
Research on fault positioning of underground power cable
-
摘要: 针对传统井下电力电缆故障定位方法依赖主观参数选择和抗噪性能较差,无法满足强噪声背景下井下电力电缆故障精确定位要求的问题,提出了一种基于樽海鞘群算法(SSA)优化变分模态分解(VMD)并结合改进型Teager能量算子(NTEO)的井下电力电缆故障定位方法。针对VMD在信号分解上存在的模态混叠、过分解和欠分解问题,采用SSA以模糊熵为适应度函数对VMD模态数K和惩罚因子$ \alpha $ 2个参数进行优化,得到更能反映故障特征信息的本征模态函数;采用NTEO对本征模态函数进行首波波头标定,得到首末两端的波头到达时刻,根据双端测距法得出故障位置。采用PSCAD/EMTDC进行井下电力电缆故障仿真,模拟具有强背景噪声的井下故障信号,结果表明:① 在理想电流信号中加入9 ,12 dB噪声后,SSA−VMD的信噪比最低,皮尔逊相关系数最大,说明SSA−VMD在最大程度降噪的同时,能很好地保留信号的特征信息。② 在不同过渡电阻下,SSA−VMD−NTEO的定位精度较高。③ 在不同故障相角下,SSA−VMD−NTEO在采样点上出现不同,但定位位置没有改变,依旧保持较高的定位精度。④ 在不同故障距离下,SSA−VMD−NTEO均能保证较高的定位精度。⑤ 在井下较大噪声和10 MHz采样频率下,SSA−VMD−NTEO较小波模极大值和VMD+NTEO 2种方法的定位精度具有明显优势。Abstract: The traditional underground power cable fault positioning method relies on subjective parameter selection and noise resistance is poor. It cannot meet the accurate fault positioning requirements of underground power cable under strong noise background. In order to solve the above problems, a fault positioning method of underground power cable based on salp swarm algorithm (SSA) optimizing variational mode decomposition (VMD) combined with novel Teager energy operator (NTEO) is proposed. In response to the problem of modal aliasing, over decomposition, and under decomposition in signal decomposition of VMD, SSA is used to optimize the modal number K and penalty factor α of VMD parameters using fuzzy entropy as the fitness function. The intrinsic modal function that better reflects the fault feature information is obtained. NTEO is used to calibrate the first wave head to obtain the arrival time of the wave heads at both ends. The fault position is determined based on the dual end distance measurement method. PSCAD/EMTDC is used for underground power cable fault simulation. It simulates underground fault signals with strong background noise. The results show the following points. ① After adding 9 dB and 12 dB noise to the ideal current signal, the signal-to-noise ratio of SSA-VMD is the lowest, and the Pearson correlation coefficient is the highest. It indicates that SSA-VMD can effectively preserve the characteristic information of the signal while minimizing noise. ② Under different transition resistances, the positioning precision of SSA-VMD-NTEO is relatively high. ③ Under different fault phase angles, although SSA-VMD-NTEO may have different sampling points, the positioning position remains unchanged and still maintains high precision. ④ SSA−VMD-NTEO can ensure high positioning precision at different fault distances. ⑤ Under high underground noise and a sampling frequency of 10 MHz, SSA-VMD-NTEO has significant advantages in positioning precision compared to wavelet modulus maximum and VMD+NTEO methods.
-
0. 引言
带式输送机是井下煤炭运输的关键设备,在煤矿带式输送机运输煤流过程中,可能有锚杆、木条、铁块、纺织物等异物掺杂在煤块中,易造成输送带损毁甚至撕裂,引发安全事故,且这些异物还可能对煤炭的质量造成一定的影响。因此,实时、精准识别带式输送机异物对于确保煤矿安全生产尤为重要[1]。
传统的带式输送机异物检测方法主要包括人工检测法、金属探测器检测法、雷达检测法3种[2]。人工检测法效率低、工作量大;金属探测器检测法检测类型不全面,只能检测金属类异物;雷达检测法成本高、难以广泛应用。随着目标检测技术的发展,众多学者利用深度学习方法进行异物识别。基于深度学习的目标检测算法主要分为Two−stage和One−stage 2类。Two−stage代表算法有R−CNN系列,其将输入图像先经过候选框生成网络,再经过分类网络对候选框中内容进行分类[3]。吴守鹏等[4]提出了一种Faster−RCNN+双向金子塔网络的运煤输送带异物识别模型,有效提升了小尺寸异物的检测能力。One−stage代表算法有YOLO系列,该类算法直接对网络进行端对端训练,生成的结果中同时包含位置和类别信息。郝帅等[5]提出一种融合卷积注意力模型的YOLOv5煤矿输送带异物检测算法,较好地解决了异物目标检测时易受煤尘干扰、输送带高速运动影响目标检测精度等问题。任国强等[6]采用Fast YOLOv3算法,利用StiPic数据增强方法提高对胶带运输异物的平均检测精度。陈永等[7]利用稀疏化和通道剪枝方法对YOLOv3模型进行压缩,构建了轻量级异物检测模型,其检测速度分别是YOLOv3模型和Faster R−CNN模型的1.3,3.4倍。杨锦辉等[8]在YOLOv5s网络中引入GhostConv卷积减少模型参数量,实现了检测速度的提升。胡璟皓等[9]采用Focal Loss函数替代YOLOv3模型中的交叉熵损失函数及调整最佳超参数来平衡样本之间比例,有效解决了现有非煤异物图像识别法识别目标单一、模型缺乏定位等问题。
基于深度学习的目标检测算法在异物检测中具有较好的识别效果,但模型内存需求大,检测速度慢;轻量化深度学习网络能够大幅减少模型内存需求,提升检测速度,然而,在井下弱光环境中检测精度低。为此,本文提出了一种基于Faster−YOLOv7的带式输送机异物实时检测方法。通过轻量化设计YOLOv7主干网络来降低模型的内存需求,进而提升模型对异物的检测速度;利用限制对比度自适应直方图均衡化(Contrast Limited Adaptive Histogram Equalization,CLAHE)[10]算法来提升煤矿井下弱光环境下的检测效果;设计有效通道注意力机制来缓解高层信息丢失对目标检测精度的影响;使用Alpha−IoU回归损失函数提高检测精度。
1. 异物检测流程
基于Faster−YOLOv7的带式输送机异物实时检测流程如图1所示。首先,采集带式输送机运煤监控视频数据。其次,截取监控视频中包含异物的数据帧,构建异物数据集,并通过数据增强操作来提高数据集质量。然后,对Faster−YOLOv7异物检测模型进行训练,并存储最优的权重文件。最后,输入实时监控视频数据,经过图像增强预处理后,读取Faster−YOLOv7模型实现异物检测,并存储异物信息。
2. 图像增强
煤矿井下弱光环境导致摄像头采集的实时图像存在模糊、异物边缘不清晰等问题,从而影响模型的推理结果,本文采用CLAHE算法对采集到的图像进行弱光增强,通过限制对比度,避免直方图中出现陡峭部分。CLAHE裁剪再分配过程如图2所示,带式输送机上运煤视频图像经过限制对比度自适应直方图均衡化处理后的效果如图3所示。可看出经过CLAHE算法处理后,在图像较暗处物体的边缘变得清晰,特征较原图更明显。
为了客观评价CLAHE算法对煤矿井下带式输送机运煤图像弱光增强的有效性,选取Brenner梯度函数、Energy of Gradient函数、Roberts函数作为评价指标来衡量图像增强后的清晰度,评价结果见表1。可看出经过CLAHE算法处理后的Brenner函数值、Energy of Gradient函数值、Roberts函数值均大于原图,说明该算法可使煤矿井下带式输送机运煤视频图像更清晰,表明CLAHE算法可有效解决煤矿井下弱光环境导致的图像不清晰、对比度低、边缘信息模糊等问题,达到了图像增强的效果。经过弱光环境图像增强,可提高图像的对比度,使模型的推理结果更精准。
表 1 图像增强评价结果Table 1. Evaluation results of image enhancement评价指标 原图 CLAHE Brenner函数值 81.447 152.479 Energy of Gradient函数值 55.311 99.494 Roberts函数值 103.655 186.282 3. 改进YOLOv7模型
YOLOv7模型[11]主要由Input、Backbone、Head 3个部分组成。Input部分沿用YOLOv5采取的mosaic数据增强、自适应锚框计算、图像自适应缩放等对数据进行预处理。Backbone部分用于特征提取。Head部分主要由SPPCSPC模块、ELAN−H模块、REP模块等组成,其中SPPCSCP模块[12]通过最大池化操作来获得不同的感受野,使网络适应不同分辨率的图像;ELAN−H模块[13]通过控制最短和最长梯度路径,使网络能够学习更多特征,且具有更强的鲁棒性;REP模块[14]通过结构重参数实现训练和推理时的解耦合,降低网络的计算量,提升速度。然而,YOLOv7模型内存需求大,难以满足在嵌入式设备上实现井下带式输送机异物实时、精准检测的需求。鉴此,本文设计了Faster−YOLOv7模型,其网络结构如图4所示。
3.1 主干特征提取网络轻量化
YOLOv7主干网络的核心模块是ELAN结构[15],如图5所示,该结构的优势是在每个branch操作中,输入和输出的通道数保持一致,符合设计网络的高效准则之一。然而采用原始主干网络进行特征提取,所得到的模型内存需求大,难以部署在嵌入式设备上实现实时异物检测[16]。因此,本文采用MobileNetv3[17]作为主干网络来构建Faster−YOLOv7。
Bneck是MobileNetv3的核心模块,主要由通道可分离卷积、压缩与激励网络(Squeeze-and-Excitation,SE)通道注意力机制、残差连接实现,其结构如图6所示。首先经过$ 1 \times 1 $卷积操作实现升维。其次经过$ 3 \times 3 $ 深度可分离卷积保持通道数不变。再次经过SE通道注意力模块,使网络通过学习来自动获取每个特征通道的重要程度。在SE模块中,利用exp size代表第1层1×1卷积升级的维度,先对每个通道全局平均池化得到($ 1 \times 1 \times \exp {\text{ size}} $)向量,再经过全连接层、ReLU激活函数得到($ 1 \times 1 \times ( {\exp {\text{ size}}/4} ) $)向量,然后经过全连接层、h-sigmoid激活函数得到($ 1 \times 1 \times \exp {\text{ size}} $)向量,向量内元素取值为$ (0,1) $,将该向量中的每个元素乘以对应权重后,输入到与之相对应通道的特征矩阵中,得到1个与原始特征图大小相等的新特征图。最后通过$ 1 \times 1 $卷积实现降维处理。
3.2 有效通道注意力机制
SE模块中采用的降维操作会对通道注意力的预测效果产生负面影响,低效获取所有通道之间的依赖关系。因此,本文在主干网络的末端添加有效通道注意力机制(Effective Channel Attention Mechanism,ECA)模块[18],加强整体的通道特征,提高模型性能。
ECA模块结构如图7所示。在空间维度上,使用全局平均池化(Global Average Pooling,GAP)对维度为$ H \times W \times C $的特征图A进行特征压缩,得到一个维度为$ 1 \times 1 \times C $的特征图B。通过$ 1 \times 1 $卷积对特征图B进行通道特征学习,并将$ 1 \times 1 \times C $的通道注意力的特征图与$ H \times W \times C $原始输入特征图进行逐通道相乘,输出具有通道注意力的特征图[19]。
卷积操作中的卷积核大小会影响感受野。卷积核大小和通道数C之间存在一种映射关系(式(1)),ECA模块为了避免维度缩减,并有效捕获跨通道交互,通过一维卷积来完成跨通道间的信息交互,该卷积核的大小通过函数$ \psi (C) $自适应变化(式(2)),使通道数较大的层可以更多地进行跨通道交互。
$$ C=2^{\gamma k-\delta} $$ (1) $$ k=\psi(C)=\left|\frac{{\mathrm{log}}_2C}{\gamma}+\frac{\delta}{\gamma}\right|_\mathrm{{odd}} $$ (2) 式中:$ k $为卷积核大小;$ \gamma,\delta $为常数,$ \gamma = 2,\delta = 1 $,用于改变通道数和卷积核之间的比例;$ |\cdot {|_{{\mathrm{odd}}}} $为$ k $只能取奇数。
3.3 Alpha−IoU损失函数
在Head部分,损失函数的选取尤为重要,期望值和真实值越接近,其损失函数值越小。YOLOv7的损失函数主要包含分类损失、物体置信度损失、边界框回归损失,其中分类损失和置信度损失使用交叉熵损失,回归损失使用CIoU[20]。然而,CIoU损失函数反映纵横比的差异,而不是宽高与其置信度的真实差异,阻碍模型有效地优化相似性。因此,本文采用Alpha−IoU代替CIoU作为回归损失函数,Alpha−IoU损失函数可泛化成具有多个惩罚项的IoU损失函数[21]。当权重系数$ \alpha>1 $时,能够提升高置信度目标的损失值和梯度,获得更好的框回归效果,使得网络对异物的预测结果更精准。
$$ {L_{\alpha - {\mathrm{CIoU}}}} = 1 - {Y^\alpha } + \frac{{{\rho ^{2\alpha }}(b,{b^{{\mathrm{gt}}}})}}{{{c^{2\alpha }}}} + {(\beta v)^\alpha } $$ (3) 式中:$ {L_{\alpha - {\mathrm{CIoU}}}} $为Alpha−IoU损失函数;Y为交并比的值;$ \rho^{2\alpha}(b,b\mathrm{^{gt}}) $为预测框和真实框的中心点之间的欧氏距离;$ b $为预测框的中心点;$ b\mathrm{^{gt}} $为真实框的中心点;$ c $为预测框和真实框形成外接矩形的对角线长度;$\, \beta $为trade-off参数;$ v $为度量高宽比的一致性参数。
4. 实验结果与分析
带式输送机异物实时检测实验平台环境:Windows11操作系统,CPU为Inter i5−12400F,GPU为NVIDIA GeForce RTX 3070,Faster−YOLOv7使用Pytorch进行模型搭建。
实验所采用的数据集来自某煤矿井下带式输送机运行时的监控视频数据。经过数据增强后,数据集由2 920张图像组成,将异物标签设置为YW,随机选取2 190张图像作为训练集,730张图像作为测试集。
为了验证本文所提Faster−YOLOv7模型的优势,将其与YOLOv5模型、YOLOv7模型进行对比,模型训练损失函数对比如图8所示,模型检测速度、内存需求、准确率对比见表2。
表 2 检测模型性能Table 2. Detection model performance模型 检测速度/(帧·s−1) 模型内存/MiB 准确率/% YOLOv5 25 43 82.5 YOLOv7 22 71 94.5 Faster−YOLOv7 42 14 91.3 由图8可看出,YOLOv5模型在迭代次数为25时,损失值降为0.09,并最终稳定在0.069左右;YOLOv7模型的初始损失值为0.089,在迭代次数为25时,损失值降为0.053,并最终稳定在0.028左右;Faster−YOLOv7模型的初始损失值为0.143,最终稳定在0.039左右。这说明Faster−YOLOv7模型的训练效果优于YOLOv5模型;由于对YOLOv7主干网络进行轻量化设计、引入ECA机制、使用Alpha−IoU损失函数,导致训练效果略差于YOLOv7模型。
由表2可看出,Faster−YOLOv7模型的检测速度可达42帧/s,较YOLOv5模型、YOLOv7模型分别提升了17,20帧/s;Faster−YOLOv7模型内存为14 MiB,较YOLOv5模型、YOLOv7模型分别降低了29,57 MiB;检测准确率达91.3%,较YOLOv5模型提升了8.8%。这说明Faster−YOLOv7模型更加灵活,检测效率更高,便于部署在嵌入式设备上实现实时检测。
为测试本文改进模型的效果,进行消融实验。首先,使用MobileNetv3轻量化设计YOLOv7主干网络的模型为基础模型;然后,分别测试使用CLAHE进行图像预处理、引入ECA机制、使用Alpha−IoU损失函数的效果;最后,将3种改进策略同时加入基础模型。消融实验结果见表3。
表 3 消融实验结果Table 3. Ablation test results改进策略 准确率/% 检测速度/(帧·s−1) CLAHE ECA Alpha−IoU × × × 83.4 53 √ × × 85.8 49 × √ × 85.9 46 × × √ 85.1 48 √ √ √ 91.3 42 由表3可看出,在该模型中分别单独使用CLAHE进行图像预处理、引入ECA机制、使用Alpha−IoU损失函数后,模型的检测准确率分别提升了2.4%、2.5%和1.7%,检测速度分别降低了4,7,5帧/s;使用CLAHE进行图像预处理、添加ECA模块及Alpha−IoU损失函数的完整改进模型检测准确率达91.3%,检测速度保持在42 帧/s,性能提升明显。
为验证Faster−YOLOv7优势,将Faster−YOLOv7部署到NVIDIA Jetson TX2嵌入式设备上,对煤矿井下带式输送机运煤图像及视频进行检测,并与SSD、YOLOv5、轻量化YOLOv7目标检测算法进行对比,检测结果如图9所示。
由图9可看出,SSD模型在视频检测时发生了漏检现象,YOLO系列模型均有效地识别出待测异物,且Faster−YOLOv7识别结果的置信度更高。从SSD模型、YOLOv5模型、轻量化YOLOv7模型的检测效果来看,均发生了误检现象,而本文在引入ECA机制、使用Alpha−IoU损失函数后,使得异物具有更显著的特征表达,因此模型更关注异物,较好地避免了误检现象的发生。
5. 结论
1) 为了减少井下弱光环境对轻量化神经网络模型推理造成的影响,采用CLAHE算法进行预处理后,检测精度提升了2.4%。
2) 采用MobileNetv3轻量化设计YOLOv7的主干网络、添加ECA机制及引入Alpha−IoU损失函数,显著提升了模型的检测效率。改进后的模型与YOLOv7模型相比,内存需求降低了57 MiB,检测速度提升了20帧/s。
3) 对Faster−YOLOv7算法的异物检测效果进行实验验证,结果表明,在检测精度达91.3%的同时,检测速度达42 帧/s,模型的内存需求仅为14 MiB,满足煤矿井下带式输送机异物实时、精准检测的需求。
4) 将Faster−YOLOv7模型部署在嵌入式设备上,对带式输送机进行异物检测,其识别结果的置信度与SSD模型、YOLOv5模型及轻量化YOLOv7模型相比均有所提高,且有效减少了误检、漏检现象的发生。
-
![]()
图 2 VMD分解下信号中心频率分布
Figure 2. Signal center frequency distribution under VMD decomposition
![]()
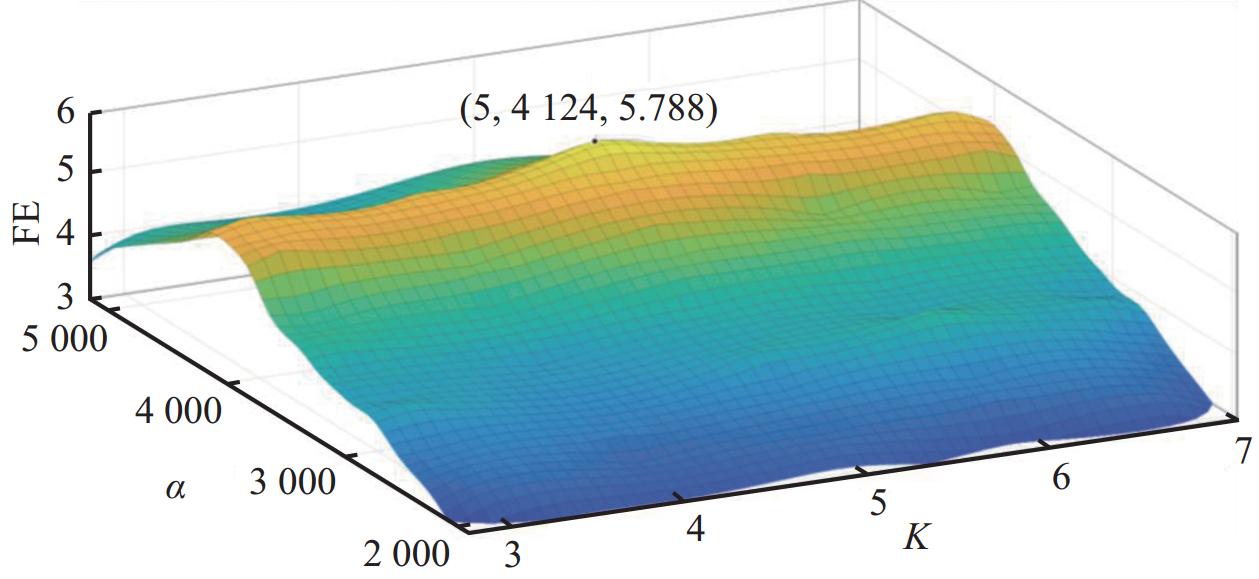
图 5 M侧各参数FE对比
Figure 5. Comparison of fuzzy entropy (FE) of various parameters on M-side
![]()
图 6 N侧各参数FE对比
Figure 6. Comparison of fuzzy entropy (FE) of various parameters on N-side
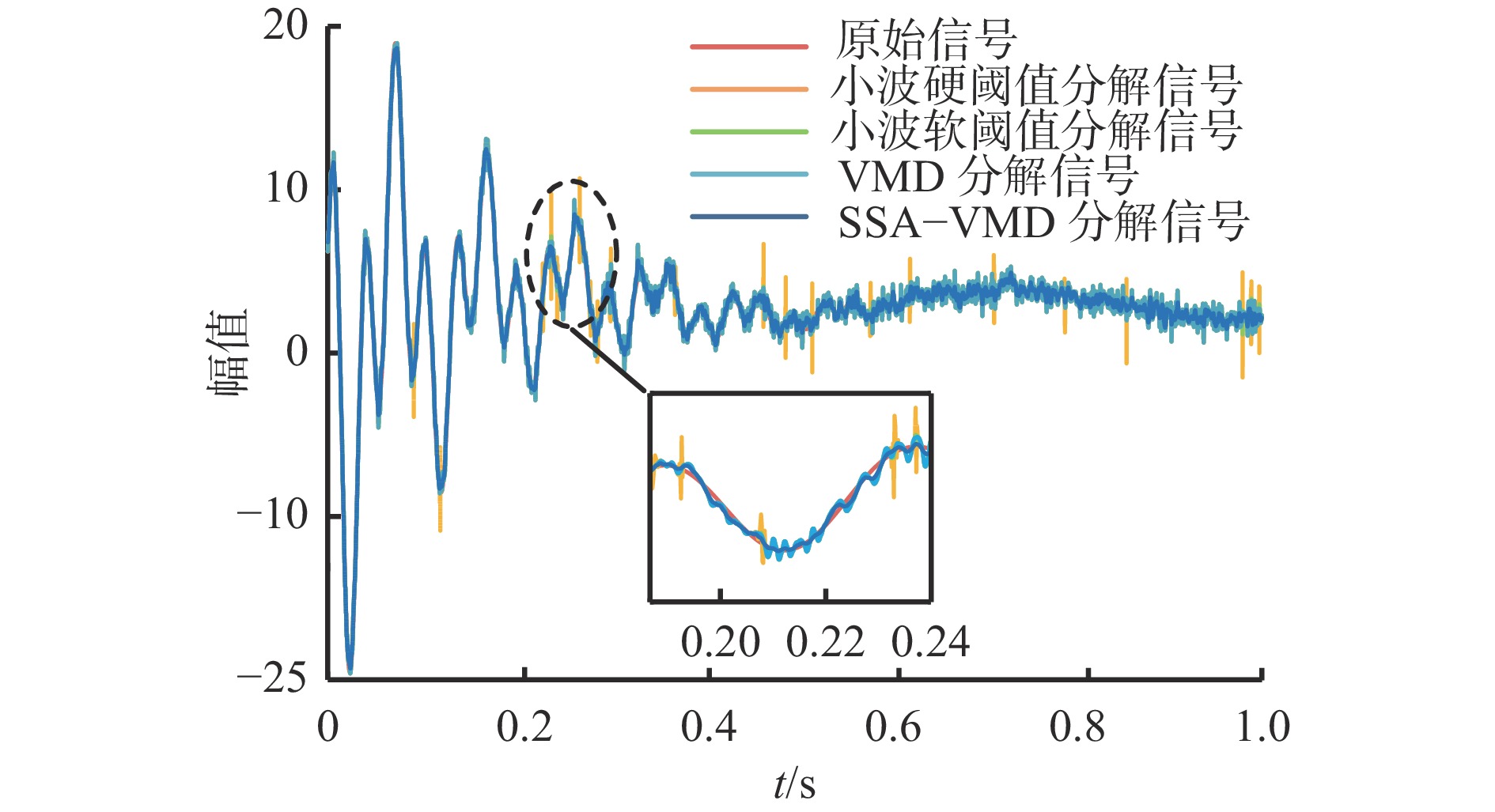
表 1 不同算法的信号分解结果
Table 1 Filtering results of different algorithms
算法 SNR/dB PCC 9 dB噪声 12 dB噪声 9 dB噪声 12 dB噪声 小波硬阈值 9.82 12.77 0.973 0.965 小波软阈值 9.43 12.76 0.986 0.976 VMD 9.33 12.76 0.990 0.989 SSA−VMD 9.15 12.19 0.996 0.998  下载: 导出CSV
下载: 导出CSV
表 2 不同过渡电阻下故障定位结果
Table 2 Fault positioning results under different transition resistance
过渡电阻/Ω 波头采样点 定位位置/m 定位误差/m M侧 N侧 0.1 5 032 5 022 599.13 0.87 10 5 032 5 022 599.13 0.87 1 000 5 032 5 022 599.13 0.87
下载: 导出CSV
表 3 不同故障相角下故障定位结果
Table 3 Fault positioning results under different fault phase angles
故障相角/(°) 波头采样点 定位位置/m 定位误差/m M侧 N侧 0 5 033 5 023 599.13 0.87 30 5 032 5 022 599.13 0.87 60 5 029 5 019 599.13 0.87 90 5 030 5 020 599.13 0.87
下载: 导出CSV
表 4 不同故障距离下故障定位结果
Table 4 Fault positioning results under different fault distances
故障距离/m 波头采样点 定位位置/m 定位误差/m M侧 N侧 100 5 011 5 051 103.57 3.57 200 5 098 5 128 202.61 2.61 300 5 042 5 062 301.74 1.74 400 5 061 5 071 400.87 0.87 500 5 059 5 059 500.00 0 600 5 032 5 022 599.13 0.87 700 5 067 5 047 698.26 1.74 800 5 143 5 113 797.39 2.61 900 5 125 5 185 896.43 3.57
下载: 导出CSV
表 5 不同方法的故障定位结果
Table 5 Fault positioning results of different methods
故障位置/m 方法 定位位置/m 定位误差/m 400 小波模极大值 419.96 19.96 VMD+NTEO 409.04 9.04 SSA−VMD−NTEO 400.87 0.87 800 小波模极大值 837.04 37.04 VMD+NTEO 817.21 17.21 SSA−VMD−NTEO 797.39 2.61
下载: 导出CSV
-
[1] 赵利. 融合小电流接地的矿山电网接地选线设计[J]. 煤炭工程,2019,51(9):48-51. ZHAO Li. Fault line selection of coalmine distribution network integrated small current neutral grounding system[J]. Coal Engineering,2019,51(9):48-51.
[2] 周鲁天. 基于LSTM的矿山电网行波波头辨识[D]. 徐州:中国矿业大学,2020. ZHOU Lutian. Traveling wave front identification in mine power grid based on LSTM[D]. Xuzhou: China University of Mining and technology, 2020.
[3] 罗超,耿蒲龙,曲兵妮,等. 基于小波包的矿井供电系统单相接地故障选线方法[J]. 工矿自动化,2018,44(2):68-74. LUO Chao,GENG Pulong,QU Bingni,et al. A line selection method for single phase ground fault in coal mine power supply system based on wavelet packet[J]. Industry and Mine Automation,2018,44(2):68-74.
[4] 王国法,赵国瑞,任怀伟. 智慧煤矿与智能化开采关键核心技术分析[J]. 煤炭学报,2019,44(1):34-41. WANG Guofa,ZHAO Guorui,REN Huaiwei. Analysis on key technologies of intelligent coal mine and intelligent mining[J]. Journal of China Coal Society,2019,44(1):34-41.
[5] 王升花. 煤矿供电系统电能质量综合评价[J]. 工矿自动化,2017,43(2):86-89. WANG Shenghua. Comprehensive evaluation of power quality of coal mine power supply system[J]. Industry and Mine Automation,2017,43(2):86-89.
[6] 王国法,李世军,张金虎,等. 筑牢煤炭产业安全奠定能源安全基石[J]. 中国煤炭,2022,48(7):1-9. WANG Guofa,LI Shijun,ZHANG Jinhu,et al. Ensuring the safety of coal industry to lay the cornerstone of energy security[J]. China Coal,2022,48(7):1-9.
[7] 王炜,王全金,尹力,等. 基于零模行波波速量化的高压输电线路双端故障定位方法[J]. 电力自动化设备,2022,42(12):165-170. WANG Wei,WANG Quanjin,YIN Li,et al. Two-terminal fault location method for high-voltage transmission line based on zero-mode traveling wave velocity quantization[J]. Electric Power Automation Equipment,2022,42(12):165-170.
[8] 周鲁天,梁睿,彭楠,等. 基于ARIMA的矿山电网故障暂态行波波头辨识及故障测距[J]. 电力自动化设备,2020,40(6):177-188. ZHOU Lutian,LIANG Rui,PENG Nan,et al. Transient traveling wave front identification and fault location in mine power grid based on ARIMA[J]. Electric Power Automation Equipment,2020,40(6):177-188.
[9] 郭秀才,刘冰冰,王力立. 基于小波包和CS−BP神经网络的矿用电力电缆故障诊断[J]. 计算机应用与软件,2021,38(9):105-110. GUO Xiucai,LIU Bingbing,WANG Lili. Fault diagnosis of mining power cable based on wavelet packet an CS-BP neural network[J]. Computer Applications and Software,2021,38(9):105-110.
[10] 赵建文,孟旭辉. 数字孪生在煤矿电网中的应用研究[J]. 工矿自动化,2023,49(2):38-46. ZHAO Jianwen,MENG Xuhui. Research on the application of digital twin in coal mine power grid[J]. Journal of Mine Automation,2023,49(2):38-46.
[11] 詹惠瑜,刘科研,盛万兴,等. 有源配电网故障诊断与定位方法综述及展望[J]. 高电压技术,2023,49(2):660-671. ZHAN Huiyu,LIU Keyan,SHENG Wanxing,et al. Review and prospects of fault diagnosis and location method in active distribution network[J]. High Voltage Engineering,2023,49(2):660-671.
[12] 徐岩,胡紫琪,董浩然. 等. 基于灰色综合关联度的柔性直流配电网故障定位[J]. 太阳能学报,2023,44(4):324-331. XU Yan,HU Ziqi,DONG Haoran,et al. Fault location based on comprehensive grey relational degree for flexible DC distribution network[J]. Acta Energiae Solaris Sinica,2023,44(4):324-331.
[13] 赵敏,尚鹏辉. 井下配电网电缆故障在线双端行波测距方法[J]. 工矿自动化,2016,42(11):50-55. ZHAO Min,SHANG Penghui. Online cable fault ranging method by double-end traveling wave for underground distribution network[J]. Industry and Mine Automation,2016,42(11):50-55.
[14] 毕胜,耿蒲龙,张建花,等. 基于CEEMD与自相关阈值去噪的单相接地故障选线方法研究[J]. 煤炭工程,2022,54(7):153-158. BI Sheng,GENG Pulong,ZHANG Jianhua,et al. Line selection method for single phase ground fault based on CEEMD and autocorrelation threshold denoising[J]. Coal Engineering,2022,54(7):153-158.
[15] 吴赛. 基于VMD−GST−TEO的煤矿井下输电线路故障定位[D]. 阜新:辽宁工程技术大学,2020. WU Sai. Fault location of underground transmission line based on VMD-GST-TEO in coal mine [D]. Fuxin:Liaoning Technical University,2020.
[16] 杜政奇,王敬华,张新慧. 基于参数优化VMD和能量相似度的配电网故障区段定位方法[J]. 电子测量技术,2022,45(8):95-101. DU Zhengqi,WANG Jinghua,ZHANG Xinhui. Fault section location in distribution network based on parameter optimization VMD and energy similarity[J]. Electronic Measurement Technology,2022,45(8):95-101.
[17] 荣相. 矿用变频器性能测试系统设计[J]. 工矿自动化,2021,47(5):9-15. RONG Xiang. Design of mine inverter performance test system[J]. Idustry and Mine Automation,2021,47(5):9-15.
[18] 张伟,李军霞,陈维望. 基于蝙蝠算法优化VMD参数的滚动轴承复合故障分离方法[J]. 振动与冲击,2022,41(20):133-141. ZHANG Wei,LI Junxia,CHEN Weiwang. A compound fault feature separation method of rolling bearings based on VMD optimized by the bat algorithm[J]. Journal of Vibration and Shock,2022,41(20):133-141.
[19] 罗亦泳,姚宜斌,黄城,等. 基于改进VMD的变形特征提取与分析[J]. 武汉大学学报(信息科学版),2020,45(4):612-619. LUO Yiyong,YAO Yibin,HUANG Cheng,et al. Deformation feature extraction and analysis based on improved VMD[J]. Geomatics and Information Science of Wuhan University,2020,45(4):612-619.
[20] 任学平,李攀,王朝阁,等. 基于改进VMD与包络导数能量算子的滚动轴承早期故障诊断[J]. 振动与冲击,2018,37(15):6-13. REN Xueping,LI Pan,WANG Chaoge,et al. Rolling bearing early fault diagnosis based on improved VMD and envelope derivative operator[J]. Journal of Vibration and Shock,2018,37(15):6-13.
[21] 李一鸣. 基于小波包多尺度模糊熵和加权KL散度的煤岩智能识别[J]. 工矿自动化,2023,49(4):92-98. LI Yiming. Intelligent recognition of coal and rock based on wavelet packet multi-scale fuzzy entropy and weighted KL divergence[J]. Journal of Mine Automation,2023,49(4):92-98.
[22] SEYEDALI M,AMIR H G,SEYEDEH Z M,et al. Salp swarm algorithm:A bio-inspired optimizer for engineering design problems[J]. Advances in Engineering Software,2017,114(6):163-191.
[23] 吴传龙,陈伟,刘晓文,等. 基于特征融合的提升机逆变器故障诊断[J]. 工矿自动化,2021,47(5):46-51. WU Chuanlong,CHEN Wei,LIU Xiaowen,et al. Feature fusion based fault diagnosis of hoist inverter[J]. Industry and Mine Automation,2021,47(5):46-51.
[24] 范新桥,朱永利,卢伟甫. 基于EMD−TEO的输电线路行波故障定位[J]. 电力系统保护与控制,2012,40(9):8-12,17. FAN Xinqiao,ZHU Yongli,LU Weifu. Traveling wave based fault location for transmission lines based on EMD-TEO[J]. Power System Protection and Control,2012,40(9):8-12,17.
[25] 骆玮,王恒,王磊,等. 基于设备信息交互的小电流接地故障定位[J]. 电力系统保护与控制,2019,47(4):73-82. LUO Wei,WANG Heng,WANG Lei,et al. Faulted line location method for distribution systems based on the equipment's information exchange[J]. Power System Protection and Control,2019,47(4):73-82.
[26] 郭威, 史运涛. 基于空间域图像生成和混合卷积神经网络的配电网故障选线方法[J/OL]. 电网技术: 1-14.[2023-08-04]. http://kns.cnki.net/kcms/detail/11.2410.tm.20230310.1705.003.html. GUO Wei, SHI Yuntao. Fault line selection for distribution network based on spatial domain image generation and hybrid convolutional neural network[J/OL]. Power System Technology: 1-14[2023-08-04]. http://kns.cnki.net/kcms/detail/11.2410.tm.20230310.1705.003.html.
-
期刊类型引用(4)
1. 张赟. 基于UWB技术的煤矿井下人-车防碰撞安全预警方法研究. 陕西煤炭. 2025(03): 169-173 .  百度学术
百度学术
2. 肖明国,张彪,康玉国,丁文,黄渊,郑学召. 面向钻孔救援的UWB雷达探测技术研究进展. 煤炭技术. 2024(06): 174-177 . 百度学术
3. 戴剑波. 基于UWB精确定位智能搜救仪设计. 自动化与仪器仪表. 2024(08): 298-301+306 . 百度学术
4. 王耀. 基于5G工业互联网的井工煤矿信息化技术研究. 工矿自动化. 2023(S1): 29-31 . 本站查看
其他类型引用(5)














计量
- 文章访问数: 140
- HTML全文浏览量: 23
- PDF下载量: 21
- 被引次数: 9
