
High-precision 3D point cloud modeling method for coal mine roadways based on known point constraints
-
摘要:
面对煤矿井下低照度、弱纹理、高粉尘等复杂条件,现有煤矿巷道三维建模方法存在成本高、时效性差和精度低等问题,提出了一种基于已知点约束的高精度煤矿巷道三维点云建模方法。首先,通过体素滤波器对激光雷达点云数据进行降采样,并对降采样后的激光雷达点云数据利用迭代最近点(ICP)匹配提取出局部点云地图,结合惯性测量单元(IMU)数据对点云数据进行畸变校正;其次,利用ICP配准局部点云地图和畸变校正后的点云地图,以提高前端配准的精度和效率,并在后端加入回环检测来提高煤矿巷道定位与建图精度;然后,通过附合导线控制测量获取煤矿巷道分段已知点坐标,为点云建模提供全局约束条件;最后,将已知点和激光雷达同时定位与建图(SLAM)确定的测站点进行联合平差计算,对测站点坐标进行校正,并进一步利用非线性优化方法校正全局点云地图坐标,从而提高三维点云建模精度。实验结果表明:该方法构建的煤矿巷道三维点云地图具有较好的全局一致性和几何结构真实性,在煤矿井下具有较高的定位与建图精度。
Abstract:In response to the complex conditions such as poor lighting, weak texture, and high concentrtaions of dust in underground coal mines, the existing 3D modeling methods for coal mine roadways have the disadvantages of high costs, poor timeliness, and low accuracy. A high-precision 3D point cloud modeling method for coal mine roadways based on known point constraints was proposed. The LiDAR point cloud data was downsampled by voxel filter, followed by the use of iterative closest point (ICP) matching for the downsampled LiDAR point cloud data to extract local point cloud maps. The point cloud data was then distortion-corrected using inertial measurement unit (IMU) data. ICP was utilized to align the local point cloud maps with the distortion-corrected point cloud maps, improving the accuracy and efficiency of front-end registration. Loopback detection was incorporated in the back-end to enhance the accuracy of coal mine roadway localization and mapping. The coordinates of the known points of the coal mine roadways were obtained through control measurements using connecting traverse, providing global constraints for point cloud modeling. A combined adjustment calculation was performed on the known points and the station points determined by LiDAR simultaneous localization and mapping (SLAM). The station point coordinates were corrected, and a nonlinear optimization method was further employed to adjust the global point cloud map coordinates, thereby improving the accuracy of 3D point cloud modeling. Experimental results demonstrated that the 3D point cloud map of coal mine roadways constructed by this method had high global consistency and geometric structure authenticity, achieving high localization and mapping accuracy in underground coal mines.
-
0. 引言
煤矿智能化是我国煤炭企业高质量发展的核心技术支撑[1-2],而高精度的时空数据是煤矿智能化的基础。煤矿巷道作为采运装备的重要载体,是矿井实景三维的重要组成部分,也是智慧矿山的空间信息基础,煤矿巷道三维建模对于科学合理地组织各类矿山信息,将海量异质的矿山信息资源进行全面、高效和有序地管理与整合起着重要作用,可为煤矿智能化开采提供精准的三维空间数据支撑[3-4]。
煤矿巷道参数化建模方法主要有以下3种[5]:借助巷道顶底板中心线数据与断面数据完成巷道建模;借助巷道中心线及顶底板边界线完成巷道建模;利用巷道中心线及边界线来提取高程以完成巷道建模。这3种方法主要依靠断面特征点、导线点、巷道中心线等数据进行建模,受到特征数据精度影响导致建模精度较低,且不能准确描述巷道边界[6]。随着传感器技术的快速发展,三维激光雷达扫描技术凭借其测量速度快、范围广、精度高等优势,为煤矿巷道高精度三维点云建模开辟了新途径。尤其是激光雷达同时定位与地图构建(Simultaneous Localization and Mapping,SLAM)技术的快速发展与广泛应用极大地提高了煤矿巷道三维建模的效率[7-10]。H. Kim等[11]利用编码器和多个激光雷达传感器在水平方向上连续检测巷道壁形状并执行模式匹配,同时叠加垂直方向上的扫描结果,实现了高精度巷道建模。刘敬娜等[12]提出了一种分体分面组合模型自动建模技术,为煤矿巷道建模提供了一种新的技术思路。Wang Jiaheng等[13]提出了基于体素网格的点云处理与改进的点面匹配方法,并结合地面点云约束的滑动窗口优化,得到了较好的建模结果。刘少杰等[14]提出了一种点云数据与三维栅格映射的掘进巷道空间建模方法,极大地减少了数据处理量。江记洲等[15]将矿山巷道的三维点云数据通过圆柱面投影转换为二维离散点,应用分治算法进行三角剖分,并保存二三维点云与三角网之间的拓扑关系,从而完成三维巷道模型重建。M. J. M. Gurgel等[16]针对地下不利环境条件使建模技术变得复杂的问题,提出了适用于恶劣条件下的对齐与配准算法,以获得精确的三维模型。
然而,面对煤矿井下低照度、弱纹理、高粉尘等复杂条件,现有煤矿巷道三维建模方法存在成本高、时效性差和精度低等问题。因此,本文提出一种已知点约束的高精度煤矿巷道三维点云建模方法。该方法通过多重优化的前端匹配,将已知点约束信息加入到复杂煤矿巷道激光SLAM建模中,以校正测站点和全局点云地图坐标,从而提高煤矿巷道三维点云建模精度。
1. 方法原理
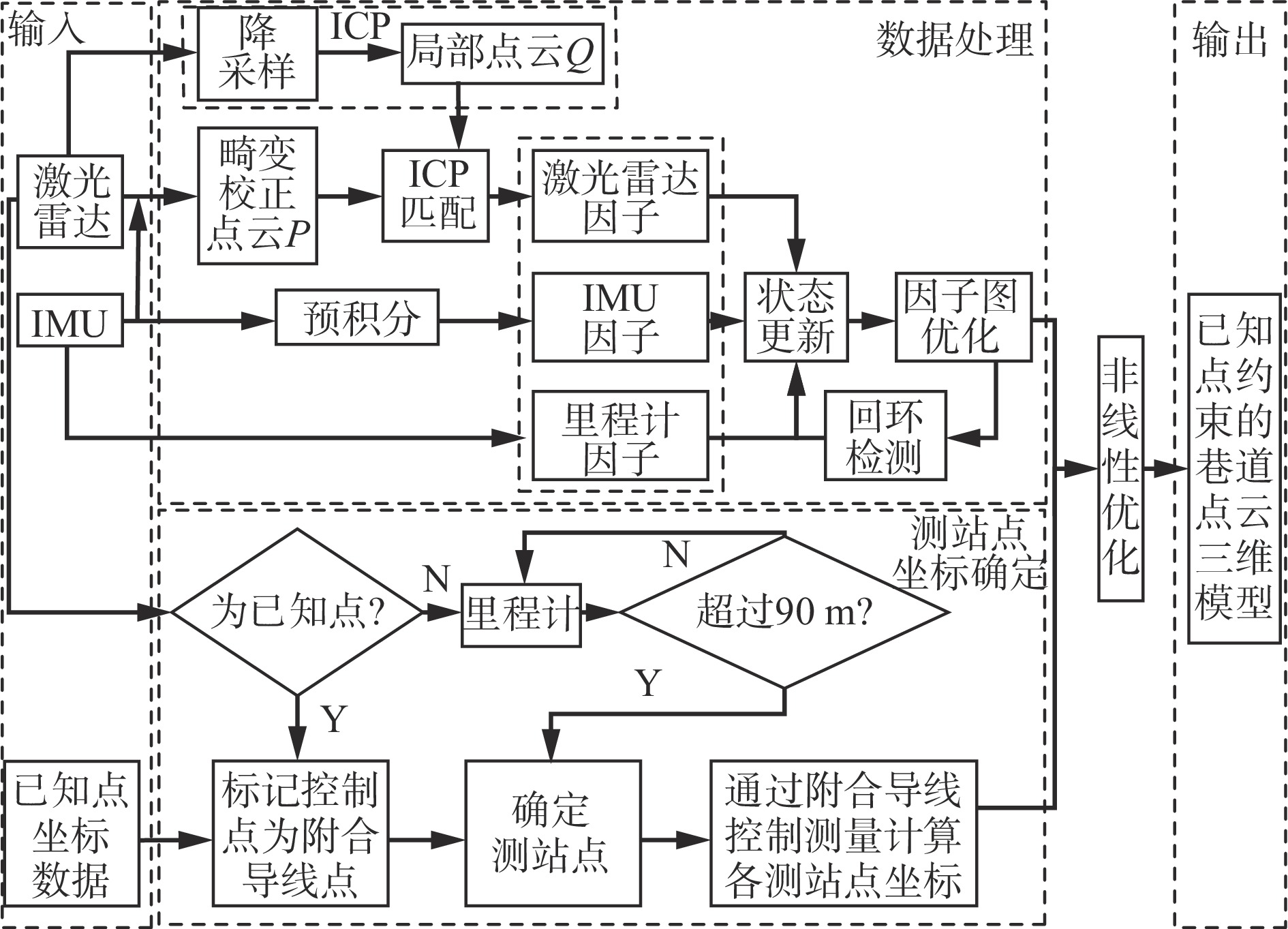
已知点约束的高精度煤矿巷道三维点云建模流程如图1所示。首先,采集激光雷达点云数据(采集频率10 Hz)、惯性测量单元(Inertial Measurement Unit,IMU)数据(采集频率200 Hz)和已知点坐标数据。其次,对激光雷达点云数据与IMU数据进行处理:对于激光雷达点云数据,利用IMU预测的位姿对激光雷达运动过程中可能导致的点云畸变进行去除,再通过多重优化对去畸变的激光雷达点云数据进行初步优化,以提高前端配准的精度和效率;对于IMU数据,通过构建新的预积分观测值用于后端优化。然后,激光SLAM里程计判断是否添加测站点,并通过附合导线控制测量计算各测站点坐标。最后,将测站点坐标作为约束,利用非线性优化方法校正三维激光点云地图,获得已知点约束的巷道点云三维模型。
![]() 图 1 已知点约束的高精度煤矿巷道三维点云建模流程Figure 1. Workflow of high-precision 3D point cloud modeling for coal mine roadways based on known point constraints
图 1 已知点约束的高精度煤矿巷道三维点云建模流程Figure 1. Workflow of high-precision 3D point cloud modeling for coal mine roadways based on known point constraints1.1 数据处理
采用体素滤波器对激光雷达点云数据进行降采样,再针对降采样数据进行多重优化。第1重优化:结合IMU提供的加速度和角速度信息对激光雷达运动畸变进行校正,生成畸变校正点云P,同时对IMU数据进行预积分,形成用于后端优化的IMU因子,为后续的位姿估计提供运动约束。第2重优化:使用迭代最近点(Iterative Closest Point,ICP)[17]对降采样的激光雷达点云数据进行配准,形成局部点云Q,再将畸变校正点云P与局部点云Q进行ICP配准,形成激光雷达因子,通过2次加入ICP配准,加强了对环境点云的约束。第3重优化:结合激光雷达点云数据和IMU数据,计算当前帧与前一帧之间的运动变化,生成里程计因子。将激光雷达因子、IMU因子和里程计因子融入到因子图中实现状态更新,在后端采用Scan Context技术[18]加入回环检测以纠正累计漂移。
1.2 测站点坐标确定
为确定测站点间的距离,通过大量实验对多种巷道结构和场景中不同测站点间距下的SLAM定位精度进行评估,发现当测站点间距控制在90 m以内时,SLAM定位误差能够保持在一个相对较低且可接受的范围内,生成的点云地图具有较高的精度。因此,每隔一定时间计算激光雷达所在位置与初始位置的大致距离,若达到90 m,则在此位置附近生成的地图点上确定1个测站点,这样每隔90 m寻找1个测站点作为约束,直至扫描结束。
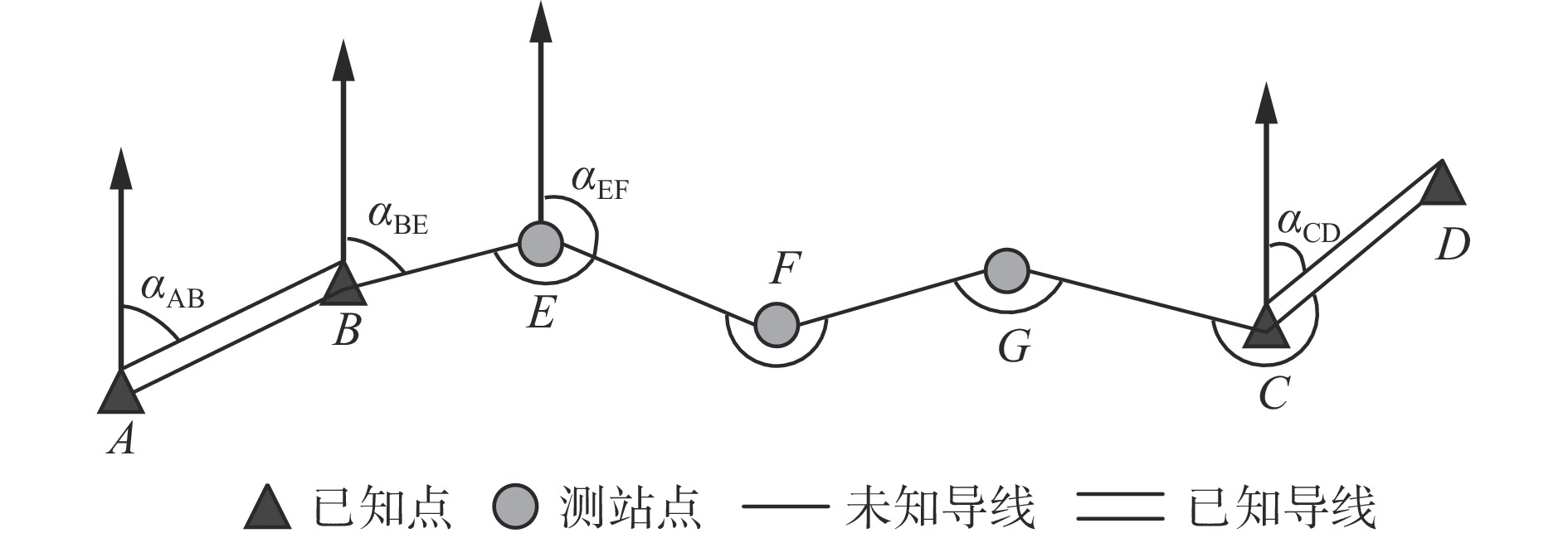
附合导线控制测量始于一个已知点或已知边,向外延伸经过若干未知点,最终到达另一个已知点或已知边,通过平差计算可以得到未知点的平面坐标[19]。附合导线控制测量原理如图2所示。已知点$ A $、点$ B $、点$ C $、点$ D $的坐标,假设点$ A $、点$ B $与点$ C $、点$ D $中间有3个测站点,若测量方向为从点$ A $、点$ B $出发向点$ C $、点$ D $方向前进,则测得的前后测站点夹角为前进方向的右侧角度。通过已知点的坐标方位角和测得的右侧角度,可递推计算出测站点的坐标方位角。
以观测边EF为例,其坐标方位角为
$$ {\alpha }_{EF}=\left\{ \begin{array}{ll}{\alpha }_{BE}-{\text{∠}} BEF-180^{\circ} & {\alpha }_{EF}\geqslant 0\\ {\alpha }_{BE}-{\text{∠}} BEF+180^{\circ} & {\alpha }_{EF} < 0\end{array}\right. $$ (1) 式中$ {\alpha }_{BE} $为观测边BE的坐标方位角。
同理,可计算出各个观测边的坐标方位角。由于点$ C $和点$ D $为已知点,可得附合导线坐标方位角的角度闭合差:
$$ f={\alpha'}_{CD}-{\alpha }_{CD} $$ (2) 式中:$ {\alpha'}_{CD} $为根据附合导线控制测量计算的已知边$ CD $的坐标方位角;$ {\alpha }_{CD} $为根据点C和点D坐标计算得出的已知边CD的坐标方位角。
利用改正后的坐标方位角$ \alpha $和观测边长度$ d $计算每个测站点在x轴方向的坐标增量$ \mathrm{\Delta }x $、在y轴方向的坐标增量$ \mathrm{\Delta }y $:
$$ \left\{ \begin{array}{l}\Delta x=d\;\cos\;\alpha \\ \Delta y=d\;\sin\;\alpha \end{array}\right. $$ (3) 利用各测站点的坐标增量之和与点B到点$ C $的坐标之差,计算附合导线在x轴方向的坐标增量闭合差$ {F}_{x} $、在y轴方向的坐标增量闭合差$ {F}_{y} $:
$$ \left\{ \begin{array}{l}{F}_{x}{=\Delta x}_{CD}-\sum \Delta x\\ {{F}_{y}=\Delta y}_{CD}-\sum \Delta y\end{array}\right. $$ (4) 式中$ {\Delta x}_{CD} $,$ {\Delta y}_{CD} $分别为点$ C $到点$ D $在x轴、y轴方向的坐标增量。
将坐标增量闭合差按距离平均分配给各测站点,即可获得改正后的各测站点坐标。
1.3 非线性优化
对已知点及巷道确定的测站点进行平差计算,利用非线性优化方法对测站点的坐标进行校正。
$$ \begin{aligned} X^*& =\operatorname{argmin}\left(- \operatorname{ln}\left(p(X) \prod_{k=1}^m p\left({\textit{z}}_k \mid X_k\right)\right)\right) \\ & =\operatorname{argmin}\left(\sum_{k=0}^m\left\|h_k\left(X_k\right)-{\textit{z}}_k\right\|_{{\boldsymbol{\varOmega}}_k}^2\right) \end{aligned} $$ (5) 式中:$ {X}^{*} $为优化后坐标;$ X $为待求的未知坐标;$ p\left(X\right) $为$ X $的先验概率,$ p\left(X\right) $包括关于$ X $的任何先验知识,在没有先验知识的情况下,$ p\left(X\right) $变成一个常数,可以从优化中删除;m为坐标点数量;$ {{\textit{z}}}_{k} $为坐标点k处校正前的地图点坐标;$ {X}_{k} $为坐标点k处的未知坐标;$ p\left({{\textit{z}}}_{k}|{X}_{k}\right) $为给定$ {X}_{k} $时$ {{\textit{z}}}_{k} $的条件概率,即变量$ X $的概率约束;$ {h}_{k}\left({X}_{k}\right) $为$ {X}_{k} $的非线性函数,用于将$ {X}_{k} $映射到校正后的空间;$ {\boldsymbol{\varOmega }}_{k} $为信息矩阵,即协方差矩阵的逆,表示观测数据的精度或不确定性。
非线性优化算法伪代码如下,其中$ {\Delta X}_{k} $为坐标点k处步长,$ {r}_{k} $为误差函数,$ {{\boldsymbol{J}}}_{k} $为$ {r}_{k} $对$ {X}_{k} $的偏导数矩阵。
Algorithm1. 三维点云校正的非线性优化
Input:未知坐标$ X $,校正前的地图点坐标$ {{\textit{z}}}_{k} $,信息矩阵$ {\boldsymbol{\varOmega }}_{k} $
Output:优化后的坐标$ {X}^{*} $
1: $ X $←初始化点云
2: 设置最大迭代次数和阈值
3: for iteration=1 to max _iterations do
4: for k = 1 to m do
5: $ {{r}_{k}\leftarrow h}_{k}\left({X}_{k}\right)-{{\textit{z}}}_{k} $
6: $ {{\boldsymbol{J}}}_{k}\leftarrow $计算$ {r}_{k} $对$ {X}_{k} $的偏导数
7: end for
8: $ {\Delta X}_{k}\leftarrow {-\left({{\boldsymbol{J}}_{\boldsymbol{k}}}^{\mathrm{T}}{{\boldsymbol{\varOmega}} }_{k}{\boldsymbol{J}}_{\boldsymbol{k}}\right)}^{-1}{{\boldsymbol{J}}_{\boldsymbol{k}}}^{\mathrm{T}}{\boldsymbol{\varOmega }}_{k}{r}_{k} $
9: $ {X}_{k}\leftarrow {X}_{k}+{\Delta X}_{k} $
10: if ||$ {\Delta X}_{k} $||<阈值 then break
11: return $ {X}^{*} $
2. 实验与分析
2.1 实验场景
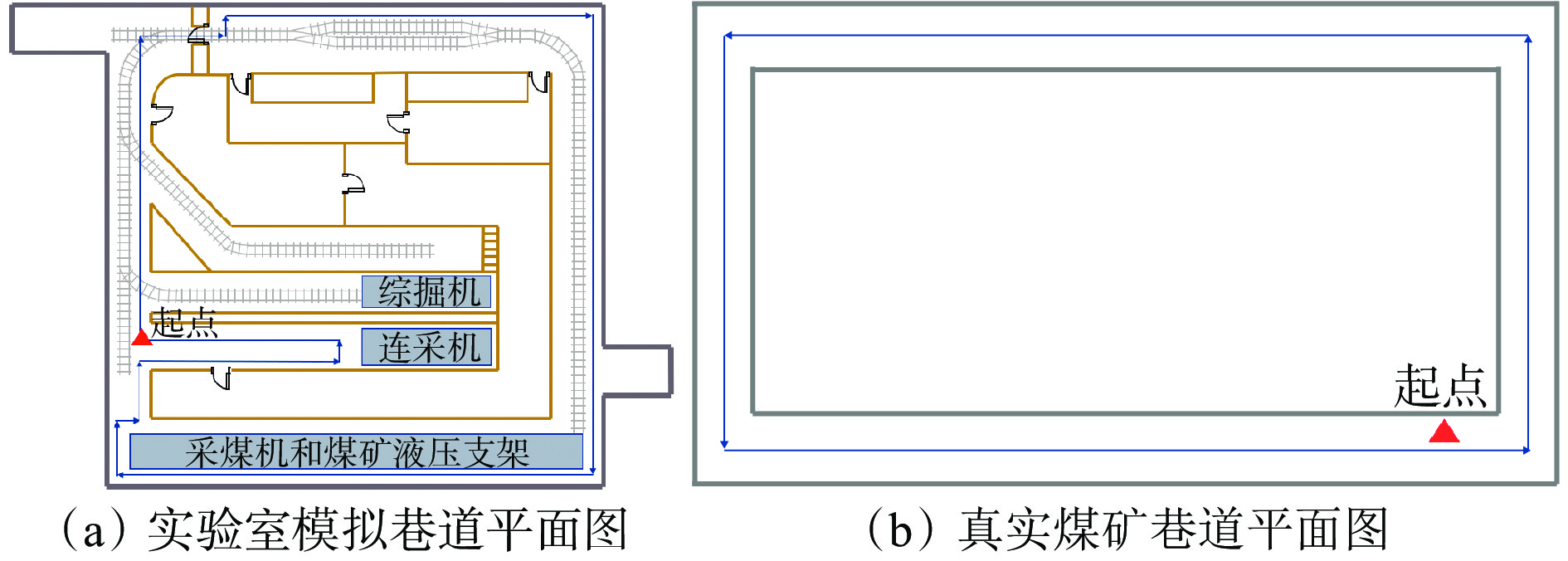
采用GO−SLAM手持式三维激光扫描仪在煤矿井下进行实验数据采集。扫描仪参数:扫描距离为120 m;扫描范围为360°×285°;扫描速度为65万点/s;激光线数为32。实验场景为实验室模拟巷道和真实煤矿巷道,如图3所示(图中红色三角形位置为数据采集的起点,蓝色路线表示数据采集路径),数据采集路径长度分别为286,1 352 m。
2.2 定性分析
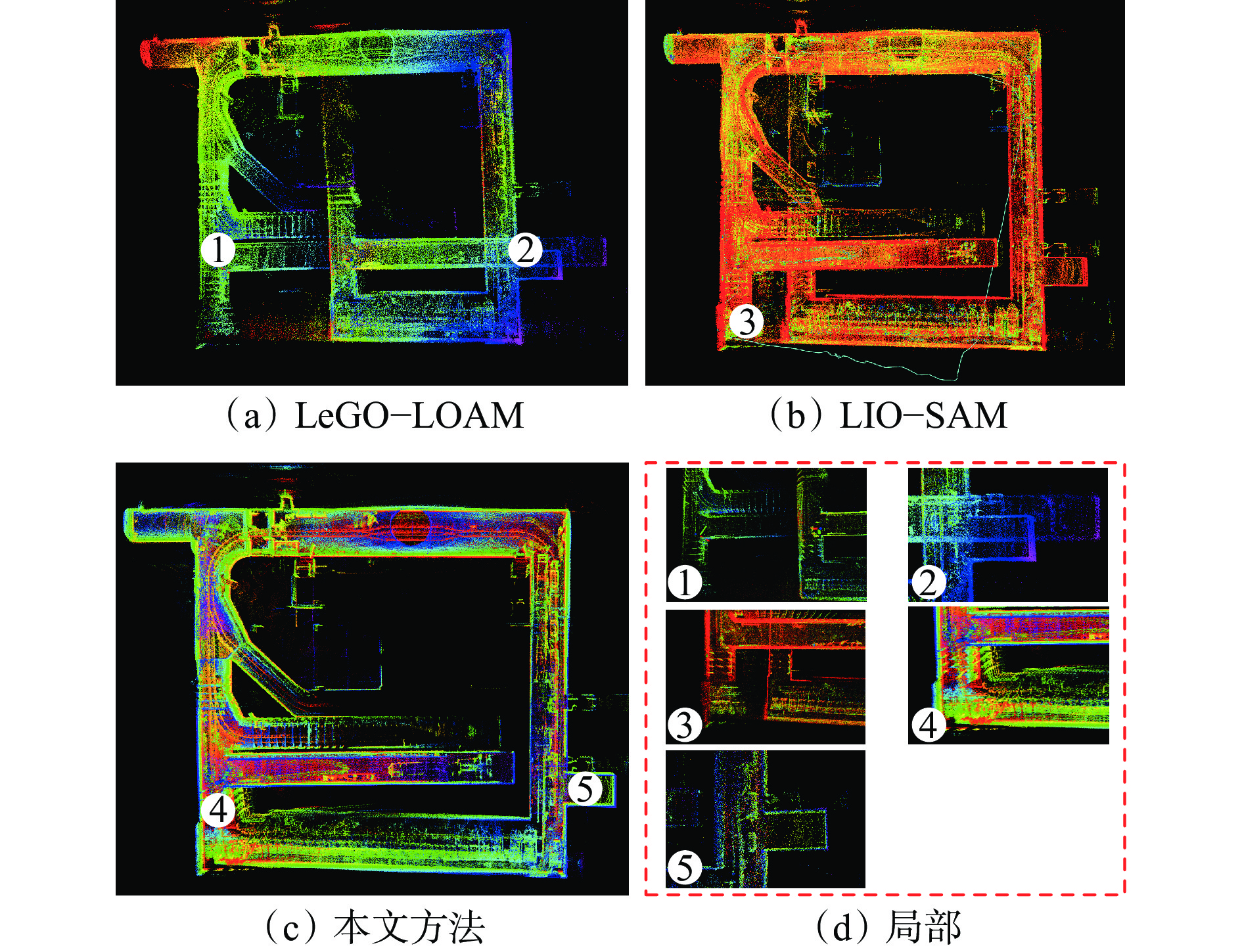
将本文方法与主流方法LeGO−LOAM[20]、LIO−SAM[21]在实验室模拟巷道中的建图结果进行对比,如图4所示。可看出LeGO−LOAM方法由于在地图构建过程中约束不足,导致实验室模拟巷道建图的起点与终点位置偏差较大,即使有回环检测约束仍不能实现精准建图;LIO−SAM方法建图效果较好,建图起点与终点位置偏差较小,但竖直方向的偏差较大;本文方法建图的完整性和一致性更好,精度较LeGO−LOAM与LIO−SAM有较明显的提高。
![]() 图 4 不同方法在实验室模拟巷道中的建图结果Figure 4. Mapping results of different methods in laboratory simulated roadways
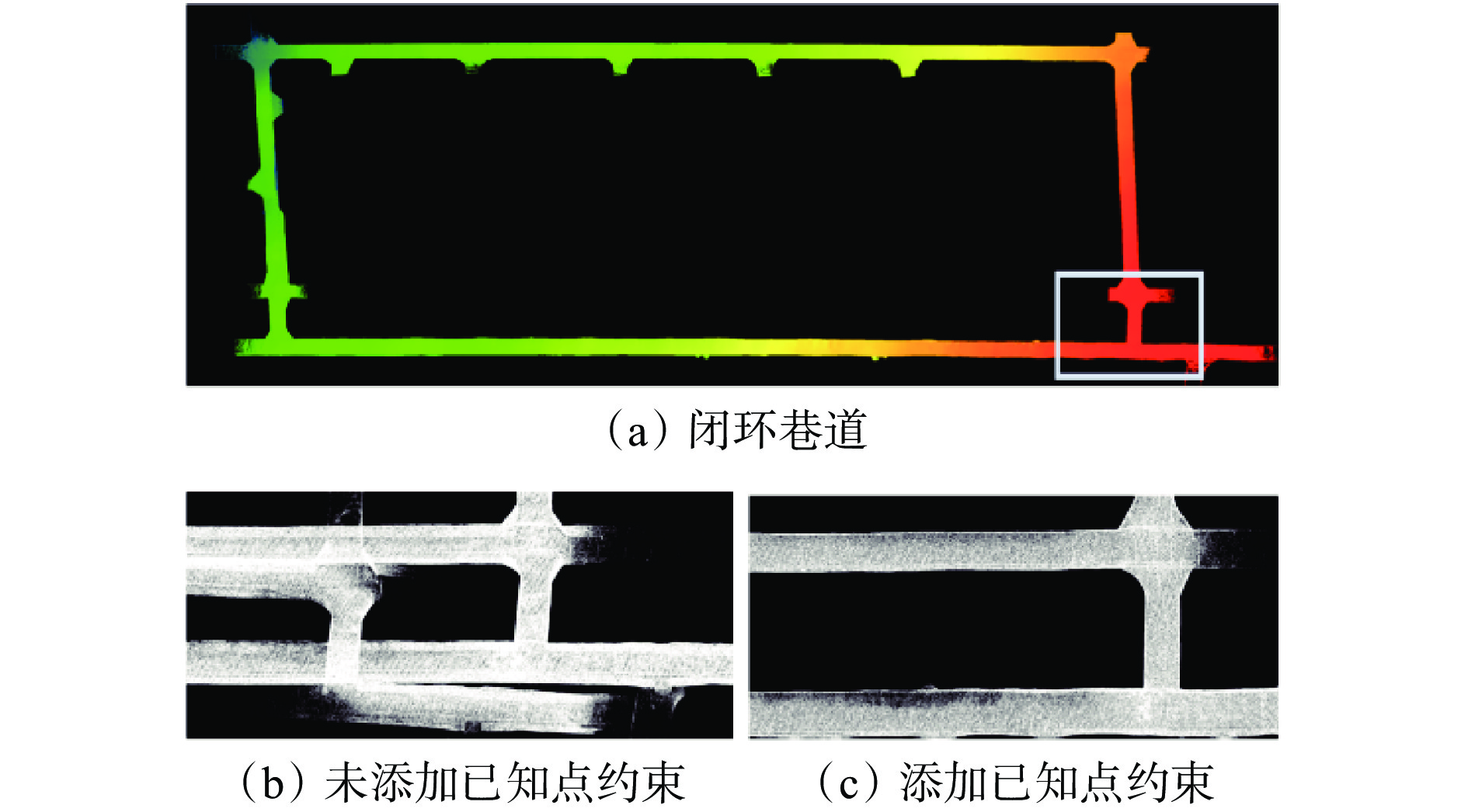
图 4 不同方法在实验室模拟巷道中的建图结果Figure 4. Mapping results of different methods in laboratory simulated roadways为进一步验证本文方法的有效性,在真实煤矿巷道对添加已知点约束前后的建图结果进行对比,如图5所示。可看出在未添加已知点约束的情况下,煤矿巷道点云地图出现较大偏差;而添加已知点约束的煤矿巷道点云地图具有较好的全局一致性,有效降低了点云地图的偏差。
![]() 图 5 添加已知点约束前后的煤矿巷道建图结果Figure 5. Mapping results of coal mine roadways before and after incorporating known point constraints
图 5 添加已知点约束前后的煤矿巷道建图结果Figure 5. Mapping results of coal mine roadways before and after incorporating known point constraints2.3 定量分析
2.3.1 定位精度
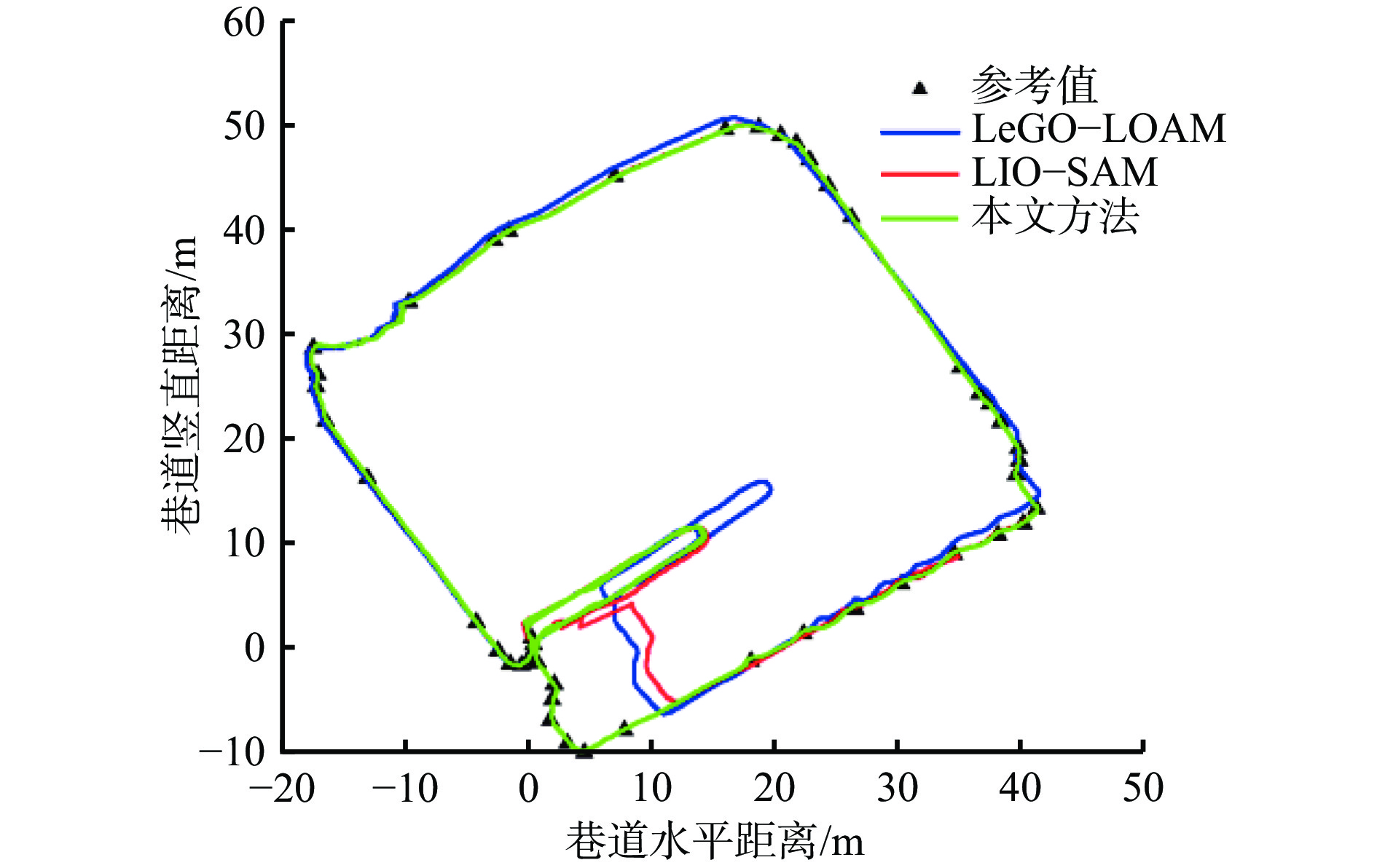
为定量分析本文方法的定位精度,将不同方法定位结果进行对比,如图6所示。可看出本文方法定位结果与参考值最接近,而LeGO−LOAM方法与LIO−SAM方法定位结果与参考值相差较大;在实验的前半段,由于巷道较宽,不存在激光点云被遮挡,且环境特征信息丰富,因此3种方法定位精度均接近参考值;在实验的最后,由于巷道狭窄,环境特征信息减少,LeGO−LOAM方法与LIO−SAM方法定位偏差较大,而本文方法定位结果与参考值拟合程度较高。
不同方法的定位误差见表1。可看出本文方法在水平方向上最大误差仅为0.426 m,平均误差为0.199 m,竖直方向最大误差为1.044 m,平均误差为0.455 m;而LeGO−LOAM方法和LIO−SAM方法的各类误差均大于本文方法,表明本文方法具有较高的定位精度。
表 1 不同方法的定位误差Table 1. Localization errors of different methods方法 误差类别 最大误差/m 最小误差/m 平均误差/m 相对误差/% LeGO−
LOAM水平误差 9.253 0.025 0.708 3.86 竖直误差 7.933 0.032 1.684 3.31 LIO−
SAM水平误差 3.314 0.021 1.475 1.38 竖直误差 2.417 0.024 0.582 1.01 本文
方法水平误差 0.426 0.023 0.199 0.18 竖直误差 1.044 0.026 0.455 0.45 2.3.2 点云地图精度
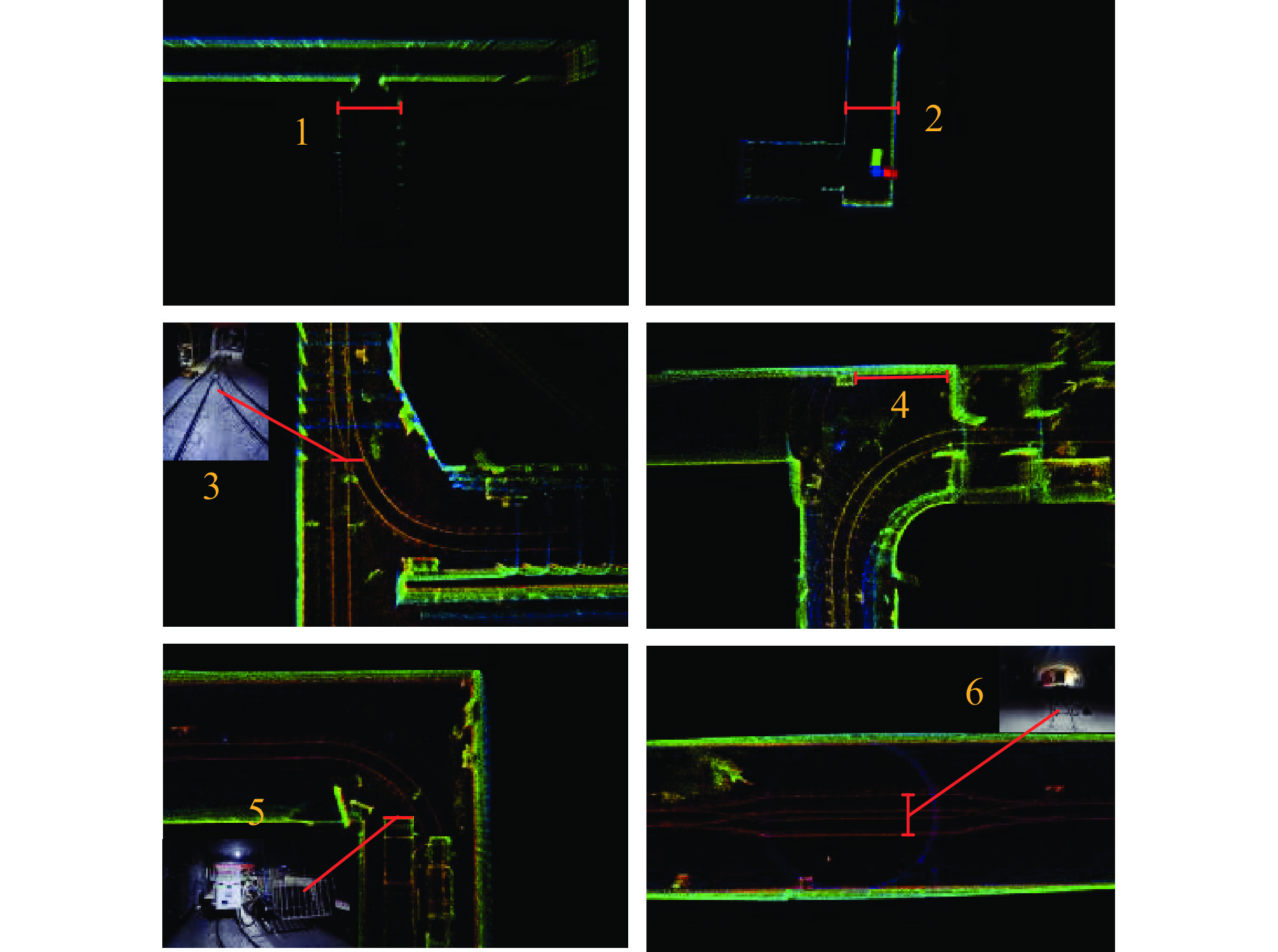
为定量分析本文方法构建的三维点云地图精度,在实验场景用卷尺测量多种特征地物的尺寸,并将不同方法构建的三维点云地图导入点云数据处理软件,测量点云地图中对应特征地物的尺寸,如图7所示。将卷尺实测尺寸与通过不同方法构建的三维点云地图测量的尺寸进行对比,结果见表2。
![]() 图 7 点云地图特征地物尺寸测量Figure 7. Dimension measurement of feature objects in point cloud map表 2 不同方法对应的特征地物尺寸测量误差对比Table 2. Comparison of dimension measurement errors of feature objects using different methods
图 7 点云地图特征地物尺寸测量Figure 7. Dimension measurement of feature objects in point cloud map表 2 不同方法对应的特征地物尺寸测量误差对比Table 2. Comparison of dimension measurement errors of feature objects using different methods方法 特征地物 真实长度/m 测量长度/m 绝对误差/m 相对误差/% LeGO−
LOAM1 4.600 4.356 0.244 5.30 2 2.000 1.916 0.084 4.20 3 0.600 0.585 0.015 2.50 4 3.500 3.663 0.163 4.66 5 0.900 0.923 0.023 2.56 6 1.500 1.482 0.018 1.20 LIO−
SAM1 4.600 4.562 0.038 0.83 2 2.000 1.986 0.014 0.70 3 0.600 0.595 0.005 0.83 4 3.500 3.533 0.033 0.94 5 0.900 0.862 0.038 4.22 6 1.500 1.490 0.010 0.67 本文
方法1 4.600 4.582 0.018 0.39 2 2.000 1.991 0.009 0.45 3 0.600 0.595 0.005 0.83 4 3.500 3.487 0.013 0.37 5 0.900 0.893 0.007 0.78 6 1.500 1.493 0.007 0.47 从表2可看出,LeGO−LOAM方法在特征地物1处的误差最大,在各种特征地物处的平均相对误差为3.40%;LIO−SAM方法相较于LeGO−LOAM方法精度有所提升,平均相对误差为1.37%;本文方法在各种特征地物处的绝对误差和相对误差均小于LeGO−LOAM及LIO−SAM方法,平均相对误差为0.55%,表明本文方法构建的三维点云地图精度较高。
3. 结论
1) 提出了一种基于已知点约束的高精度煤矿巷道三维点云建模方法。对激光雷达点云数据进行多重优化,提高了前端配准的精度和效率;利用附合导线控制测量获取分段已知点,为三维激光点云建模提供全局约束条件;结合已知点和激光SLAM确定的测站点进行联合平差计算,利用非线性优化方法进一步校正全局点云地图,从而提高三维点云建模精度。
2) 实验结果表明,该方法构建的煤矿巷道三维点云地图具有较好的全局一致性和几何结构真实性,在煤矿井下具有较高的定位与建图精度。
-
![]()
图 1 已知点约束的高精度煤矿巷道三维点云建模流程
Figure 1. Workflow of high-precision 3D point cloud modeling for coal mine roadways based on known point constraints
![]()
图 4 不同方法在实验室模拟巷道中的建图结果
Figure 4. Mapping results of different methods in laboratory simulated roadways
![]()
图 5 添加已知点约束前后的煤矿巷道建图结果
Figure 5. Mapping results of coal mine roadways before and after incorporating known point constraints
![]()
图 7 点云地图特征地物尺寸测量
Figure 7. Dimension measurement of feature objects in point cloud map
表 1 不同方法的定位误差
Table 1 Localization errors of different methods
方法 误差类别 最大误差/m 最小误差/m 平均误差/m 相对误差/% LeGO−
LOAM水平误差 9.253 0.025 0.708 3.86 竖直误差 7.933 0.032 1.684 3.31 LIO−
SAM水平误差 3.314 0.021 1.475 1.38 竖直误差 2.417 0.024 0.582 1.01 本文
方法水平误差 0.426 0.023 0.199 0.18 竖直误差 1.044 0.026 0.455 0.45  下载: 导出CSV
下载: 导出CSV
表 2 不同方法对应的特征地物尺寸测量误差对比
Table 2 Comparison of dimension measurement errors of feature objects using different methods
方法 特征地物 真实长度/m 测量长度/m 绝对误差/m 相对误差/% LeGO−
LOAM1 4.600 4.356 0.244 5.30 2 2.000 1.916 0.084 4.20 3 0.600 0.585 0.015 2.50 4 3.500 3.663 0.163 4.66 5 0.900 0.923 0.023 2.56 6 1.500 1.482 0.018 1.20 LIO−
SAM1 4.600 4.562 0.038 0.83 2 2.000 1.986 0.014 0.70 3 0.600 0.595 0.005 0.83 4 3.500 3.533 0.033 0.94 5 0.900 0.862 0.038 4.22 6 1.500 1.490 0.010 0.67 本文
方法1 4.600 4.582 0.018 0.39 2 2.000 1.991 0.009 0.45 3 0.600 0.595 0.005 0.83 4 3.500 3.487 0.013 0.37 5 0.900 0.893 0.007 0.78 6 1.500 1.493 0.007 0.47
下载: 导出CSV
-
[1] 王国法,赵国瑞,任怀伟. 智慧煤矿与智能化开采关键核心技术分析[J]. 煤炭学报,2019,44(1):34-41. WANG Guofa,ZHAO Guorui,REN Huaiwei. Analysis on key technologies of intelligent coal mine and intelligent mining[J]. Journal of China Coal Society,2019,44(1):34-41.
[2] 高毅楠,姚顽强,蔺小虎,等. 煤矿井下多重约束的视觉SLAM关键帧选取方法[J]. 煤炭学报,2024,49(增刊1):472-482. GAO Yinan,YAO Wanqiang,LIN Xiaohu,et al. Visual SLAM keyframe selection method with multiple constraints in underground coal mines[J]. Journal of China Coal Society,2024,49(S1):472-482.
[3] 徐志强,杨邦荣,王李管,等. 巷道实体的三维建模研究与实现[J]. 计算机工程与应用,2008,44(6):202-205. DOI: 10.3778/j.issn.1002-8331.2008.06.061 XU Zhiqiang,YANG Bangrong,WANG Liguan,et al. Laneway entity three-dimensional modeling study and realization[J]. Computer Engineering and Applications,2008,44(6):202-205. DOI: 10.3778/j.issn.1002-8331.2008.06.061
[4] 刘杰,连增增,何荣,等. 基于近景摄影测量技术的地下巷道三维建模[J]. 金属矿山,2020(9):179-183. LIU Jie,LIAN Zengzeng,HE Rong,et al. 3D modeling of underground tunnel based on close range photogrammetry technique[J]. Metal Mine,2020(9):179-183.
[5] 汪云甲,伏永明. 矿井巷道三维自动建模方法研究[J]. 武汉大学学报(信息科学版),2006,31(12):1097-1100. DOI: 10.3969/j.issn.1671-8860.2006.12.016 WANG Yunjia,FU Yongming. On 3D automatic modeling method of mine roadway[J]. Geomatics and Information Science of Wuhan University,2006,31(12):1097-1100. DOI: 10.3969/j.issn.1671-8860.2006.12.016
[6] 徐海,罗周全,刘晓明. 复杂巷道工程三维可视化建模方法研究及应用[J]. 矿冶工程,2011,31(1):19-23. DOI: 10.3969/j.issn.0253-6099.2011.01.006 XU Hai,LUO Zhouquan,LIU Xiaoming. Study of 3D visualization modeling methods for complex roadway engineering and its application[J]. Mining and Metallurgical Engineering,2011,31(1):19-23. DOI: 10.3969/j.issn.0253-6099.2011.01.006
[7] 杨林,马宏伟,王岩. 基于激光惯性融合的煤矿井下移动机器人SLAM算法[J]. 煤炭学报,2022,47(9):3523-3534. YANG Lin,MA Hongwei,WANG Yan. LiDAR-Inertial SLAM for mobile robot in underground coal mine[J]. Journal of China Coal Society,2022,47(9):3523-3534.
[8] 董志华,姚顽强,蔺小虎,等. 煤矿井下顾及特征点动态提取的激光SLAM算法研究[J]. 煤矿安全,2023,54(8):241-246. DONG Zhihua,YAO Wanqiang,LIN Xiaohu,et al. LiDAR SLAM algorithm considering dynamic extraction of feature points in underground coal mine[J]. Safety in Coal Mines,2023,54(8):241-246.
[9] 李猛钢,胡而已,朱华. 煤矿移动机器人LiDAR/IMU紧耦合SLAM方法[J]. 工矿自动化,2022,48(12):68-78. LI Menggang,HU Eryi,ZHU Hua. LiDAR/IMU tightly-coupled SLAM method for coal mine mobile robot[J]. Journal of Mine Automation,2022,48(12):68-78.
[10] 马艾强,姚顽强,蔺小虎,等. 面向煤矿巷道环境的LiDAR与IMU融合定位与建图方法[J]. 工矿自动化,2022,48(12):49-56. MA Aiqiang,YAO Wanqiang,LIN Xiaohu,et al. Coal mine roadway environment-oriented LiDAR and IMU fusion positioning and mapping method[J]. Journal of Mine Automation,2022,48(12):49-56.
[11] KIM H,CHOI Y. Location estimation of autonomous driving robot and 3D tunnel mapping in underground mines using pattern matched LiDAR sequential images[J]. International Journal of Mining Science and Technology,2021,31(5):779-788. DOI: 10.1016/j.ijmst.2021.07.007
[12] 刘敬娜,徐华龙,徐正国,等. 智慧矿山工业广场三维自动建模技术研究[J]. 时空信息学报,2024,31(4):524-532. LIU Jingna,XU Hualong,XU Zhengguo,et al. 3D automatic modeling technology for smart mining industrial square[J]. Journal of Spatio-Temporal Information,2024,31(4):524-532.
[13] WANG Jiaheng,WANG Liguan,PENG Pingan,et al. Efficient and accurate mapping method of underground metal mines using mobile mining equipment and solid-state lidar[J]. Measurement,2023,221. DOI: 10.1016/j.measurement.2023.113581.
[14] 刘少杰,李志海,刘治翔,等. 基于激光扫描和三维栅格地图的掘进巷道空间建模方法研究[J]. 工程设计学报,2023,30(3):306-314. DOI: 10.3785/j.issn.1006-754X.2023.00.034 LIU Shaojie,LI Zhihai,LIU Zhixiang,et al. Research on spatial modeling method for excavation tunnels based on laser scanning and 3D grid map[J]. Chinese Journal of Engineering Design,2023,30(3):306-314. DOI: 10.3785/j.issn.1006-754X.2023.00.034
[15] 江记洲,郭甲腾,吴立新,等. 基于三维激光扫描点云的矿山巷道三维建模方法研究[J]. 煤矿开采,2016(2):109-113. JIANG Jizhou,GUO Jiateng,WU Lixin,et al. 3-D modeling method of mine roadway based on 3-D laser scanning point cloud[J]. Coal Mining Technology,2016(2):109-113.
[16] GURGEL M J M,PREUSSE A. New opportunities and challenges in surveying underground cavities using photogrammetric methods[J]. International Journal of Mining Science and Technology,2021,31(1):9-13. DOI: 10.1016/j.ijmst.2020.12.005
[17] BESL P J,MCKAY N D. A method for registration of 3-D shapes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1992,14(2):239-256. DOI: 10.1109/34.121791
[18] KIM G,KIM A. Scan context:egocentric spatial descriptor for place recognition within 3D point cloud map[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems,Madrid,2018:4802-4809.
[19] 张继贤,肖雨彤. 仙泉煤矿井下导线网设计与测量成果分析[J]. 煤炭工程,2019,51(5):163-167. ZHANG Jixian,XIAO Yutong. Underground traverse network design and analysis of measurement results in Xianquan Coal Mine[J]. Coal Engineering,2019,51(5):163-167.
[20] SHAN Tixiao,ENGLOT B. LeGO-LOAM:lightweight and ground-optimized lidar odometry and mapping on variable terrain[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems,Madrid,2018:4758-4765.
[21] SHAN Tixiao,ENGLOT B,MEYERS D,et al. LIO-SAM:tightly-coupled lidar inertial odometry via smoothing and mapping[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems,Las Vegas,2020:5135-5142.
计量
- 文章访问数: 575
- HTML全文浏览量: 16
- PDF下载量: 38
