
Research on positioning method of mine track locomotives based on not line of sight error suppression
-
摘要: 矿井轨道机车定位方法以超宽带(UWB)定位为主,但井下运输巷道环境复杂,非视距传播多发,对UWB定位精度的影响严重。目前针对非视距传播引起的定位误差研究存在算法复杂、实时定位差等问题。通过分析轨道机车定位特点,在基于信号到达时间(TOA)的UWB定位技术基础上,提出一种基于非视距误差抑制的矿井轨道机车定位方法。在轨道机车不同位置安装2个定位卡,采用射频识别技术准确划分定位卡与定位基站的相对位置关系,根据UWB定位信号在非视距传播条件下测距值比实际值大的情况,采用2个定位卡之间距离测算值与实际值差值的经验范围,推算出不同定位卡和定位基站位置关系下非视距传播条件的鉴别阈值,通过该鉴别阈值剔除由非视距路径传播定位信号的测距值,使用由视距路径传播定位信号的测距值进行定位计算,实现对非视距误差的抑制,从而提高矿井轨道机车平均定位精度。测试结果表明:使用基于非视距误差抑制的矿井轨道机车定位方法,在定位信号处于视距传播条件时,机车平均定位误差均在1 m以内;在定位信号处于非视距传播条件时,大部分非视距误差得到了有效抑制,平均定位精度在1 m左右,轨道机车定位精度较常规基于TOA的UWB定位方法大幅度提升。Abstract: The positioning method for mine track locomotives is mainly based on ultra wide band (UWB) positioning. But the complex environment of underground transportation roadways and frequent not line of sight(NLOS) propagation seriously impact the precision of UWB positioning. At present, research on positioning errors caused by NLOS has problems such as complex algorithms and poor real-time positioning. Based on the analysis of the positioning characteristics of railway locomotives and the UWB positioning technology based on the time of arrival (TOA), a positioning method of mine track locomotive based on NLOS error suppression is proposed. Two positioning cards are installed at different positions on the track locomotive. Radio frequency identification technology is used to accurately divide the relative position relationship between the positioning card and the positioning base station. The distance measurement value of the UWB positioning signal is greater than the actual value under NLOS propagation conditions. Based on this situation, the empirical range of the difference between the distance measurement value and the actual value between the two positioning cards is used to calculate the discrimination threshold for NLOS propagation conditions under different position nelationship between positioning cards and positioning base station. By using this discrimination threshold, the ranging value of the positioning signal propagated by NLOS path is eliminated. The ranging value of the positioning signal propagated by the line of sight path is used for positioning calculation, so that to suppress NLOS errors and improve the average positioning precision of mine track locomotives. The test results show that using the positioning method of mine track locomotives based on NLOS error suppression, the average positioning error of locomotives is within 1 m when the positioning signal is in line of sight propagation conditions. When the positioning signal is in NLOS propagation conditions, most of the NLOS errors are effectively suppressed. The average positioning precision is about 1 meter. The positioning precision of track locomotives has been greatly improved compared with normal UWB positioning method based on TOA.
-
0. 引言
矿井轨道机车是在专门轨道上运行的运输工具,如地轨机车、单轨吊等,具有运输效率高、爬坡能力强、行驶路径固定等特点[1],是矸石、物料等运输的主要手段,也是矿山生产体系的关键环节。随着矿山智能化建设的不断推进,通过机械化、自动化、信息化和智能化减少矿井作业人员,已成为安全、高效、绿色矿井的必然选择[2],矿井轨道机车正向着自动化运转、无人化连续运输的智能配送方向发展[3-5]。而实现矿井轨道机车运输智能配送,需要精准的定位导航服务[6-10]。矿井轨道机车定位采用以超宽带(Ultra Wide Band,UWB)为主,惯性导航、里程计和即时定位与地图构建(Simultaneous Localization and Mapping,SLAM)为辅的矿井车辆联合定位方法[11]。但井下运输巷道环境复杂,非视距(Not Line of Sight,NLOS)传播多发,而NLOS误差对UWB定位精度的影响尤为严重,所以消除由NLOS引起的定位误差是提高矿井轨道机车定位精度的关键。
许多学者针对NLOS引起的定位误差进行了研究。文献[12]利用信号到达时间测量值的时程来重构视距(Line of Sight,LOS)的信号到达时间测量值,虽然定位误差较小,但不能进行实时定位。文献[13]采用IEEE802.15.4a 的UWB信道模型,设计了一种NLOS鉴别和消除方法,该方法局限性较大,不适用于LOS与NLOS同时存在的环境。文献[14]提出利用新息来调整卡尔曼滤波器增益,进而滤除NLOS误差,该方法中各参数不能自适应调整,不适合实际应用。文献[15]采用偏移卡尔曼滤波(Biased Kalmanfilter,BKF)算法进行NLOS误差抑制,认为NLOS服从指数分布,但NLOS误差的分布模型没有统一定论,且将测量噪声的均值加入卡尔曼滤波计算中,不具有代表性。文献[16]利用测量样本的标准差和测量噪声的标准差鉴别NLOS误差,提高测量精度,但算法复杂,时延较大,且不能进行实时定位。
针对NLOS引起的定位误差,本文采用射频识别(Radio Frequency Identification,RFID)技术对定位卡与定位基站的相对位置关系进行准确划分,通过计算定位卡间距测量值与实际值差值的经验范围,推算出NLOS鉴别阈值,进而对NLOS误差进行抑制。
1. UWB定位原理
UWB技术采用功率谱密度极低和脉冲宽度极窄的基带脉冲传递信息,由于脉冲宽度达到纳秒或次纳秒级,所以时间分辨率较高,理论上可提供厘米级甚至毫米级的定位精度。UWB定位通常基于接收信号强度指示(Received Signal Strength Indicator,RSSI)、信号到达时间(Time of Arrival,TOA)、信号到达角度(Angle of Arrival,AOA)、信号到达时间差(Time Difference of Arrival,TDOA)4种[17-18]。其中TOA方法通过检测UWB信号多径成分进行到达时间估计,能有效利用UWB良好的时间分辨率,满足定位精度需求[19]。
TOA定位方法多采用双向飞行时间(Two Way-Time of Flight,TW−TOF)进行测距。TW−TOF原理如图1所示。
定位卡在Tp1时刻发射脉冲信号,定位基站在Tb1时刻接收该信号并对信号进行处理,定位基站在Tb2时刻发射回应信号,定位卡在Tp2时刻接收该回应信号,则定位卡与定位基站之间的距离为
$$d=\frac{c t}{2} $$ (1) $$t=\left(T_{\mathrm{p} 2}-T_{\mathrm{p} 1}\right)-\left(T_{\mathrm{b} 2}-T_{b 1}\right) $$ (2) 式中:c为电磁波传播速度;t为脉冲信号飞行时间。
该方法无需考虑时间同步问题,消除了时钟漂移误差对测距造成的影响[20]。
2. NLOS定位误差
由TOA定位原理可知,UWB定位信号必须沿直线进行LOS传播,才能保证测距的准确性。但矿井是密集的NLOS场景,信号遮挡情况常见,定位信号经常处于NLOS传播状态[21]。
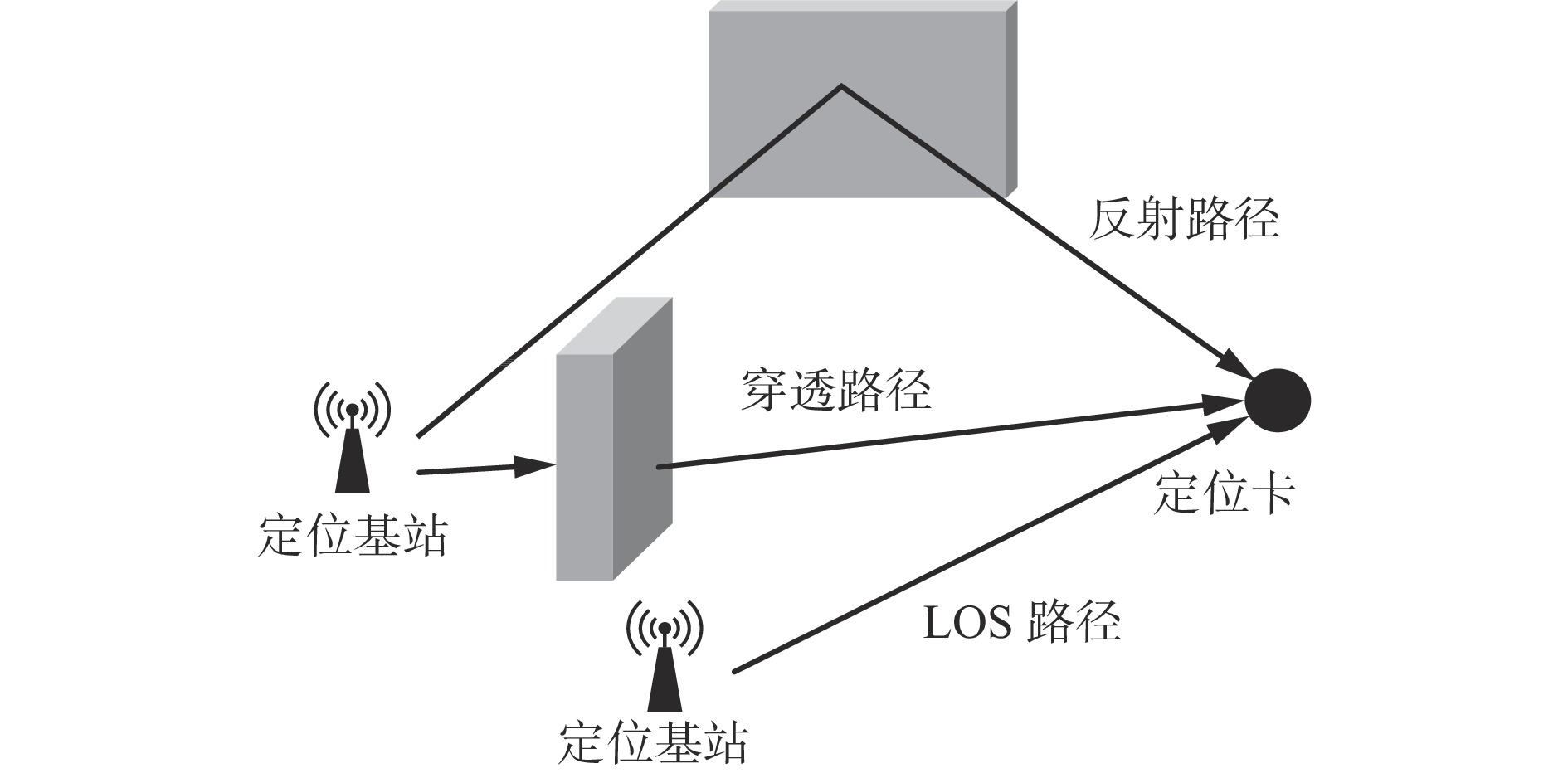
UWB定位信号LOS传播与NLOS传播(反射路径和穿透路径)如图2所示。在NLOS条件下,由于定位卡与定位基站之间信号传播被遮挡,UWB定位信号无法直接到达,需要穿透障碍物或经过反射路径才能被接收。
![]() 图 2 UWB定位信号LOS传播与NLOS传播Figure 2. Line of sight propagation and not line of sight propagation of UWB positioning signal
图 2 UWB定位信号LOS传播与NLOS传播Figure 2. Line of sight propagation and not line of sight propagation of UWB positioning signalUWB定位信号穿透障碍物时,信号在障碍物内的传播速度小于自由空间传播速度,造成信号波形畸变,导致最终的TOA距离估计结果恒大于收发节点间实际距离[22];UWB定位信号在经过反射路径后,也会造成实际传播路径与直线距离的几何距离误差。2种NLOS误差均导致测距值大于真实值,使定位精度显著下降[23]。
3. NLOS误差抑制
在地面UWB室内定位场景中,通常采用建立定位误差模型(多项式函数模型、指数函数模型、对数函数模型等)[24]的方式对测距值进行修正。但定位误差模型是在有多个基站铺设的室内二维或三维定位场景下提出的,需要多组观测量才能对定位误差进行有效的建模拟合,进而对定位误差进行有效补偿。但是,矿井定位基站铺设成本高,且由于巷道狭长,巷道内多采用一维定位,所以巷道内定位基站铺设的密度一般不大,大部分情况下,定位卡在某位置上只能与1个定位基站进行数据交互,没有足够有效的观测量支撑建模拟合和误差补偿。为了实现矿井轨道机车的高精度定位,需要根据矿井轨道机车定位特点,设计合适的误差抑制方法。
3.1 矿井轨道机车定位特点
从动目标定位角度对矿井轨道机车定位进行分析,得出主要特点:① 矿井轨道机车一般由驾驶室、动力装置、驱动装置、制动装置、承载装置、连接装置等组成,车身普遍较长,可达十几米以上。可在车身的不同位置安装多个定位卡,为机车定位提供更多方法选择。② 轨道机车沿专用轨道行驶,行驶路径固定,车身各部位到巷道壁的距离固定,机车只有前进和后退2个行驶方向,行车的冗余空间小,因此,轨道机车在巷道内运行可近似为一维运动。③ 定位卡可从轨道机车取电,可用电量充足,降低了定位卡低功耗设计要求。
3.2 定位方法设计
在轨道机车2个固定位置安装定位卡,定位基站安装在轨道机车一侧巷道壁,2个定位卡之间的距离和定位基站到机车的距离都是确定的已知量。设定位基站为A,前定位卡为B,后定位卡为C,定位基站A到2个位卡的距离分别为$ {L_{{\rm{AB}}}} $和$ {L_{{\rm{AC}}}} $,到2个定位卡连线的距离为$ {L_{{\rm{AD}}}} $,2个定位卡同时与定位基站进行TOA定位。机车行驶过程中定位基站与定位卡的位置关系如图3所示,机车行驶过程中,根据定位卡是否到达定位基站位置(相同一维坐标),可将定位卡与定位基站的位置关系分为a,b,c 3种状态。
![]() 图 3 定位基站与定位卡的位置关系Figure 3. Position relationship between reader and identification card
图 3 定位基站与定位卡的位置关系Figure 3. Position relationship between reader and identification card状态a:定位卡B未到达定位基站A坐标处,2个位卡位于定位基站A同一侧。
状态b:定位卡B经过定位基站A坐标,定位卡C还未到达定位基站A坐标处,2个卡分别位于定位基站A两侧。
状态c:定位卡C经过定位基站A坐标,2个定位卡位于定位基站A同一侧。
通过UWB测距,可得到$ {L_{{\rm{AB}}}} $,$ {L_{{\rm{AC}}}} $,其中,在不考虑测距误差的理想情况下,通过测距值计算在a、b、c 3种状态下2个定位卡之间的距离$ {L_{{\rm{BC}}}} $。
$$ {L_{{\rm{BC}}}} = \left\{ \begin{array}{l} \sqrt {{L_{\rm{AC}}^2} - {L_{{\rm{AD}}}^2}} - \sqrt {{L_{{\rm{AB}}}^2} - {L_{{\rm{AD}}}^2}} \qquad 状态{\rm{a}} \\ \sqrt {{L_{{\rm{AB}}}^2} - {L_{{\rm{AD}}}^2}} + \sqrt {{L_{{\rm{AC}}}^2} - {L_{{\rm{AD}}}^2}} \qquad 状态{\rm{b}} \\ \sqrt {{L_{{\rm{AB}}}^2} - {L_{{\rm{AD}}}^2}} - \sqrt {{L_{{\rm{AC}}}^2} - {L_{{\rm{AD}}}^2}} \qquad 状态{\rm{c}} \end{array} \right. $$ (3) 设2个位卡之间的实际距离为$ {L_{{\text{real}}}} $,如果分别在每种状态下的定位卡与定位基站之间添加遮挡条件,使定位信号进行NLOS传播,根据遮挡存在位置的不同,有以下结论:
1) 当定位基站A与定位卡B之间有遮挡,$ {L_{{\rm{AB}}}} $增加,在状态a下,$ {L_{{\rm{BC}}}} $<$ {L_{{\rm{real}}}} $,在状态c下,$ {L_{{\rm{BC}}}} $>$ {L_{{\rm{real}}}} $,此时以$ {L_{{\rm{AC}}}} $计算机车位置更准确。
2) 当定位基站A与定位卡C之间有遮挡,$ {L_{{\rm{AC}}}} $增加,在状态a下,$ {L_{{\rm{BC}}}} $>${L_{{\rm{real}}}}$,在状态c下,$ {L_{{\rm{BC}}}} $<$ {L_{{\rm{real}}}} $,此时以$ {L_{{\rm{AB}}}} $计算机车位置更准确。
3) 在状态b下,无论遮挡在哪一侧,都会导致$ {L_{{\rm{BC}}}} $增加,无法判断遮挡位置和更准确的测距值。
4) 在定位基站A与定位卡B和定位卡C之间同时存在遮挡时,无法判定更准确的测距值。
如果2个定位卡之间距离较近,则机车行驶过程中处于状态b的时间非常短暂,因此在状态b下不进行NLOS传播识别和误差抑制,不会对机车的平均定位精度造成影响;并且,矿井遮挡条件多为机架、设备、人员等,这些遮挡条件同时遮挡2个定位卡与定位基站之间的定位信号的可能性很小,因此,在状态a和状态c下进行NLOS传播的准确识别,就可实现对NLOS误差的有效抑制。
3.3 状态区分
由定位方法原理可知,对定位卡与定位基站的相对位置关系进行准确区分,是定位方法有效的前提条件。本文采用RFID技术准确判断定位卡是否到达定位基站位置坐标处,进而对定位卡与定位基站的相对位置关系进行准确区分。
RFID利用射频信号的空间耦合、电感耦合和电磁耦合的传播特性,实现对被识别物体的自动识别。RFID技术设备一般由无源位置标签、发射/收天线和RFID读卡器3个部分组成,如图4所示。RFID读取器通过发射天线发送一定频率的射频信号,当无源位置标签进入发射天线工作区域时产生感应电流,从而被激活,将电子编码信息通过内置天线发送出去,RFID读取器通过接收天线接收从无源位置标签发送来的载波信号,对信号进行解调和解码。RFID读取器与定位卡连接,将识别的位置信息发送至定位卡。
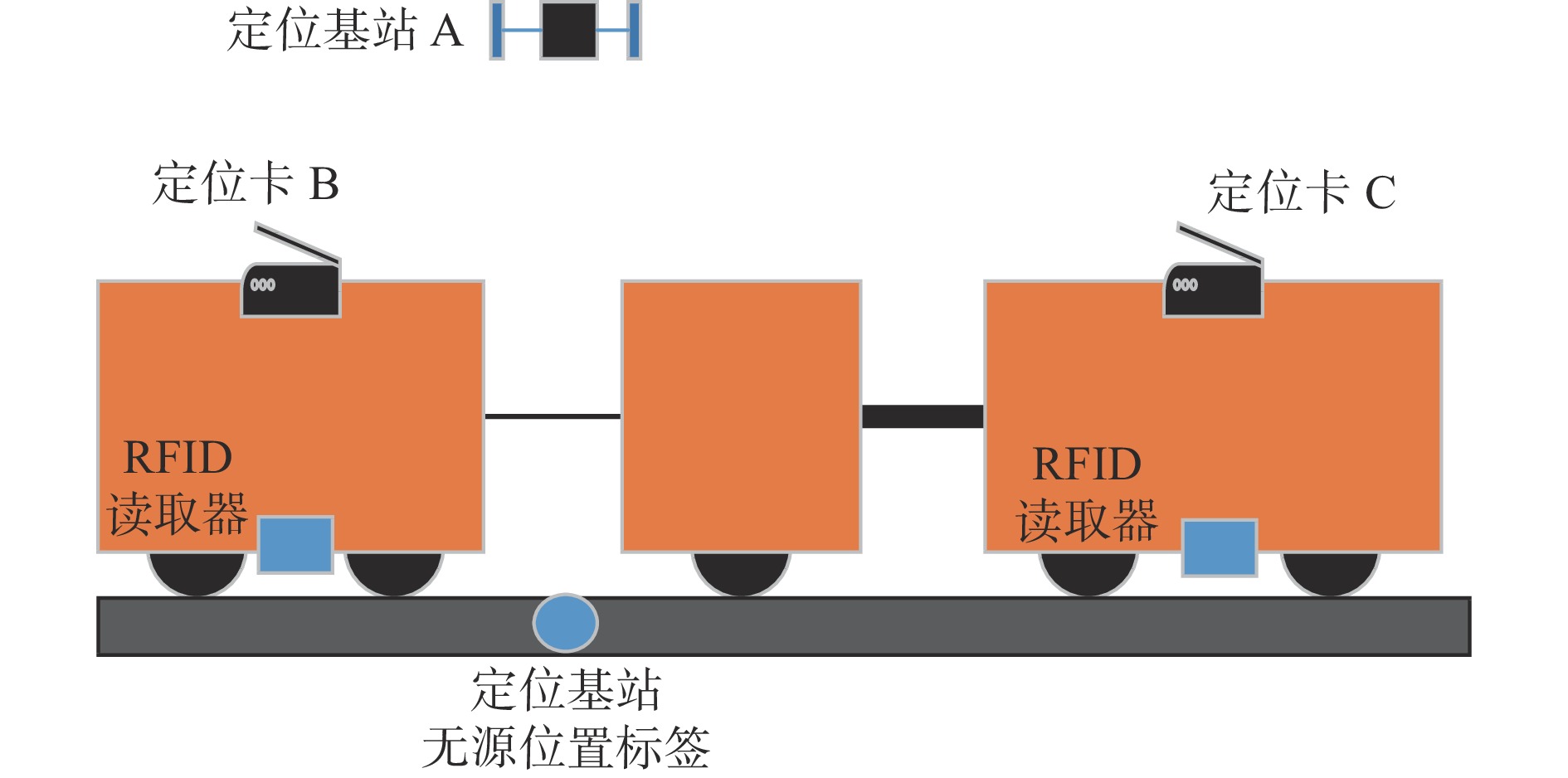
RFID设备在轨道机车上安装如图5所示,无源位置标签附着在轨道上与定位基站相同位置坐标处,用于标志定位基站位置坐标,RFID读取器安装在机车上每个定位卡垂直下方靠近轨道位置,当定位卡随机车到达定位基站位置坐标处时,通过RFID设备可准确捕捉该状态,进而判定定位卡与定位基站的相对位置关系,准确区分状态a,b,c。
3.4 定位卡时钟同步
根据定位方法原理,需要2个定位卡同时与定位基站进行基于TOA的UWB测距,实现方式主要有2种:① 由定位基站发起定位,需要定位卡保持监听状态,定位卡一旦收到定位基站发起的定位信号,马上发射响应信号。② 由定位卡发起定位,需要定位卡时钟同步。由于轨道机车定位基站可与人员定位共用,以降低定位系统布线的复杂性和基站铺设成本,所以选用定位卡发起定位的方式。
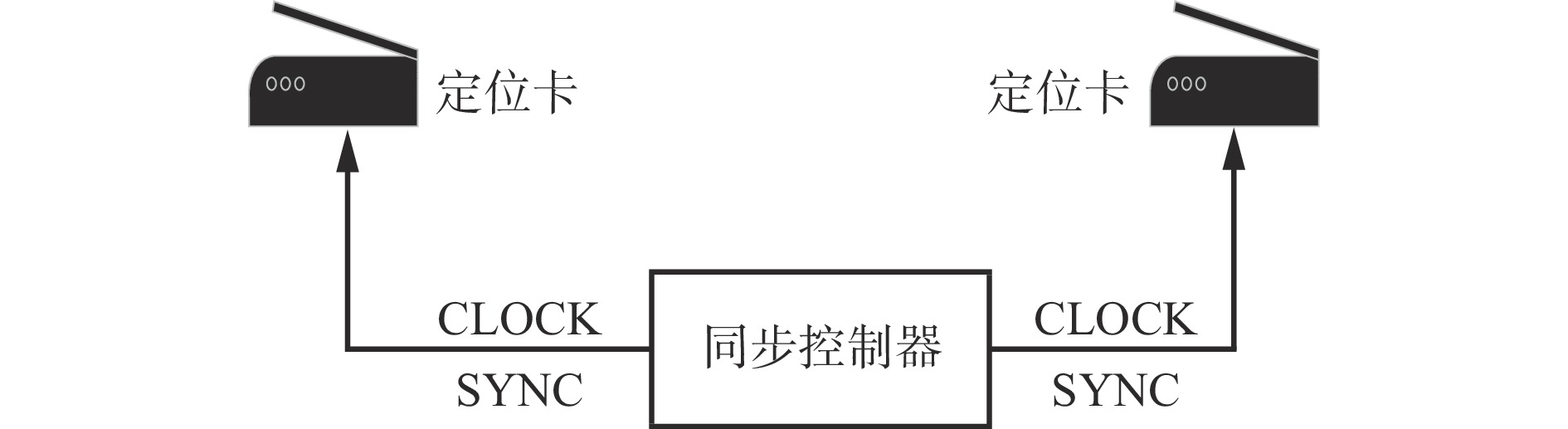
定位卡固定安装在机车上,采用有线时钟同步方式实现定位卡时钟同步,如图6所示。2个定位卡通过CAT5类线连接同步控制器,同步控制器通过外部时钟源(CLOCK)和时钟同步信号(SYNC)配合实现2个定位卡的时钟同步。
4. NLOS鉴别
由于在UWB定位中存在测距固有误差、安装误差等,不能直接以$ {L_{{\rm{BC}}}} $和$ {L_{{\rm{real}}}} $的大小关系作为鉴别是否存在NLOS传播的依据。本文通过大量测试,求得$ {L_{{\rm{BC}}}} $和$ {L_{{\rm{real}}}} $差值$ \alpha $的经验范围,确定NLOS鉴别的阈值。
设测试轨道长度为100 m,定位基站安装于轨道机车一侧,在轨道机车2个固定位置安装定位卡和RFID读取器,定位基站与定位卡的垂直高度差模拟实际使用中的情况,设为50 cm,定位基站距离轨道机车1.5 m。定位基站通过RS232接口将定位数据传播给计算机,通过Matlab对定位数据进行处理。测试方案如图7所示。
根据图3中位置关系可知,在状态a和状态c下$ {L_{{\rm{BC}}}} $和$ {L_{{\rm{real}}}} $的差值为
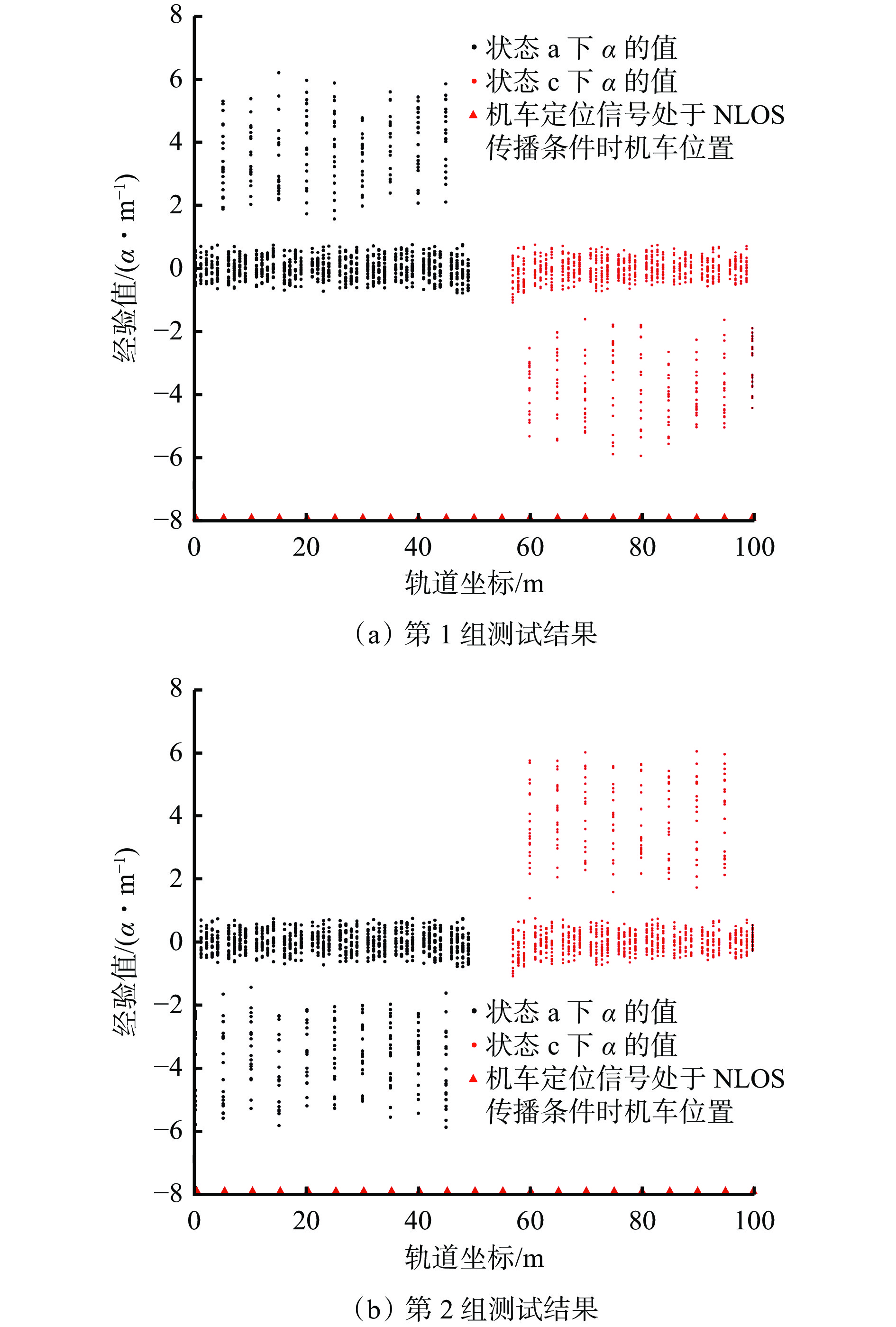
$$ \alpha = \left\{ \begin{array}{l} \sqrt {{L_{{\rm{AC}}}^2} - {L_{{\rm{AD}}}^2}} - \sqrt {{L_{{\rm{AB}}}^2} - {L_{{\rm{AD}}}^2}} - {L_{{\rm{real}}}} \qquad 状态 {\rm{a}} \\ \sqrt {{L_{{\text{AB}}}^2} - {L_{{\rm{AD}}}^2}} - \sqrt {{L_{{\text{AC}}}^2} - {L_{{\text{AD}}}^2}} - {L_{{\text{real}}}} \qquad 状态{\rm{ c}} \end{array} \right. $$ (4) 机车从起始点开始沿轨道行驶,每隔1 m进行1次机车UWB测距,并计算α,每隔5 m在定位卡与定位基站之间随机设置遮挡条件,使UWB定位信号处于NLOS传播条件。分别进行2组测试:第1组测试中,将遮挡条件设置在定位卡C与定位基站A之间;第2组测试中,将遮挡条件设置在定位卡B与定位基站A之间。每组进行50次测试,剔除处于状态b的结果,分别得到2组经验值的测试结果,如图8所示。
由图8可看出,在未增加遮挡的位置,$\alpha $变化很小,变化幅度在1以内,增加遮挡后,$ \alpha $发生大幅度变化,变化幅度在1.5~7。说明增加遮挡前后$\alpha $变化明显,具有很强的区分度,可将$\alpha $作为定位信号NLOS传播的鉴别依据。
设鉴别阈值为$ \varepsilon $,NLOS传播的鉴别和处理方式如下。
状态a:如果$ \left| \alpha \right| < \varepsilon $,为LOS传播;如果$ \left| \alpha \right| \geqslant \varepsilon $,为NLOS传播,$ \alpha \geqslant \varepsilon $时定位卡C与定位基站A之间UWB定位信号是NLOS传播,采用定位基站A与定位卡C的测距值更准确,$ \alpha < \varepsilon $时定位卡B与定位基站A之间UWB定位信号是NLOS传播,采用定位基站A与定位卡B的测距值更准确。
状态c:如果$ \left| \alpha \right| < \varepsilon $,为LOS传播;如果$ \left| \alpha \right| \geqslant \varepsilon $,为NLOS传播,$ \alpha \geqslant \varepsilon $时定位卡B与定位基站A之间UWB定位信号是NLOS传播,采用定位基站A与定位卡B的测距值更准确,$ \alpha < \varepsilon $时定位卡C与定位基站A之间UWB定位信号是NLOS传播,采用定位基站A与定位卡C的测距值更准确。
5. 试验验证
为验证本文方法的有效性和优越性,将本文方法与目前矿井轨道机车定位常规使用的基于TOA的UWB定位方法进行对比试验。
采用DecaWave公司的DW1000模块作为定位卡和定位基站UWB测距信号采集设备,该模块集成了天线、所有的射频电路、电源管理和时钟电路。采用HR1907Q型RFID读取器及配套位置标签。时钟同步控制器采用Silicon的Si5317时钟芯片,提供38.4 MHz的高精度时钟。在矿井车场搭建测试试验平台,测试轨道长度为100 m。通过经验值测试计算,得到在矿井测试场景的NLOS鉴别阈值$ \varepsilon $=1.8。
机车以1 m/s的速度行驶,定位卡发起定位的频率为1 Hz,即每隔1 m进行一次定位,并计算定位误差。每隔5 m,在定位卡与定位基站之间设置遮挡条件,使UWB信号处于NLOS传播条件,采用基于TOA的UWB定位方法进行50次测试,得到各坐标位置定位误差和平均误差,如图9所示。
![]() 图 9 基于TOA的UWB定位方法得到的定位误差和平均定位误差Figure 9. Positioning error and the average positioning error obtained from UWB positioning method based on time of arrival
图 9 基于TOA的UWB定位方法得到的定位误差和平均定位误差Figure 9. Positioning error and the average positioning error obtained from UWB positioning method based on time of arrival由图9可看出,采用常规基于TOA的UWB定位方法在LOS传播条件下各坐标位置的机车定位误差和平均定位误差都在1 m以内,在NLOS传播条件下各坐标位置定位误差和平均定位误差明显增大,最大定位误差5 m以上,各坐标位置平均定位误差均在3 m以上。
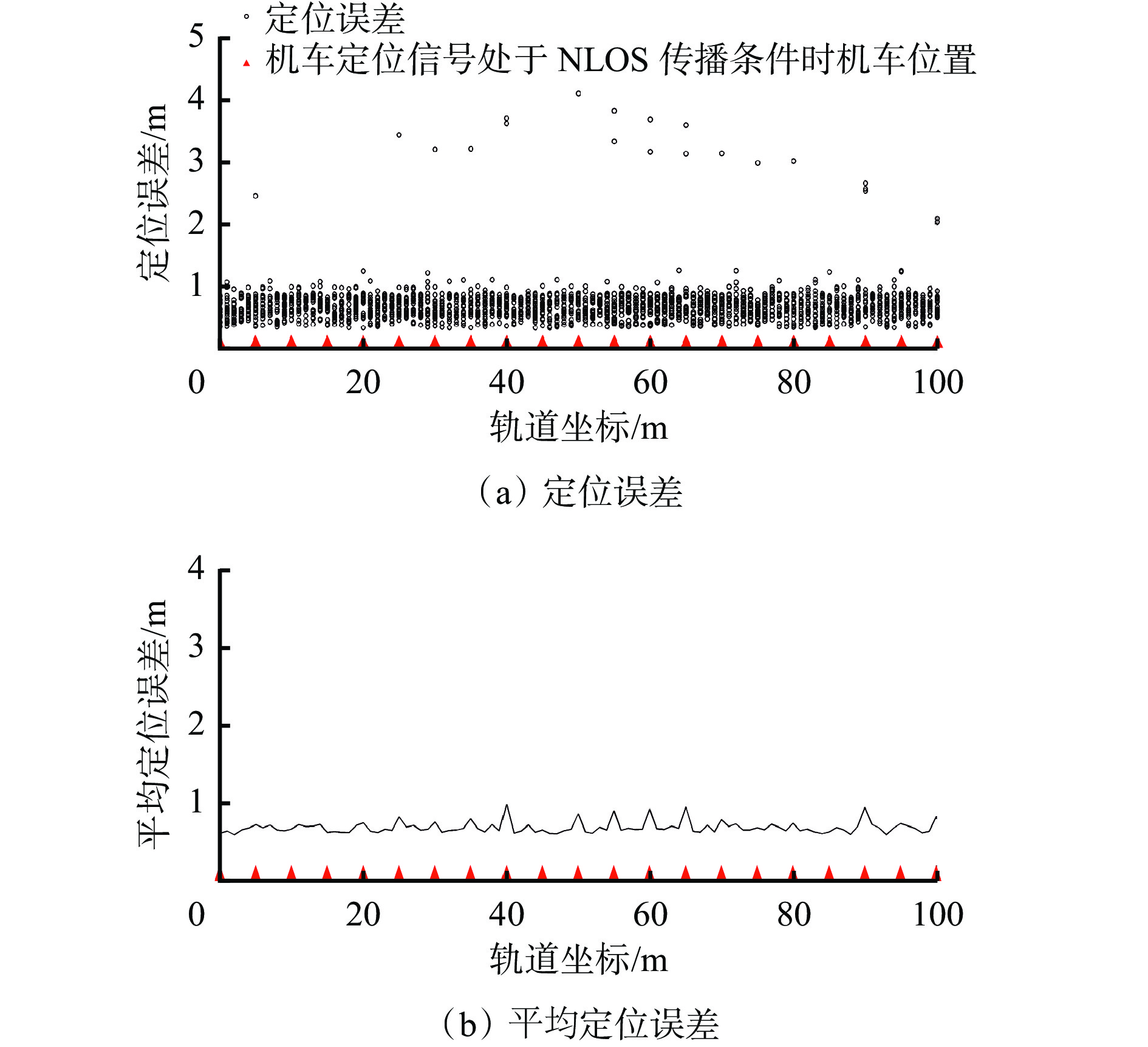
相同实验条件下,采用基于NLOS误差抑制的矿井轨道机车定位方法,根据NLOS鉴别的结果,选择没有遮挡的UWB测距结果进行定位,同样进行50次试验,得到各坐标位置定位误差和平均定位误差,如图10所示。部分坐标位置平均定位误差情况见表1。
![]() 图 10 采用NLOS误差抑制方法后定位误差和平均定位误差Figure 10. Positioning error and average positioning error after using not line of sight error suppression method表 1 部分坐标位置平均定位误差Table 1. Average positioning error of partial coordinate positions
图 10 采用NLOS误差抑制方法后定位误差和平均定位误差Figure 10. Positioning error and average positioning error after using not line of sight error suppression method表 1 部分坐标位置平均定位误差Table 1. Average positioning error of partial coordinate positionsm 序号 坐标
位置常规方法平均定位误差 本文方法平均定位误差 1 11 0.52 0.51 2 12 0.64 0.67 3 15 3.80 0.45 4 16 0.46 0.36 5 17 0.42 0.32 6 22 0.32 0.39 7 60 5.41 2.42 8 61 0.45 0.41 9 90 4.10 0.30 10 95 3.78 0.58 由图10可看出,使用基于NLOS误差抑制的矿井轨道机车定位方法在LOS传播条件位置的定位误差和平均定位误差均在1 m以内,与采用目前常规基于TOA的UWB定位方法精度相同;在增加遮挡位置,信号处于NLOS传播条件,采用基于NLOS误差抑制的矿井轨道机车定位方法后,除少数定位过程外,大部分NLOS误差仍然控制在1 m左右,定位精度大幅提高,满足矿井安全生产和智能化建设对轨道机车定位的需求。
6. 结论
1) NLOS传播条件给矿井轨道机车定位造成很大的定位误差,且定位测距值大于实际值。
2) 通过计算2个定位卡间距测算值与实际值差值的经验范围,推算出在不同定位卡和定位基站位置关系下NLOS传播条件的鉴别阈值。
3) 通过对比试验证明,使用基于NLOS误差抑制的矿井轨道机车定位方法,在定位信号处于LOS传播条件时,机车平均定位误差均在1 m以内,在定位信号处于NLOS传播条件时,大部分NLOS误差得到有效抑制,平均定位精度在1 m左右,轨道机车定位精度较采用常规基于TOA的UWB定位方法大幅度提升。
-
![]()
图 2 UWB定位信号LOS传播与NLOS传播
Figure 2. Line of sight propagation and not line of sight propagation of UWB positioning signal
![]()
图 3 定位基站与定位卡的位置关系
Figure 3. Position relationship between reader and identification card
![]()
图 9 基于TOA的UWB定位方法得到的定位误差和平均定位误差
Figure 9. Positioning error and the average positioning error obtained from UWB positioning method based on time of arrival
![]()
图 10 采用NLOS误差抑制方法后定位误差和平均定位误差
Figure 10. Positioning error and average positioning error after using not line of sight error suppression method
表 1 部分坐标位置平均定位误差
Table 1 Average positioning error of partial coordinate positions
m 序号 坐标
位置常规方法平均定位误差 本文方法平均定位误差 1 11 0.52 0.51 2 12 0.64 0.67 3 15 3.80 0.45 4 16 0.46 0.36 5 17 0.42 0.32 6 22 0.32 0.39 7 60 5.41 2.42 8 61 0.45 0.41 9 90 4.10 0.30 10 95 3.78 0.58  下载: 导出CSV
下载: 导出CSV
-
[1] 赵远,吉庆,王腾. 煤矿智能无轨辅助运输技术现状与展望[J]. 煤炭科学技术,2021,49(12):209-216. ZHAO Yuan,JI Qing,WANG Teng. Current status and prospects of intelligent trackless auxiliary transportation technology in coal mines[J]. Coal Science and Technology,2021,49(12):209-216.
[2] 孙继平. 煤矿智能化与矿用5G和网络硬切片技术[J]. 工矿自动化,2021,47(8):1-6. SUN Jiping. Coal mine intelligence,mine 5G and network hard slicing technology[J]. Industry and Mine Automation,2021,47(8):1-6.
[3] 谭章禄,吴琦. 智慧矿山理论与关键技术探析[J]. 中国煤炭,2019,45(10):30-40. TAN Zhanglu,WU Qi. Analysis and discussion of smart mine theory and key technologies[J]. China Coal,2019,45(10):30-40.
[4] 李梅,杨帅伟,孙振明,等. 智慧矿山框架与发展前景研究[J]. 煤炭科学技术,2017,45(1):121-128,134. LI Mei,YANG Shuaiwei,SUN Zhenming,et al. Study on framework and development prospects of intelligent mine[J]. Coal Science and Technology,2017,45(1):121-128,134.
[5] 葛世荣. 煤矿机器人现状及发展方向[J]. 中国煤炭,2019,45(7):18-27. GE Shirong. Present situation and development direction of coal mine robots[J]. China Coal,2019,45(7):18-27.
[6] 郭梁,宋建成,宁振兵,等. 基于捷联惯性导航的矿用单轨吊机车定位算法[J]. 工矿自动化,2021,47(1):49-54,86. DOI: 10.13272/j.issn.1671-251x.2020080015 GUO Liang,SONG Jiancheng,NING Zhenbing,et al. Positioning algorithm of mine-used monorail crane locomotive based on strapdown inertial navigation[J]. Industry and Mine Automation,2021,47(1):49-54,86. DOI: 10.13272/j.issn.1671-251x.2020080015
[7] 刘宏杰,张慧,张喜麟,等. 煤矿无轨胶轮车智能调度管理技术研究与应用[J]. 煤炭科学技术,2019,47(3):81-86. LIU Hongjie,ZHANG Hui,ZHANG Xilin,et al. Research and application of intelligent dispatching and management technology for coal mine trackless rubber-tyred vehicle[J]. Coal Science and Technology,2019,47(3):81-86.
[8] 任文清,高小强. 智能矿山建设实践及关键技术[J]. 工矿自动化,2021,47(2):116-120. REN Wenqing,GAO Xiaoqiang. Construction practice and key technologies of intelligent mine[J]. Industry and Mine Automation,2021,47(2):116-120.
[9] 袁晓明. 煤矿无轨辅助运输工艺和发展方向研究[J]. 煤炭工程,2019,51(5):1-5. YUAN Xiaoming. Analysis of coal mine trackless auxiliary transportation technology and the development direction[J]. Coal Engineering,2019,51(5):1-5.
[10] 任志勇,石琴. 矿用电动无轨辅助运输装备发展现状及关键技术[J]. 煤炭科学技术,2021,49(7):118-123. REN Zhiyong,SHI Qin. Development status and key technologies on mine-used electric auxiliary trackless transport[J]. Coal Science and Technology,2021,49(7):118-123.
[11] 孙继平,江嬴. 矿井车辆无人驾驶关键技术研究[J]. 工矿自动化,2022,48(5):1-5,31. SUN Jiping,JIANG Ying. Research on key technologies of mine unmanned vehicle[J]. Journal of Mine Automation,2022,48(5):1-5,31.
[12] WYLIE M P, HOLTZMAN J. Non-line of sight problem in mobile location estimation[J]. Proceedinga of IEEE International Conference Personal Communication, 1996: 827-831. DOI: 10.1109/icupc.1996.562692.
[13] ROHRIG C, MULLER M. Indoor location tracking in non-line-of-sight environments using a IEEE 802.15. 4a wireless network[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, 2009: 552-557.
[14] 李静,刘琚. 用卡尔曼滤波器消除TOA中NLOS误差的三种方法[J]. 通信学报,2005(1):130-135,141. LI Jing,LIU Ju. NLOS error mitigation in TOA using Kalman filter[J]. Journal of China Institute of Communications,2005(1):130-135,141.
[15] WANN C D,HSUEH C S. Non-line of sight error mitigation in ultra-wideband ranging systems using biased Kalman filtering[J]. Journal of Signal Processing Systems,2011,64(3):389-400. DOI: 10.1007/s11265-010-0493-6
[16] BAO L L, AHMCD K, TSUJI H. Mobile location estimator with NLOS mitigation using Kalman filter[C]. IEEE Wireless Communications and Nerworking, New Orleans, 2003: 1969-1973.
[17] WANG Tiandong, CHEN Xi, GE Ning, et al. Error analysis and experimental study on indoor UWB TDOA localization with reference tag[C]. The 19th Asia-Pacific Conference on Communications, Denpasar, 2013: 505-508.
[18] WANG F Q,ZHANG X F,WANG F. Root-MUSIC-based joint TOA and DOA estimation in IR-UWB[J]. Journal on Communications,2014,35(2):137-145.
[19] 孙文,高林,魏平,等. 多普勒耦合下的声呐系统TOA多目标跟踪[J]. 信号处理,2018,34(7):757-765. SUN Wen,GAO Lin,WEI Ping. et al. Multiple target tracking for sonar system under range-doppler coupling[J]. Journal of Signal Processing,2018,34(7):757-765.
[20] 盛坤鹏,王坚. 超宽带NLOS测距误差改正模型[J]. 北京测绘,2020,34(2):250-254. SHENG Kunpeng,WANG Jian. Error correction model of ultra-wideband NLOS ranging[J]. Beijing Surveying and Mapping,2020,34(2):250-254.
[21] 温良. 基于非视距鉴别的井下精确定位技术研究[J]. 煤炭科学技术,2016,44(7):109-115. WEN Liang. Study on accurate positioning technology in underground mine based on non line of sight distinguishment[J]. Coal Science and Technology,2016,44(7):109-115.
[22] 蒙静,张钦宇,张乃通,等. IR−UWB 穿墙测距误差研究[J]. 哈尔滨工业大学学报,2011,43(11):84-88. MENG Jing,ZHANG Qinyu,ZHANG Naitong,et al. Research on IR-UWB through wall ranging error[J]. Journal of Harbin Institute of Technology,2011,43(11):84-88.
[23] 张然,宋来亮,冉龙俊. 一种基于非视距误差补偿的协同定位算法[J]. 北京航空航天大学学报,2017,43(7):1426-1432. ZHANG Ran,SONG Lailiang,RAN Longjun. A collaborative localization algorithm based on non-line-of-sight error compensation[J]. Journal of Beijing University of Aeronautics and Astronautics,2017,43(7):1426-1432.
[24] 胡建华, 陈兴同, 曹德欣. 数值计算方法[M]. 徐州: 中国矿业大学出版社, 2008. HU Jianhua, CHEN Xingtong, CAO Dexin. Numerical calculation method[M]. Xuzhou: China University of Mining and Technology Press, 2008.
-
期刊类型引用(0)
其他类型引用(2)





计量
- 文章访问数: 115
- HTML全文浏览量: 28
- PDF下载量: 22
- 被引次数: 2
