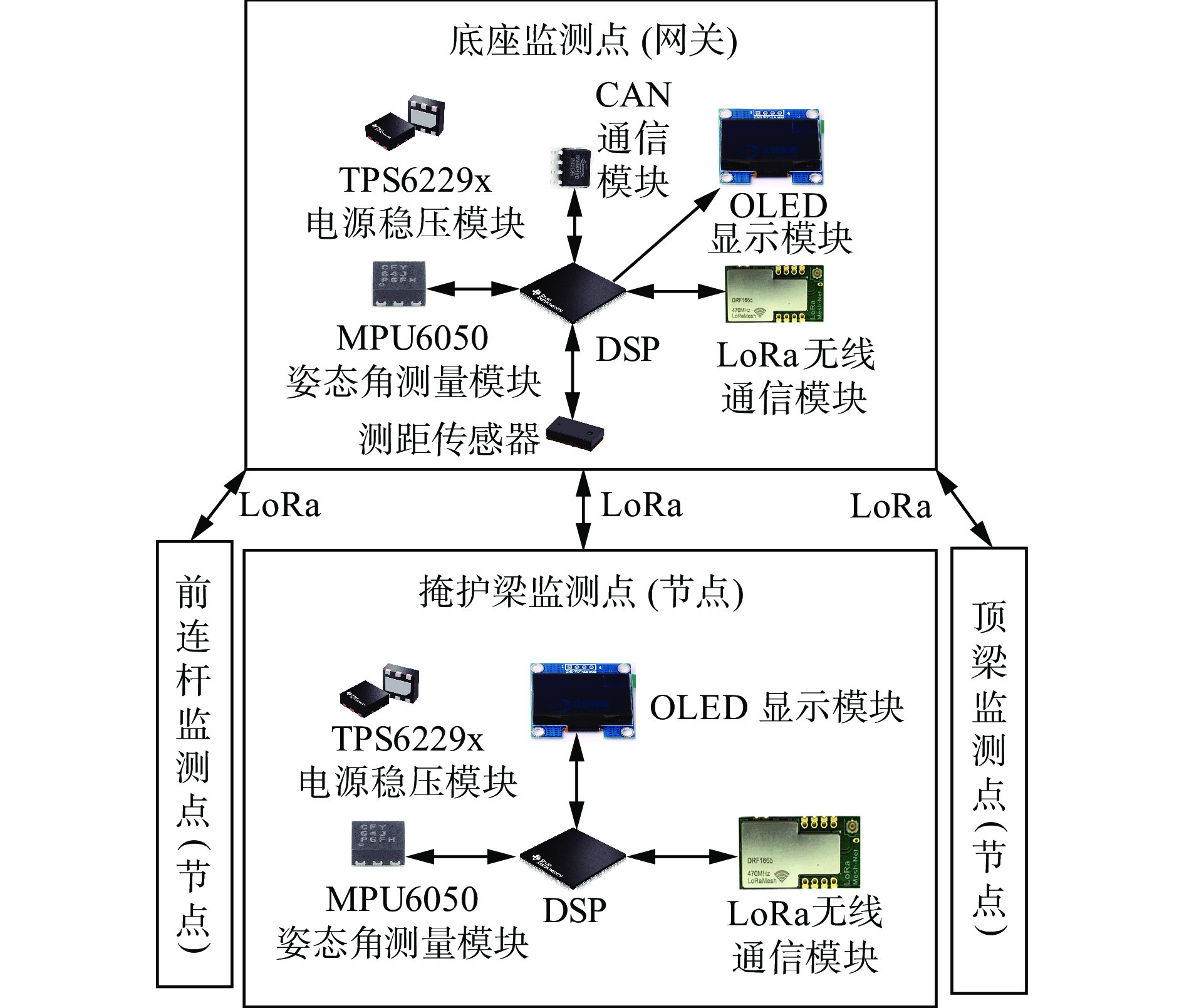
液压支架关键姿态参数测量系统硬件包括安装于底座、前连杆、掩护梁、顶梁处的4个具备无线通信功能的姿态传感器和1个安装于底座的红外激光测距传感器。该系统通过LoRa无线通信方式组网,底座处的姿态传感器作为网关(即网关传感器),其他3处的姿态传感器作为节点(即节点传感器)。网关传感器用于测量底座与水平面的夹角,控制红外激光测距传感器测量推移步距,接收来自各节点的角度信息,处理获取的数据,并解算支护高度、立柱长度和平衡千斤顶长度。节点传感器用于测量前连杆、掩护梁和顶梁与水平面的夹角,并将获得的角度信息上报至网关传感器。系统硬件组成如图3 所示。
![]() 图 3 液压支架关键姿态参数测量系统硬件组成Figure 3. Hardware composition of the key attitude parameter measurement system for hydraulic supports
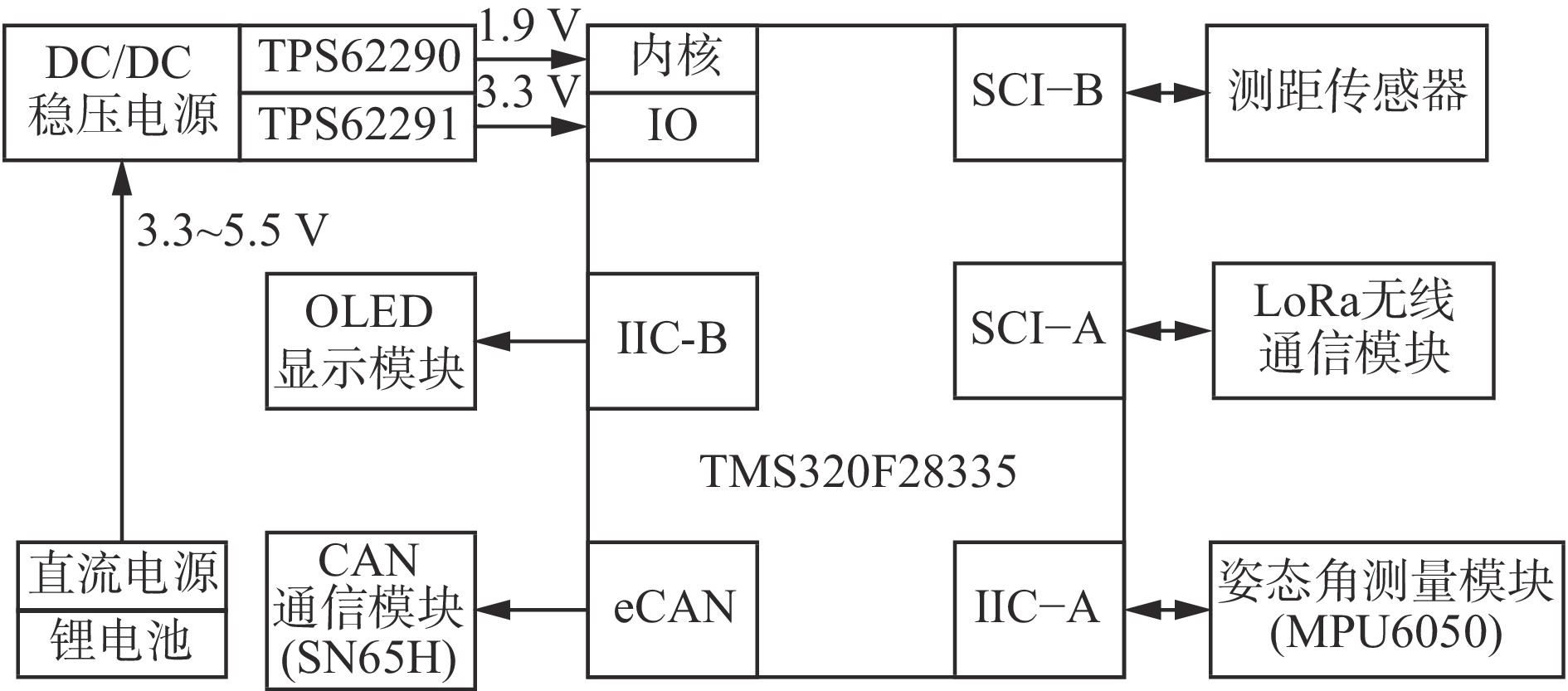
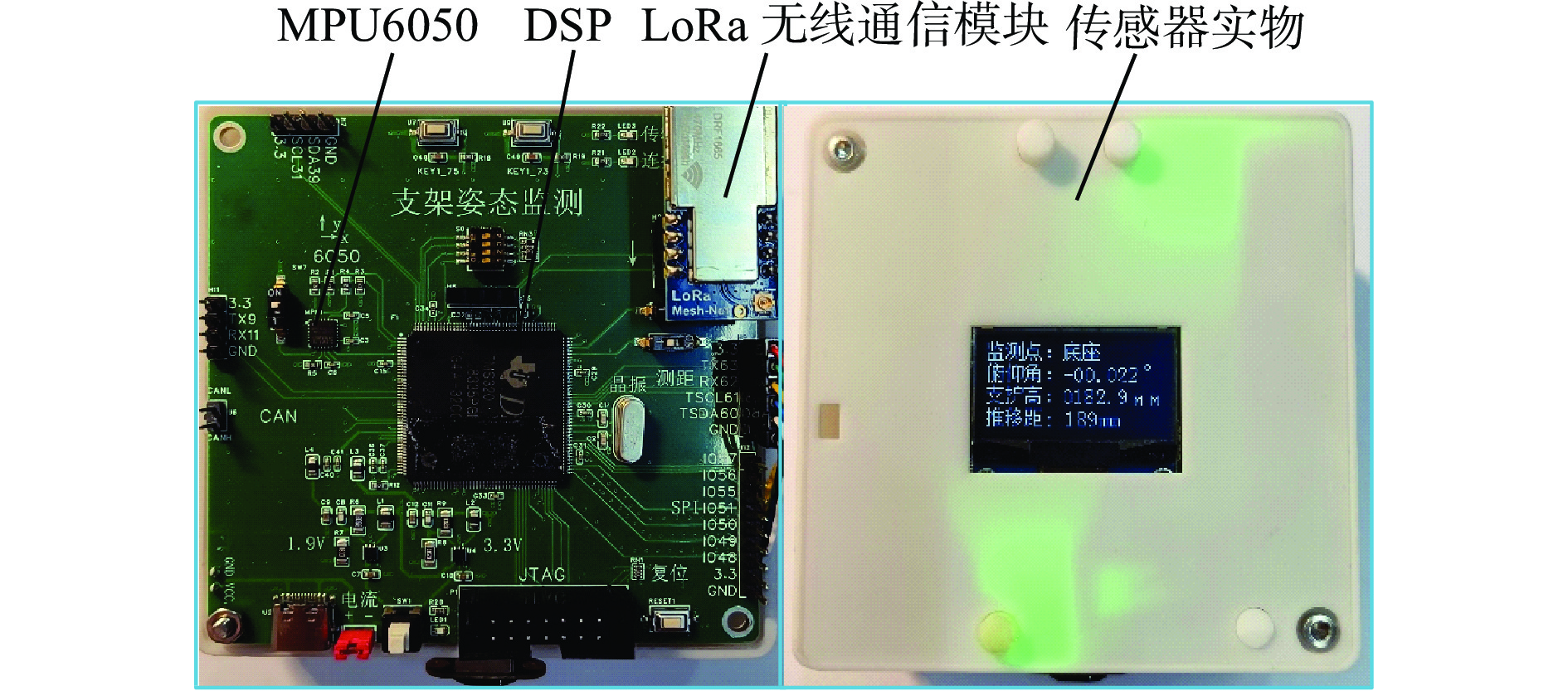
图 3 液压支架关键姿态参数测量系统硬件组成Figure 3. Hardware composition of the key attitude parameter measurement system for hydraulic supports姿态传感器系统硬件结构如图4所示,主要包含DSP控制核心、DC/DC电源稳压模块、姿态角监测模块、测距传感器、OLED显示模块、LoRa无线通信模块、CAN通信模块和供电模块。
TMS320F28335作为控制器,其CPU主频可达150 MHz,采用32位定点架构,具有浮点运算单元,能够快速、高效执行复杂浮点运算。设计2种稳压电路TPS62290和TPS62291,分别为控制器的内核及I/O模块供电。TPS62290通过电阻网络调整输出1.9 V电压,为内核电源供电,保证控制器能够稳定工作在150 MHz频率下,并将该电压作为使能电压,连接至TPS62291的工作使能引脚。TPS62291固定输出3.3 V电压,为IO模块及其他外设供电,以满足控制器的供电及上电顺序要求。
姿态角测量模块MPU6050平行焊接于PCB电路板上,以保证传感器倾角变化与被测位置倾角变化一致。MPU6050与DSP之间使用两线制IIC通信方式。测距传感器与DSP之间使用串行通信接口(Serial Communication Interface,SCI)通信,具备扩展能力。各传感器之间采用LoRa无线方式通信。LoRa模块与DSP之间使用SCI通信。系统采用4.7 V锂离子蓄电池供电,单体电池容量不超过10 A·h,此外也可采用直流电源供电。PCB电路设计为8.5 cm×8.5 cm方形4层双面板,4层铜箔层厚度均为36 μm,内部2层铜箔分别设计为电源层和地层,以增大散热面积,提高过流能力。信号线印制线宽不小于0.254 mm,电源与地线印制线宽不小于0.609 6 mm。硬件设计满足GB/T 3836.4—2010《爆炸性环境 第4部分:由本质安全型“i”保护的设备》[19]和GB/T 3836.18—2017《爆炸性环境 第18部分:本质安全电气系统》[20]的要求。姿态传感器电路实物如图5所示。
2.2 软件设计
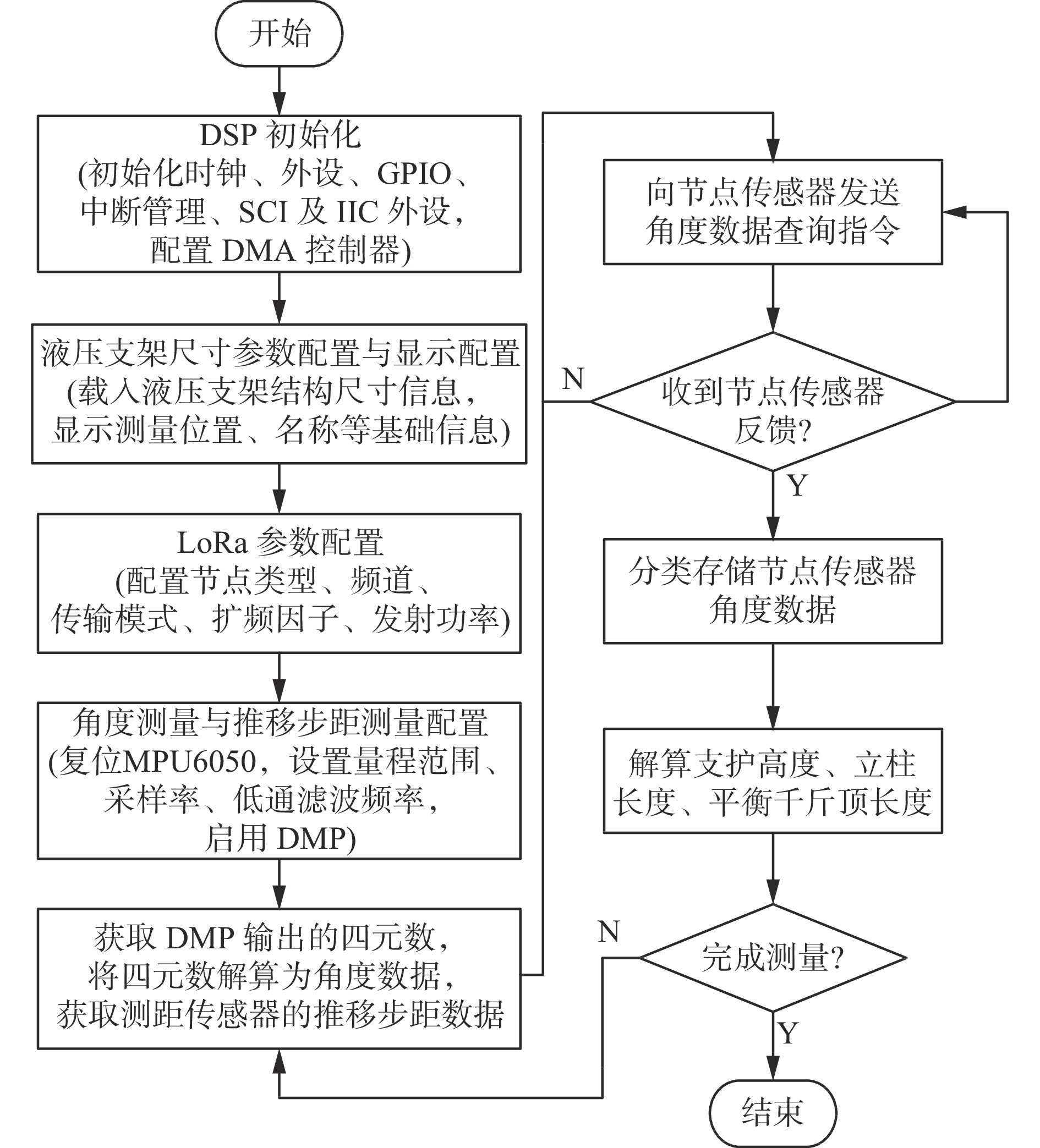
软件部分完成对各电路部件的控制及网关和节点之间的数据传输。以网关传感器程序为例,程序流程主要包括系统状态初始化、外设功能初始化、传感器模块初始化、组网通信配置、网关传感器倾角与推移步距计算、节点数据获取、支护参数计算和信息显示,如图6所示。
网关传感器程序具体实现步骤如下:
1) 进行系统初始化,包括系统时钟分配、片上外设使能、通用输入输出(General Purpose Input/Output Port,GPIO)功能复用、中断管理和片上Flash初始化配置,确保DSP运行在已知状态下。
2) 对SCI进行配置,其中SCI−A用于和LoRa无线通信模块通信,SCI−B用于和测距传感器通信,开启二者的中断接收模式。针对SCI−A配置直接存储器访问 (Direct Memory Access,DMA) 模式,直接进行数据交换。
3) 载入液压支架结构尺寸信息,显示基础信息。LoRa无线通信模块依不同监测位置配置为不同的网络对象。
4) MPU6050使用软件IIC协议进行通信。设置MPU6050的陀螺仪和加速度计的采样率与低通滤波频率。调用MPU6050的DMP库获取加速度计和陀螺仪原始数据融合输出的四元数,通过DSP将四元数解算为倾角值。获取测距传感器数据,得到推移步距。
5) 采用网关查询的方式获取各节点的角度数据,对获取到的数据进行分类和存储,避免因多个节点同时上报数据而造成数据阻塞与冲突问题。将获得的角度数据和支架尺寸参数代入支护参数计算公式,得到液压支架的支护参数。
节点传感器较网关传感器功能简单,主要完成角度测量和数据传输。
3. 测试分析
3.1 姿态传感器角度测量精度测试
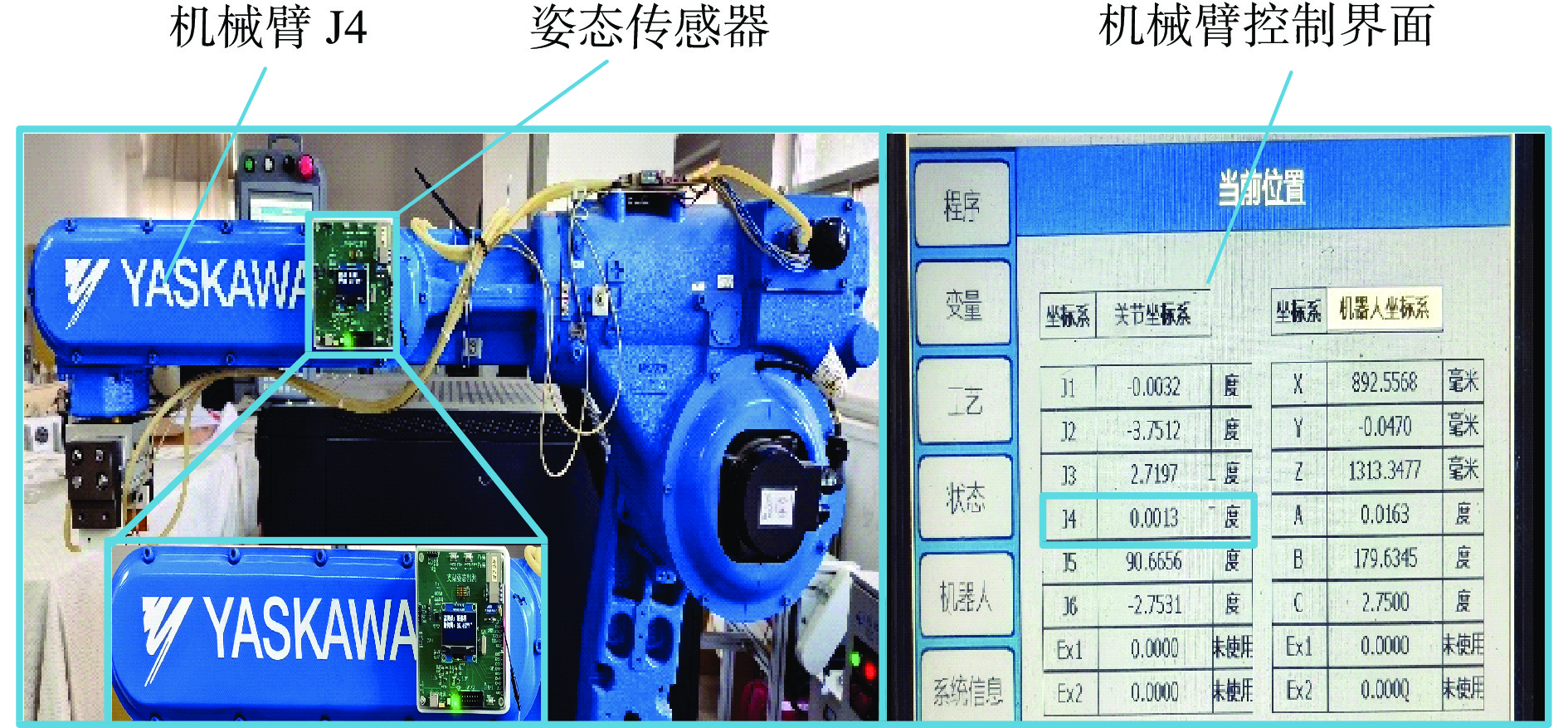
采用YASKAWA−HP20D六自由度机械臂对姿态传感器角度测量精度进行标定。该机械臂内置六自由度角度测量传感器,机械臂每个旋转关节处均有高精度编码器,机械臂运动过程中可实时显示各自由度的角度。将本文设计的姿态传感器平行安装于机械臂J4上,机械臂动作范围为−165~+255°,测量精度为±0.001°。姿态传感器角度测量精度测试平台如图7所示。
![]() 图 7 姿态传感器角度测量精度测试平台Figure 7. Experimental platform for angle measurement accuracy of attitude sensor
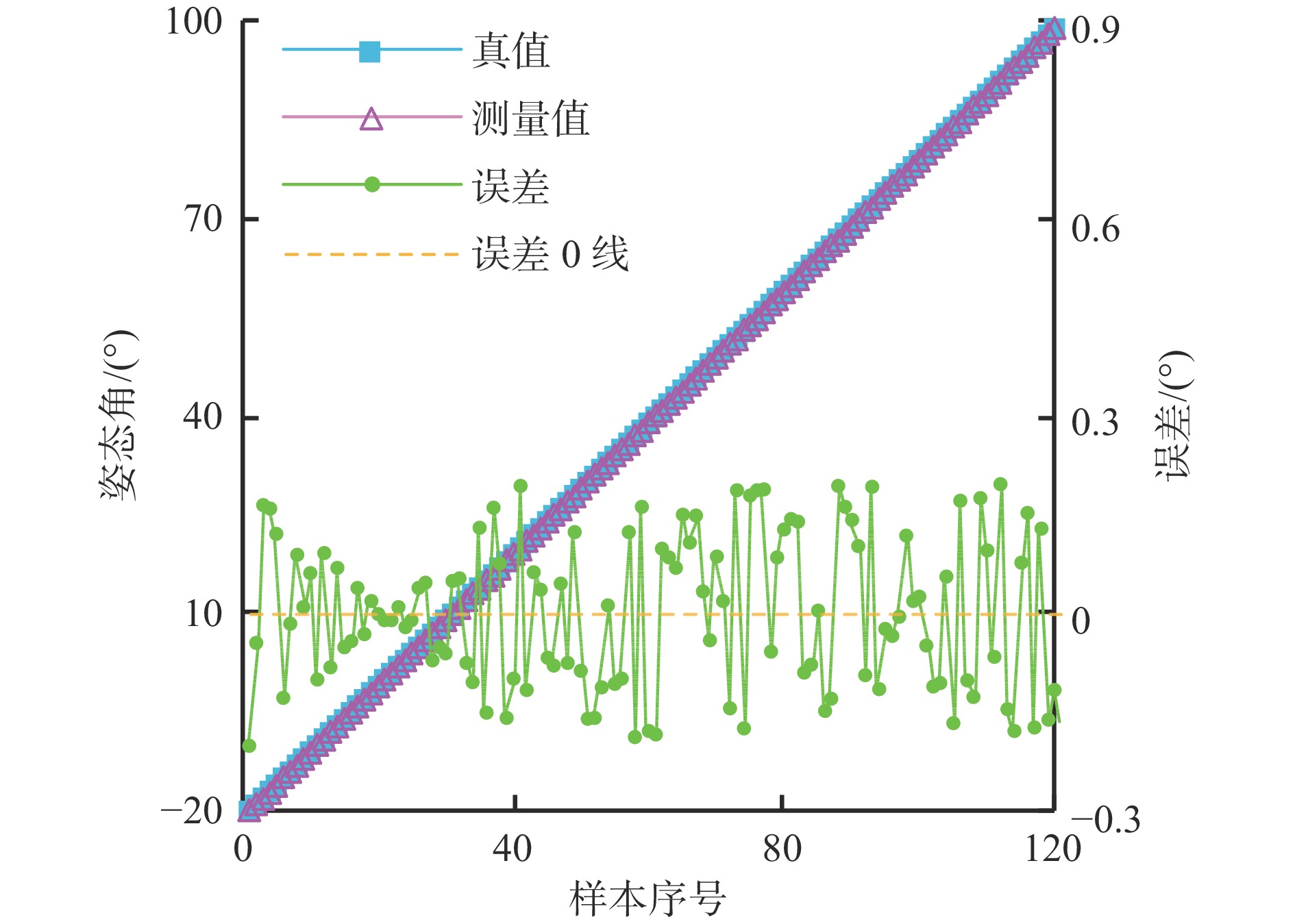
图 7 姿态传感器角度测量精度测试平台Figure 7. Experimental platform for angle measurement accuracy of attitude sensor液压支架的顶梁、底座、掩护梁和前连杆处于支护状态时的极限倾角范围分别为−15~10,−15~10,15~65,25~95°[21]。因此测试中控制机械臂在−20~100°以1°左右的增长幅度摆动,模拟测量底座、前连杆、掩护梁和顶梁与水平面的夹角,共测量120次。将每次机械臂调整后传感器输出的角度作为测量值,机械臂内置测量装置测得的角度作为真值。针对每次变动进行3次测量并取平均值,结果如图8所示。由图8可知,姿态角在−20~100°时,姿态传感器的角度测量误差为−0.2~0.2°,最大误差为0.2°。
![]() 图 8 姿态传感器角度测量精度测试结果Figure 8. Experimental results of angle measurement accuracy of attitude sensor
图 8 姿态传感器角度测量精度测试结果Figure 8. Experimental results of angle measurement accuracy of attitude sensor3.2 液压支架关键姿态参数测量精度测试
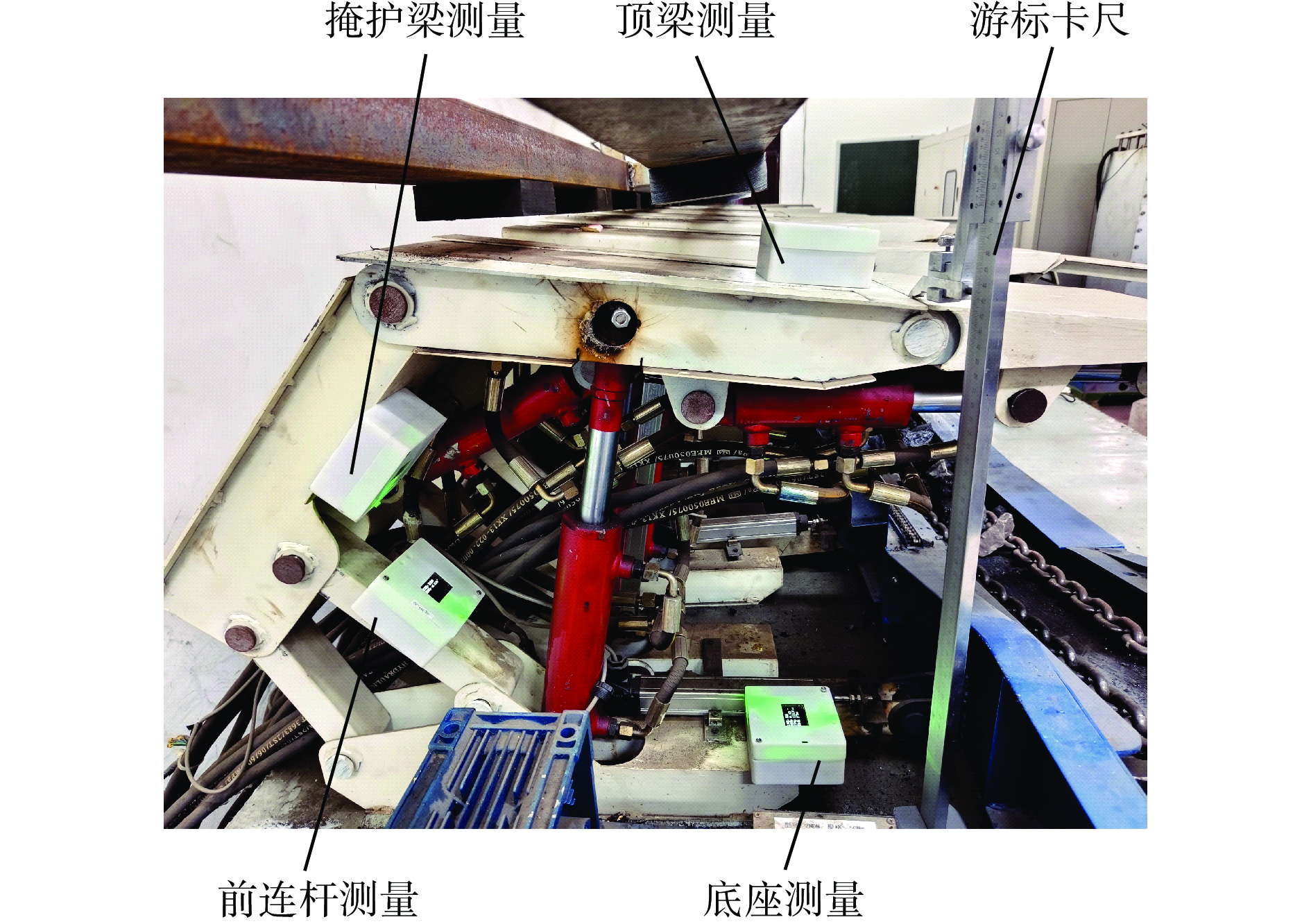
通过双立柱液压支架测试台对液压支架关键姿态参数测量精度进行测试。底座、前连杆、掩护梁和顶梁的姿态传感器以磁铁吸附方式安装,红外激光测距传感器采用粘接方式安装于推移千斤顶顶部,保证与刮板输送机之间无遮挡。液压支架测试平台的尺寸参数见表1,将尺寸参数输入网关传感器。
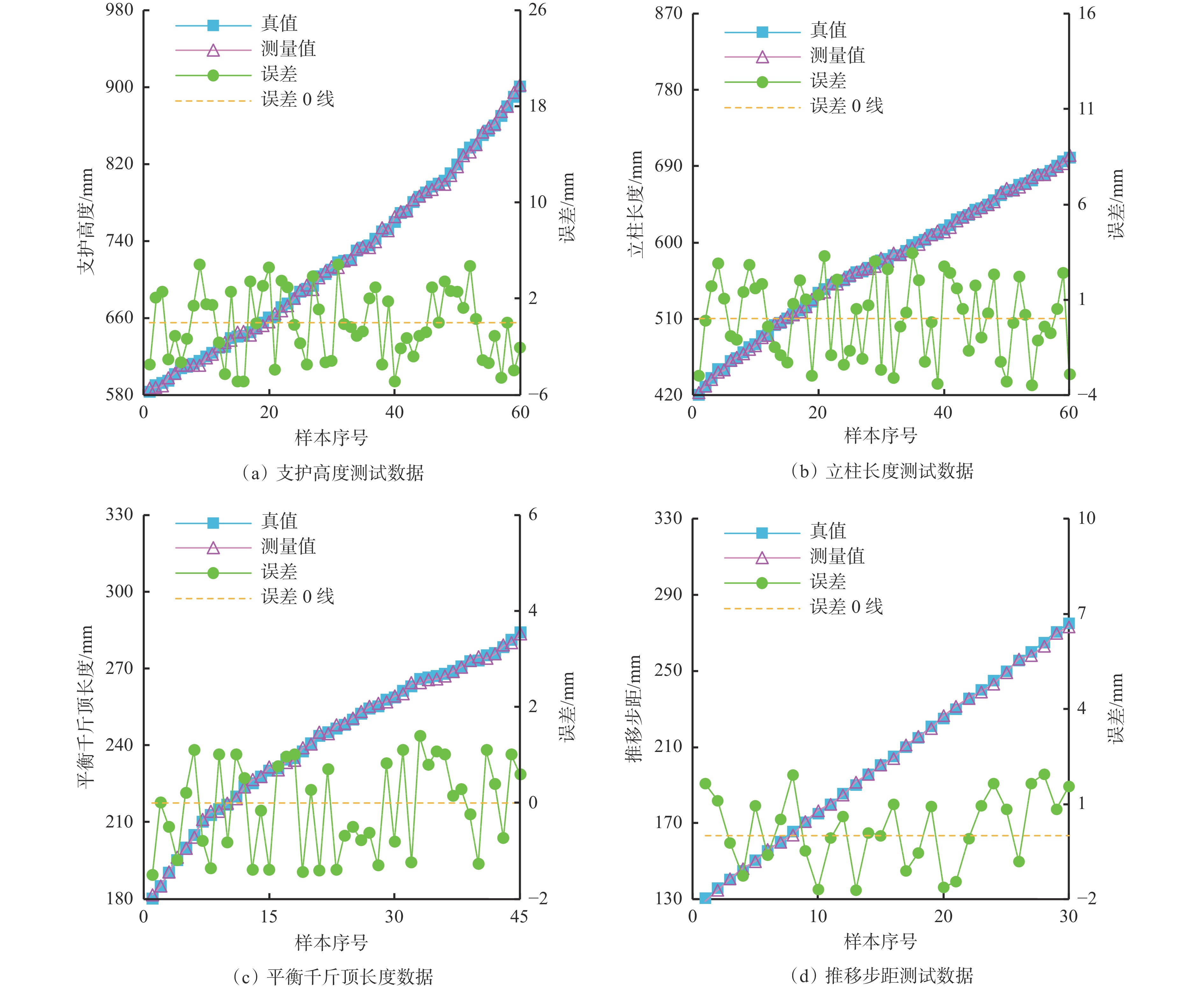
表 1 液压支架测试平台尺寸参数Table 1. Dimensional parameters of hydraulic support experimental platformmm 变量 值 变量 值 变量 值 变量 值 $ {l}_{1} $ 450 $ {l}_{7} $ 286 $ {l}_{13} $ 1 370 $ {h}_{6} $ 289 $ {l}_{2} $ 313 $ {l}_{8} $ 285 $ {h}_{1} $ 131 $ {h}_{7} $ 96 $ {l}_{3} $ 742 $ {l}_{9} $ 197 $ {h}_{2} $ 282 $ {h}_{8} $ 150 $ {l}_{4} $ 484 $ {l}_{10} $ 391 $ {h}_{3} $ 114 $ {h}_{9} $ 300 $ {l}_{5} $ 475 $ {l}_{11} $ 211 $ {h}_{4} $ 206 $ {h}_{10} $ 114 $ {l}_{6} $ 632 $ {l}_{12} $ 519 $ {h}_{5} $ 180 测试平台与传感器布置如图9所示。采用以下4种方式对液压支架姿态进行调节:① 固定平衡千斤顶长度不变,仅增加立柱长度。② 固定立柱长度,仅增加平衡千斤顶长度。③ 同时增加立柱与平衡千斤顶长度。④ 仅增加推移油缸长度。以传感器输出的数据作为测量值,游标卡尺测量结果为真值。每次姿态改变时测量并记录支护高度、立柱长度、平衡千斤顶长度和推移步距4个参数。共得到支护高度样本60组、立柱长度样本60组、平衡千斤顶长度样本45组和推移步距样本30组。
各参数的测量数据及误差分布如图10所示。由图10(a)可知,支护高度为580~980 mm时,支护高度测量误差为−4.9~4.9 mm,最大误差为4.9 mm。由图10(b)可知,立柱长度为420~870 mm时,立柱长度测量误差为−3.4~3.5 mm,最大误差为3.5 mm。由图10(c)可知,平衡千斤顶长度为180~330 mm时,平衡千斤顶长度测量误差为−1.5~1.39 mm,最大误差为−1.5 mm。由图10(d)可知,推移步距为130~330 mm时,推移步距测量误差为−1.6~1.9 mm,最大误差为1.9 mm。
![]() 图 10 液压支架姿态参数测量数据及误差分布Figure 10. Measurement data and error distribution of hydraulic support attitude parameters
图 10 液压支架姿态参数测量数据及误差分布Figure 10. Measurement data and error distribution of hydraulic support attitude parameters3.3 误差统计分析
对测试得到的姿态角θ、支护高度H、立柱长度M、平衡千斤顶长度N和推移步距$ S $进行误差分析。计算每个参数的最大绝对误差△e、平均绝对误差$ \overline{e} $、标准差$ \sigma $、最大百分比相对误差$ {\Delta }R $和平均百分比相对误差$ \overline{R} $。计算结果见表2。
表 2 测试误差统计分析结果Table 2. Experimental error statistical analysis results参数 ∆e $ \overline{e} $ $ \sigma $ $ \Delta R$/% $ \overline{R} $/% θ 0.2° 0.1° 0.06 1.00 0.39 H 4.9 mm 2.5 mm 1.40 0.78 0.35 M 3.5 mm 1.7 mm 1.00 0.72 0.31 N 1.5 mm 0.9 mm 0.40 0.83 0.36 S 1.9 mm 0.2 mm 0.90 1.27 0.98 由表2可得,姿态角、支护高度、立柱长度、平衡千斤顶长度和推移步距的最大绝对误差分别为0.2°和4.9,3.5,1.5,1.9 mm;平均绝对误差分别为0.1°和2.5,1.7,0.9,0.2 mm;最大百分比相对误差分别为1.00%,0.78%,0.72%,0.83%,1.27%;平均百分比相对误差分别为0.39%,0.35%,0.31%,0.36%,0.98%。系统测量误差满足GB/T 25974.4—20xx《煤矿用液压支架 第 4 部分:电液控制系统技术条件》(征求意见稿)中的要求:角度测量误差应不大于±1°,高度测量误差应不大于±1%,推移行程测量误差应不大于5 mm。
3.4 间接测量值误差模型与算例分析
3.4.1 间接测量值误差模型
由式(7)、式(8)可知,液压支架的支护高度、立柱长度和平衡千斤顶长度(间接测量值)是顶梁、掩护梁、前连杆和底座倾角(直接测量值)的多元函数。因此,间接测量值的误差是各直接测量值误差的函数。由误差传递函数公式可得支护高度、立柱长度、平衡千斤顶长度的误差函数分别为
$$ \Delta H=\left(\frac{\partial H}{\partial \alpha }\right)\Delta \alpha +\left(\frac{\partial H}{\partial \omega }\right)\Delta \omega +\left(\frac{\partial H}{\partial \beta }\right)\Delta \beta $$ (9) $$\Delta M=\left(\frac{\partial M}{\partial \alpha }\right)\Delta \alpha +\left(\frac{\partial M}{\partial \omega }\right)\Delta \omega +\left(\frac{\partial M}{\partial \beta }\right)\Delta \beta $$ (10) $$ \Delta N=\left(\frac{\partial N}{\partial \alpha }\right)\Delta \alpha +\left(\frac{\partial N}{\partial \omega }\right)\Delta \omega +\left(\frac{\partial N}{\partial \beta }\right)\Delta \beta $$ (11) 式中$ \Delta \alpha ,\;\Delta \omega ,\;\Delta \beta $分别为$ \alpha ,\;\omega ,\;\beta $的变化值。
支护状态的改变主要来自于顶梁、掩护梁和前连杆的倾角变化,底座倾角变化不明显,因此仅考虑前面3个变量的影响。分析式(7)可知,平衡千斤顶长度N与底座倾角$ \gamma $和前连杆倾角$ \beta $均无关,其误差传递函数仅为顶梁倾角α的一元函数,误差影响因素单一,因此不再单独分析其误差函数。
3.4.2 算例分析
以ZY9000/22/45D型液压支架为例,分析不同顶梁倾角$ \alpha $、掩护梁倾角$\omega $和前连杆倾角$ \beta $条件下的支护高度、立柱长度函数的误差。液压支架尺寸参数见表3。
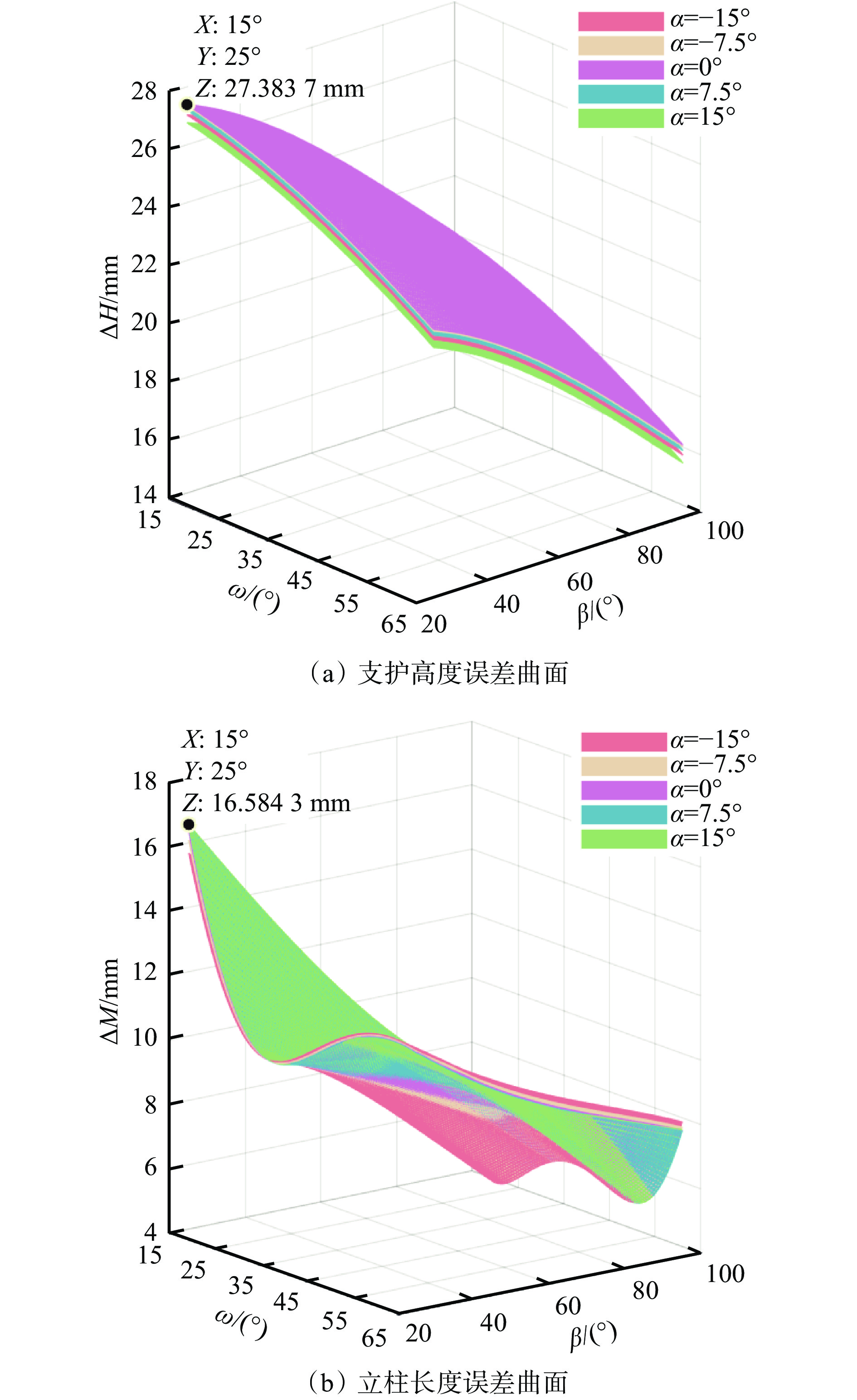
表 3 ZY9000/22/45D型液压支架尺寸参数Table 3. Dimensional parameters of ZY9000/22/45D hydraulic supportmm 变量 值 变量 值 变量 值 变量 值 $ {l}_{1} $ 850 $ {l}_{7} $ 525 $ {l}_{13} $ 2910 $ {h}_{6} $ 540 $ {l}_{2} $ 850 $ {l}_{8} $ 525 $ {h}_{1} $ 350 $ {h}_{7} $ 150 $ {l}_{3} $ 1080 $ {l}_{9} $ 940 $ {h}_{2} $ 920 $ {h}_{8} $ 150 $ {l}_{4} $ 1023 $ {l}_{10} $ 1160 $ {h}_{3} $ 280 $ {h}_{9} $ 560 $ {l}_{5} $ 1845 $ {l}_{11} $ 235 $ {h}_{4} $ 215 $ {h}_{10} $ 390 $ {l}_{6} $ 1940 $ {l}_{12} $ 930 $ {h}_{5} $ 215 掩护梁倾角$ \omega $的取值范围为15~65°,前连杆倾角$ \beta $的取值范围为25~95°,顶梁倾角$ \alpha $选取−15,−7.5,0,7.5,15°。由表2可知$ \Delta \alpha =\Delta \beta =\Delta \omega $=0.2° ,将角度误差和支架尺寸参数代入式(9)和式(10),分别绘制液压支架支护高度误差$\Delta H $与立柱长度误差$\Delta M $随$ \alpha $,$ \beta $,$ \omega $的变化曲面,如图11所示。
![]() 图 11 支护高度与立柱长度误差曲面Figure 11. Curved surface of support height error and column length error
图 11 支护高度与立柱长度误差曲面Figure 11. Curved surface of support height error and column length error分析图11(a)可知,当$ \omega $为15~65°,$ \beta $为25~95°时,液压支架支护高度误差$\Delta H $整体呈下降趋势。当$ \omega $=15°,$ \beta $=25°,$ \alpha $=0°时,$\Delta H $取得最大值27.4 mm。分析图11(b)可知,当$ \omega $为15~65°,$ \beta $为25~95°时,立柱长度误差$\Delta M $呈先降低后增高再降低的趋势。当$ \omega $=15°,$ \beta $=25°,$ \alpha $=15°时,$\Delta M $取得最大值16.6 mm。
4. 结论
1) 提出液压支架姿态关键参数测量方法,即对液压支架底座、前连杆、掩护梁和顶梁与水平面的夹角及推移步距采用直接测量方法,对支护高度、立柱长度、平衡千斤顶长度采用间接测量方法。
2) 设计了液压支架姿态关键参数测量系统,该系统以DSP为核心,具备更强的数据处理能力。以MPU6050为倾角测量元件,通过红外激光传感器获取推移步距,研制了姿态传感器。
3) 测试结果表明,姿态角测量的最大绝对误差为0.2°,支护高度、立柱长度、平衡千斤顶长度测量的最大百分比相对误差分别为0.78%,0.72%,0.83%,推移步距测量的最大绝对误差为1.9 mm。以ZY9000/22/45D型液压支架为例,分析其在不同姿态角范围下的误差分布,得到支护高度最大测量误差为27.4 mm,立柱长度最大测量误差为16.6 mm。系统测量误差满足GB/T 25974.4—20xx《煤矿用液压支架 第 4 部分:电液控制系统技术条件》(征求意见稿)中的要求,验证了该系统能够实现液压支架关键姿态参数的准确测量。
-
![]()
图 3 采煤机滚筒截割高度模板生成过程
Figure 3. Generating process for cutting height template of shearer drum
表 1 工况划分
Table 1 Classification of working condition
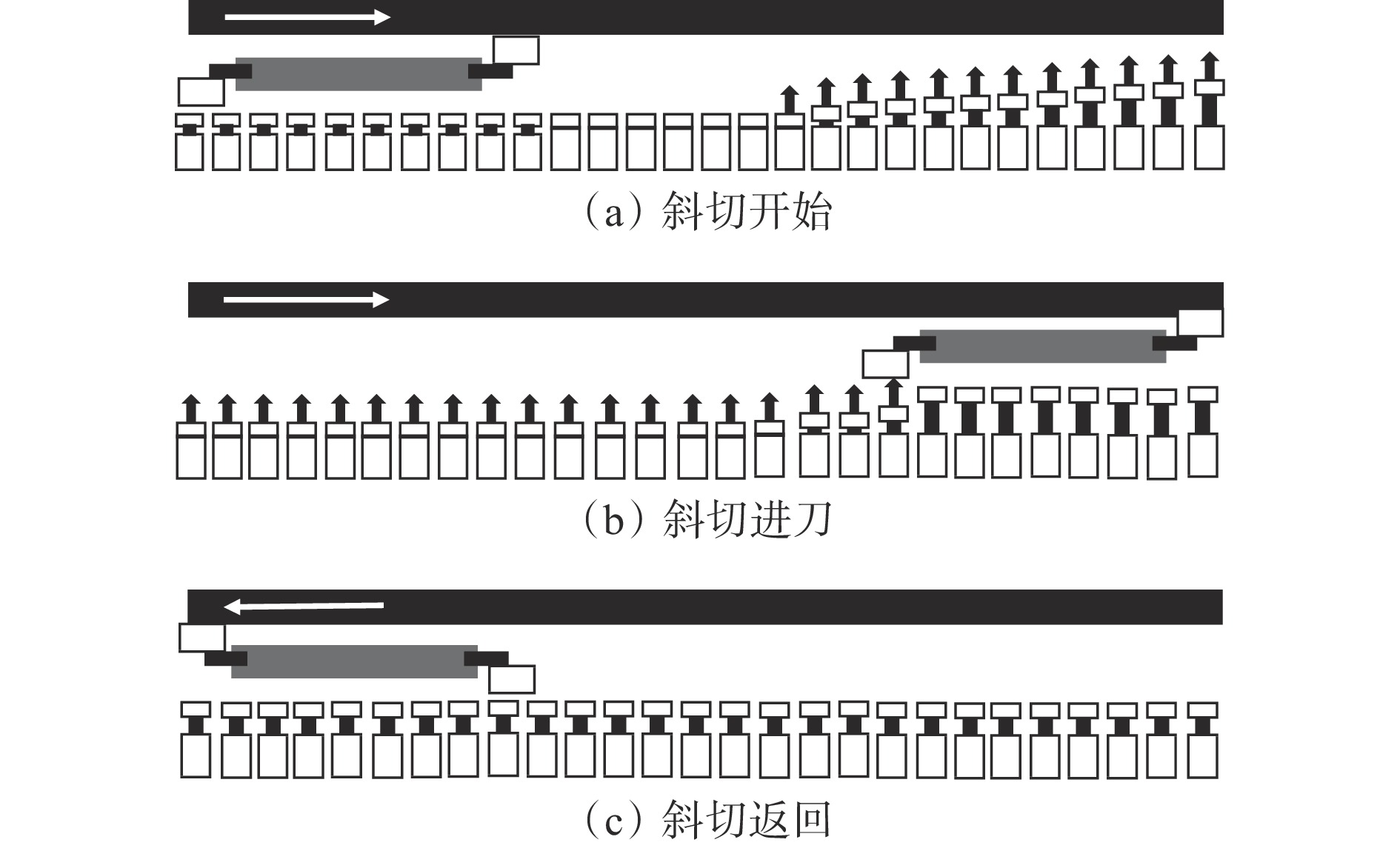
工况 截割工艺 正常区域 从机头向机尾正常割煤 三角煤区域 清浮煤 清浮煤返回 斜切进刀 斜切进刀返回  下载: 导出CSV
下载: 导出CSV
表 2 807工作面部分采煤机特征数据
Table 2 Part of the characteristic data of shearer in 807 working face
时间 温度/℃ 电流/A 俯仰角/(°) 横滚角/(°) 牵引速度/(m·min−1) 2023-03-27 T03:03 75.26 84.27 −0.06 −0.49 7.14 2023-03-29 T02:06 70.17 68.23 1.28 −0.16 6.15 2023-03-29 T03:46 76.25 43.75 0.61 −0.21 8.16 2023-03-30 T01:37 71.96 80.80 2.98 −0.35 7.96
下载: 导出CSV
表 3 部分截割高度模板数值
Table 3 Partial values of cutting height template
p h1/cm h2/cm 8 265.0 175.1 28 257.9 182.7 48 233.8 179.4 68 242.8 182.7 88 240.9 179.0 108 237.6 188.6 128 241.7 182.8 146 188.9 194.9
下载: 导出CSV
表 4 不同模型正常区域滚筒高度误差对比
Table 4 Comparison of drum height errors in normal areas of different models
模型 滚筒 NRMSE MAE 最大偏差/cm RBF 左滚筒 0.566 0.039 15.356 右滚筒 0.444 0.035 25.442 ESN 左滚筒 0.383 0.025 12.815 右滚筒 0.376 0.037 22.707 C−ESN 左滚筒 0.338 0.023 9.956 右滚筒 0.164 0.016 11.471
下载: 导出CSV
表 5 不同模型三角煤区域滚筒高度误差对比
Table 5 Comparison of drum height errors in triangular coal regions of different models
模型 滚筒 NRMSE MAE 最大偏差/cm RBF 左滚筒 0.434 0.025 24.078 右滚筒 0.267 0.010 36.704 ESN 左滚筒 0.372 0.040 24.368 右滚筒 0.221 0.029 15.366 C−ESN 左滚筒 0.140 0.018 12.910 右滚筒 0.073 0.009 7.940
下载: 导出CSV
-
[1] 王国法,张良,李首滨,等. 煤矿无人化智能开采系统理论与技术研发进展[J]. 煤炭学报,2023,48(1):34-53. WANG Guofa,ZHANG Liang,LI Shoubin,et al. Progresses in theory and technological development of unmanned smart mining system[J]. Journal of China Coal Society,2023,48(1):34-53.
[2] 赵亦辉,赵友军,周展. 综采工作面采煤机智能化技术研究现状[J]. 工矿自动化,2022,48(2):11-18,28. ZHAO Yihui,ZHAO Youjun,ZHOU Zhan. Research status of intelligent technology of shearer in fully mechanized working face[J]. Industry and Mine Automation,2022,48(2):11-18,28.
[3] 梁吉智,韩培毅,郭天骏,等. 综采工作面智能化装备关键技术与应用[J]. 煤炭科学技术,2021,49(增刊1):59-62. LIANG Jizhi,HAN Peiyi,GUO Tianjun,et al. Key technology and application of intelligent equipment in fully-mechanized coal mining face[J]. Coal Science and Technology,2021,49(S1):59-62.
[4] 原长锁,王峰. 综采工作面透明化开采模式及关键技术[J]. 工矿自动化,2022,48(3):11-15,31. YUAN Changsuo,WANG Feng. Transparent mining mode and key technologies of fully mechanized working face[J]. Journal of Mine Automation,2022,48(3):11-15,31.
[5] 李旭,吴雪菲,田野,等. 基于数字煤层的综采工作面精准开采系统[J]. 工矿自动化,2021,47(11):16-21. LI Xu,WU Xuefei,TIAN Ye,et al. Digital coal seam-based precision mining system for fully mechanized working face[J]. Industry and Mine Automation,2021,47(11):16-21.
[6] 金锋,罗会强. 智能化采煤工作面运行现状及技术展望[J]. 工矿自动化,2021,47(增刊2):4-6. JIN Feng,LUO Huiqiang. Operation status and technology prospect of intelligent coal mining face[J]. Industry and Mine Automation,2021,47(S2):4-6.
[7] 张翔. 基于记忆截割的采煤机自适应截割控制研究[J]. 机械管理开发,2022,37(8):139-140,143. ZHANG Xiang. Research on adaptive cutting control of shearer based on memory cutting[J]. Mechanical Management and Development,2022,37(8):139-140,143.
[8] 黎青. 采煤机自主截割系统架构及关键技术研究[J]. 煤炭技术,2023,42(4):187-190. LI Qing. Research of structure and key technical of shearer’s autonomous cutting system[J]. Coal Technology,2023,42(4):187-190.
[9] 马腾飞. 采煤机自动调高控制系统的设计与试验研究[J]. 机械管理开发,2022,37(3):294-295,298. MA Tengfei. Design and experimental research of automatic height adjustment control system for coal mining machine[J]. Mechanical Management and Development,2022,37(3):294-295,298.
[10] 原彬,王义亮,杨兆建. 斜切工况下采煤机滚筒截割煤岩仿真分析[J]. 工矿自动化,2018,44(1):64-68. YUAN Bin,WANG Yiliang,YANG Zhaojian. Simulation analysis of shearer drum cutting coal-rock under oblique cutting condition[J]. Industry and Mine Automation,2018,44(1):64-68.
[11] 刘鹏,孟磊,王勃,等. 基于位姿测量与煤层DEM的采煤机滚筒自动调高方法[J]. 煤炭学报,2015,40(2):470-475. LIU Peng,MENG Lei,WANG Bo,et al. An automatic height adjustment method for shearer drums based on pose measurement and coal seam DEM[J]. Journal of China Coal Society,2015,40(2):470-475.
[12] 高有进,杨艺,常亚军,等. 综采工作面智能化关键技术现状与展望[J]. 煤炭科学技术,2021,49(8):1-22. GAO Youjin,YANG Yi,CHANG Yajun,et al. Status and prospect of key technologies of intelligentization of fully-mechanized coal mining face[J]. Coal Science and Technology,2021,49(8):1-22.
[13] 郭鑫. 基于电液比例控制的采煤机自动调高系统的研究[J]. 机械管理开发,2018,33(12):101-103. GUO Xin. Research on automatic height adjustment system of shearer based on electro-hydraulic proportional control[J]. Mechanical Management and Development,2018,33(12):101-103.
[14] 张远辉,刘章棋,陈虹均. 基于模糊算法采煤机滚筒高度控制性能研究[J]. 液压与气动,2020(8):82-87. DOI: 10.11832/j.issn.1000-4858.2020.08.013 ZHANG Yuanhui,LIU Zhangqi,CHEN Hongjun. Height control performance of shearer drum based on fuzzy algorithm[J]. Chinese Hydraulics & Pneumatics,2020(8):82-87. DOI: 10.11832/j.issn.1000-4858.2020.08.013
[15] 赵有生,邸晟钧,王占全,等. 改进的人工鱼群算法采煤机调高控制策略[J]. 煤炭工程,2020,52(2):136-141. ZHAO Yousheng,DI Shengjun,WANG Zhanquan,et al. Improved artificial fish swarm algorithm for height control strategy of shearer[J]. Coal Engineering,2020,52(2):136-141.
[16] 李森,李重重,刘清. 基于透明地质的综采工作面规划截割协同控制系统[J]. 煤炭科学技术,2023,51(4):175-184. LI Sen,LI Zhongzhong,LIU Qing. Planned cutting and collaborative control system for fully-mechanized mining face based on transparent geology[J]. Coal Science and Technology,2023,51(4):175-184.
[17] 杨芸. 采煤机现状与发展[J]. 工矿自动化,2017,43(1):26-28. YANG Yun. Status and development of shearer[J]. Industry and Mine Automation,2017,43(1):26-28.
[18] JAEGER H,HAAS H. Harnessing nonlinearity:predicting chaotic systems and saving energy in wireless communication[J]. Science,2004,304(5667):78-80. DOI: 10.1126/science.1091277
[19] 张昭昭,朱应钦,乔俊飞,等. 一种基于行为空间的回声状态网络参数优化方法[J]. 信息与控制,2021,50(5):556-565. ZHANG Zhaozhao,ZHU Yingqin,QIAO Junfei,et al. An echo state network parameter optimization method based on behavior space[J]. Information and Control,2021,50(5):556-565.
[20] 刘清,韩秀琪,徐兰欣,等. 综采工作面采煤机和液压支架协同控制技术[J]. 工矿自动化,2020,46(5):43-48. LIU Qing,HAN Xiuqi,XU Lanxin,et al. Cooperative control technology of shear and hydraulic support on fully-mechanized coal mining face[J]. Industry and Mine Automation,2020,46(5):43-48.
[21] ZHANG Zhaozhao,LIU Yue,ZHU Yingqin,et al. An online self-adaptive RBF network algorithm based on the Levenberg-Marquardt algorithm[J]. Applied Artificial Intelligence,2022,36(1):3794-3809.
[22] 李重重,刘清. 基于截割顶底板高度预测模型的采煤机自动调高技术[J]. 工矿自动化,2024,50(1):9-16. LI Zhongzhong,LIU Qing. Automatic height adjustment technology of shearer based on cutting roof and floor height prediction model[J]. Journal of Mine Automation,2024,50(1):9-16.
计量
- 文章访问数: 96
- HTML全文浏览量: 31
- PDF下载量: 12
