0 引言
液压支架无线控制装置采用无线手持控制器,提高了操作灵活性,尤其适合应用在活动空间狭小、推进速度较快、设备运转周期短的薄煤层、大倾角工作面,可降低操作人员来回移动的频率,从而降低劳动强度[1-2]。但无线手持控制器与各支架驱动器之间失去了原先由连接电缆建立的对应关系,给无线控制装置的通信连接带来了不确定性,不能保证相关设备可靠地按照预先设置的控制流程执行动作,存在一定安全隐患[3-6]。因此,如何使液压支架无线控制装置中的各设备进行动态关联,保证无线手持控制器仅与操作人员所在支架的驱动器进行通信连接,并使其触发闭锁动作,成为保证液压支架正常运行和人员安全的重要研究内容。本文研究了液压支架无线控制装置动态关联技术,基于红外热释电人体感应技术开发了专用的无线人体感应装置,可实时检测操作人员位置,进而实现无线手持控制器与支架驱动器的动态关联。
1 液压支架无线控制装置工作原理及关键问题
1.1 工作原理
液压支架无线控制装置由电源、隔离偶合器、支架控制单元和架间电缆组成,如图1所示。电源为双路输出,通过隔离偶合器给2组支架控制单元供电。支架控制单元安装于每台液压支架上,包括驱动器和电磁阀。无线手持控制器由操作人员随身携带。操作人员通过无线手持控制器向本架驱动器发出选架、动作等操作指令,本架驱动器将这些指令通过架间电缆传输到受控支架驱动器,进而驱动电磁阀执行支架相应动作。

a-电源;b-隔离偶合器;c-无线手持控制器;d-支架驱动器;e-电磁阀;f-架间电缆
图1 液压支架无线控制装置
Fig.1 Wireless control device for hydraulic support
1.2 关键问题
现有技术方案采用架号输入、红外照射或按钮触发等方式建立/解除设备关联,均需要人工参与,准确性和可靠性难以保证,存在安全隐患。由于无线手持控制器必须由人工操作才能工作,所以,通过对操作人员进行实时定位,即可得知无线手持控制器所在位置,进而可以实现相关设备的动态关联。工作面内支架宽度通常为1.75 m或1.5 m,现有区域定位技术精度无法满足要求[7],因此,需要一种分辨率、精度、实时性均满足要求的人员定位方法。
2 动态关联技术方案
红外辐射又称红外光,是波长为0.1~1 000 μm的不可见光。任何具有一定温度的物体都能辐射红外光。人体辐射的红外光中心波长为9~10 μm,而红外热释电传感元件的波长感应范围为0.2~20 μm,通过安装滤光片,滤掉人体红外波长以外的红外光,便可制成专门用于探测人体辐射的红外热释电传感器[8-10]。
红外热释电传感器对横向移动信号最敏感[11],因此,人体感应装置安装在每个液压支架顶梁下端,如图2所示,其中虚线为各人体感应装置的感应范围,可通过遮光罩来调节。当操作人员位于该范围内时,人体感应装置持续感应到人体信号,并以一定频率向支架驱动器发送检测信号;支架驱动器接收到该信号后,与无线手持控制器建立连接并闭锁本架驱动器,使该支架不能执行任何动作,从而保证操作人员的安全;当操作人员离开感应范围后,人体感应装置停止向驱动器发送检测信号,支架驱动器断开与无线手持控制器的连接并解除闭锁。
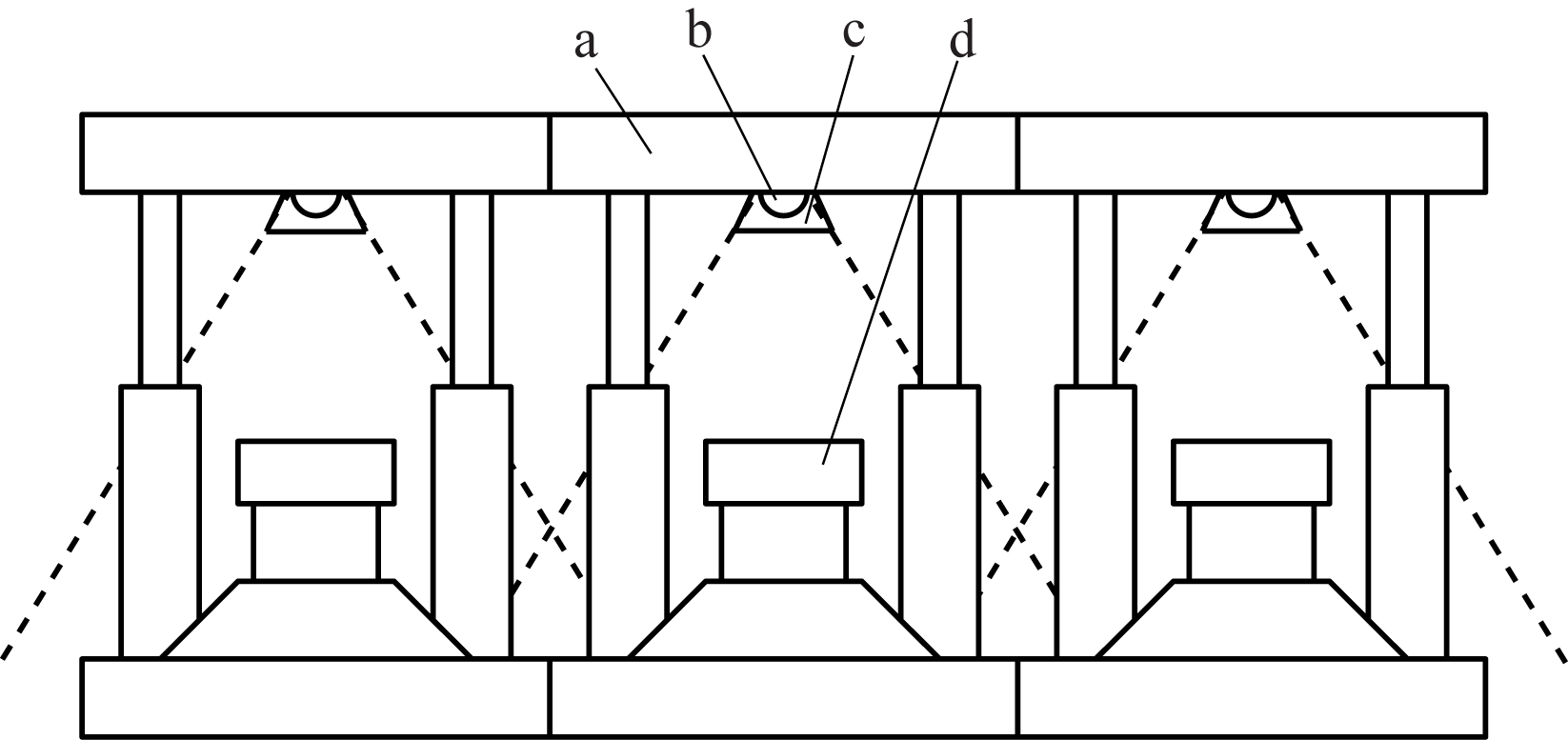
a-液压支架顶梁;b-人体感应装置;c-遮光罩;d-驱动器
图2 人体感应装置安装示意
Fig.2 Installation instructions of human body sensing device
工作面内一般有多名工作人员同时作业,人体感应装置检测到任何人员信号均可使所在支架的驱动器触发闭锁动作,与现有支架驱动器手动闭锁方式相比,提高了安全性。
3 人体感应装置设计
3.1 整体设计
人体感应装置是实现无线手持控制器与支架驱动器动态关联的关键设备,主要由电池、电源模块、微控制器、2组红外热释电传感器、2组红外热释电检测处理器、无线收发模块、指示灯等组成,如图3所示。
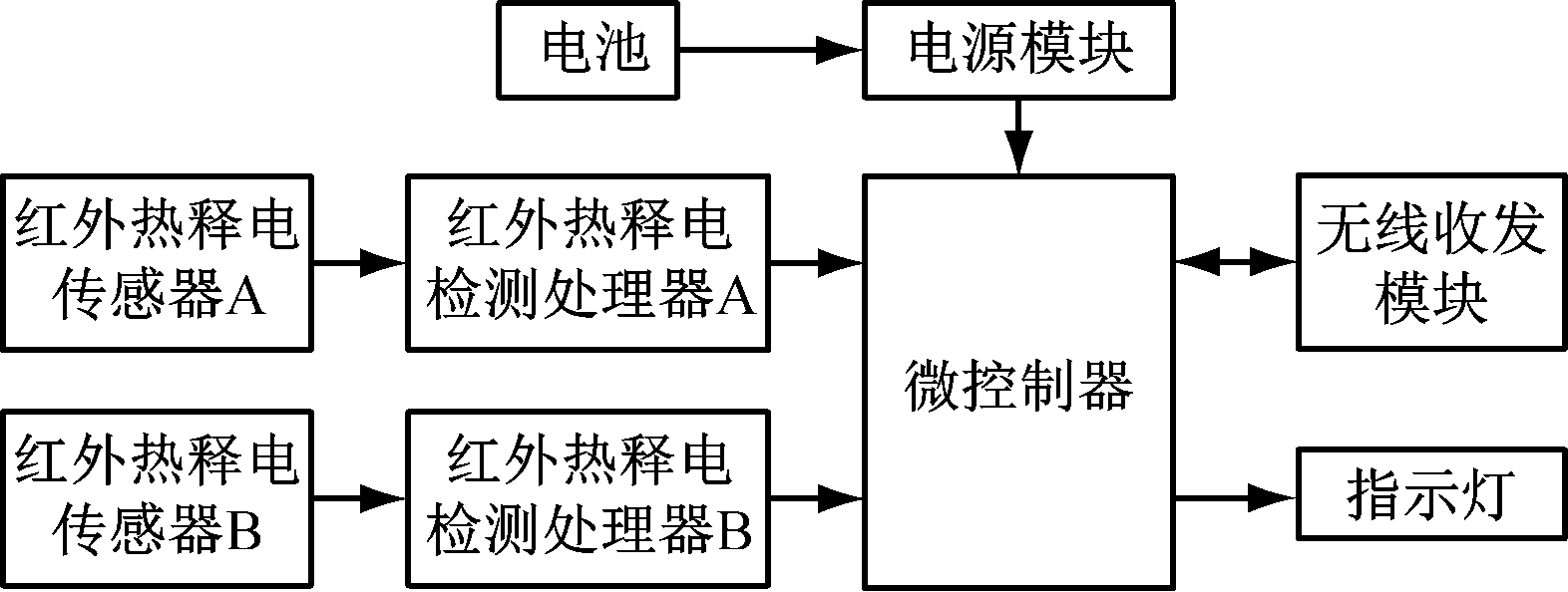
图3 人体感应装置结构
Fig.3 Structure of human body sensing device
红外热释电传感器用于检测人体红外信号。红外热释电检测处理器用于给传感器供电、检测传感器信号,以及根据寄存器设定判断是否向微控制器发送检测信号。微控制器用于配置红外热释电检测处理器、接收检测信号、通过无线收发模块与支架驱动器进行通信,以及控制指示灯动作。人体感应装置由电池通过电源模块稳压供电。
3.2 红外热释电传感器
红外热释电传感器型号为LHI968。该传感器具有响应度高和噪声低的特点,其内部结构如图4所示。传感器外壳前端有滤光片,可以使中心波长为9~10 μm的人体红外光透过,而滤掉其他波长的光线[12];其内部由2个对置的感应元组成,用以抵消噪声电平的干扰;场效应管对感应信号进行放大,阻容滤波电路可以防止射频干扰。
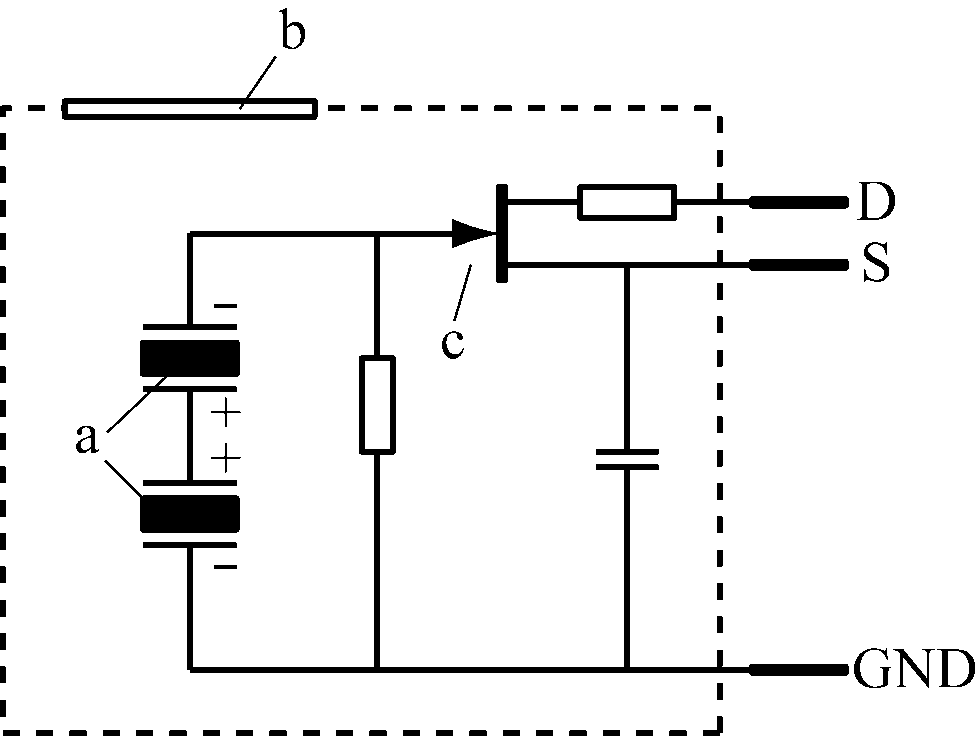
a-感应元;b-滤光片;c-场效应管
图4 红外热释电传感器结构
Fig.4 Structure of infrared pyroelectric sensor
红外热释电传感器必须与菲涅尔透镜配合使用,在传感器前端加装菲涅尔透镜,可将红外光线聚焦在传感器上,还可将检测区域分割为若干个明区和暗区,使得操作人员在检测区域内移动时能在传感器上产生变化的热释红外信号[13-14]。菲涅尔透镜型号为8240,其焦距为10 mm,检测角度为120°,检测距离为12 m,可覆盖操作人员在支架内的移动范围。
3.3 红外热释电检测处理器
红外热释电检测处理器型号为E931.96,可直接与传统的两接口红外热释电传感器通过差分输入连接,将传感器输出的信号转换为14 bit的数字量并唤醒微控制器,与模拟式处理器相比,具有更高的检测精度。该处理器中,判定信号的阈值可以通过微控制器进行配置,与模拟式处理器相比,更加精确和易于调整。此外,该处理器内部集成了一个稳压管,可以为传感器提供2.2 V的稳压电源,并可以通过配置寄存器来激活或关闭;具有内置的AD转换器和温度传感器,可以对电源电压、传感器电压及温度进行检测[15]。红外热释电检测电路如图5所示。
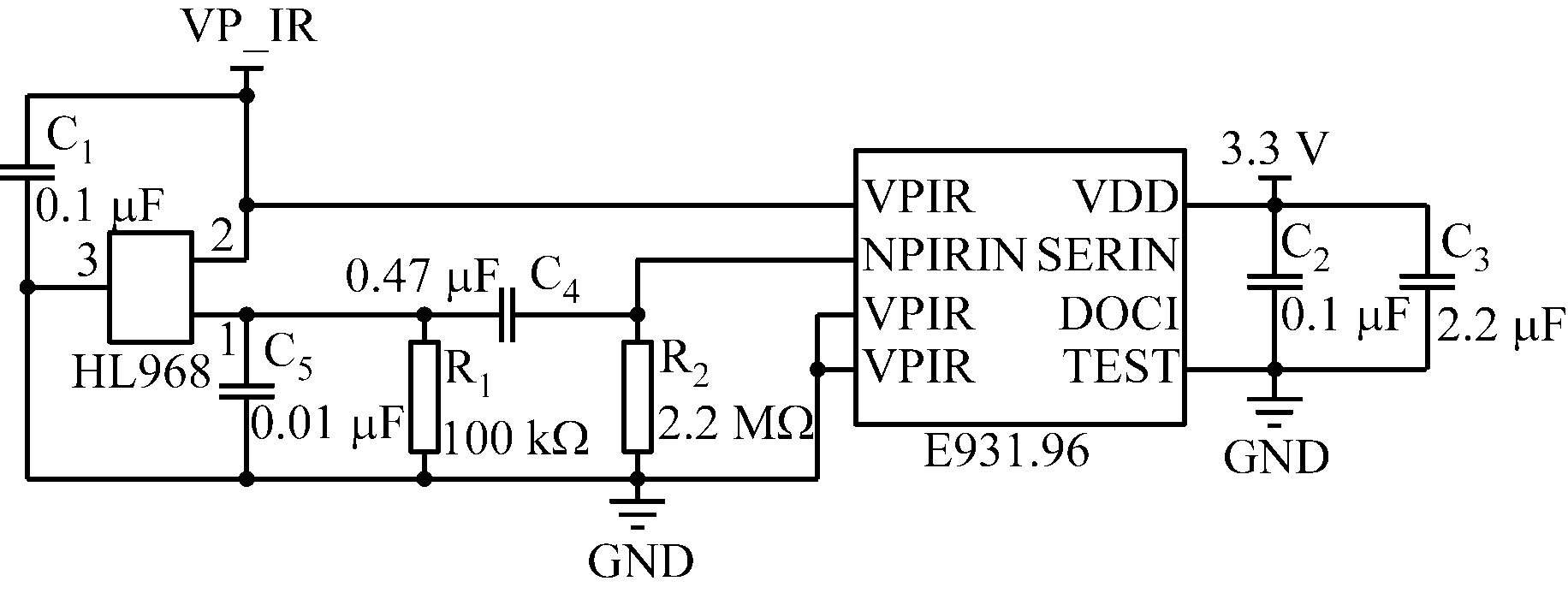
图5 红外热释电检测电路
Fig.5 Infrared pyroelectric detection circuit
4 软件策略
每台支架上的人体感应装置分别连接2个传感器,假设A1,B1为1号支架上的传感器,A2,B2为2号支架上的传感器,相邻2台支架的人体感应装置检测区域如图6所示。
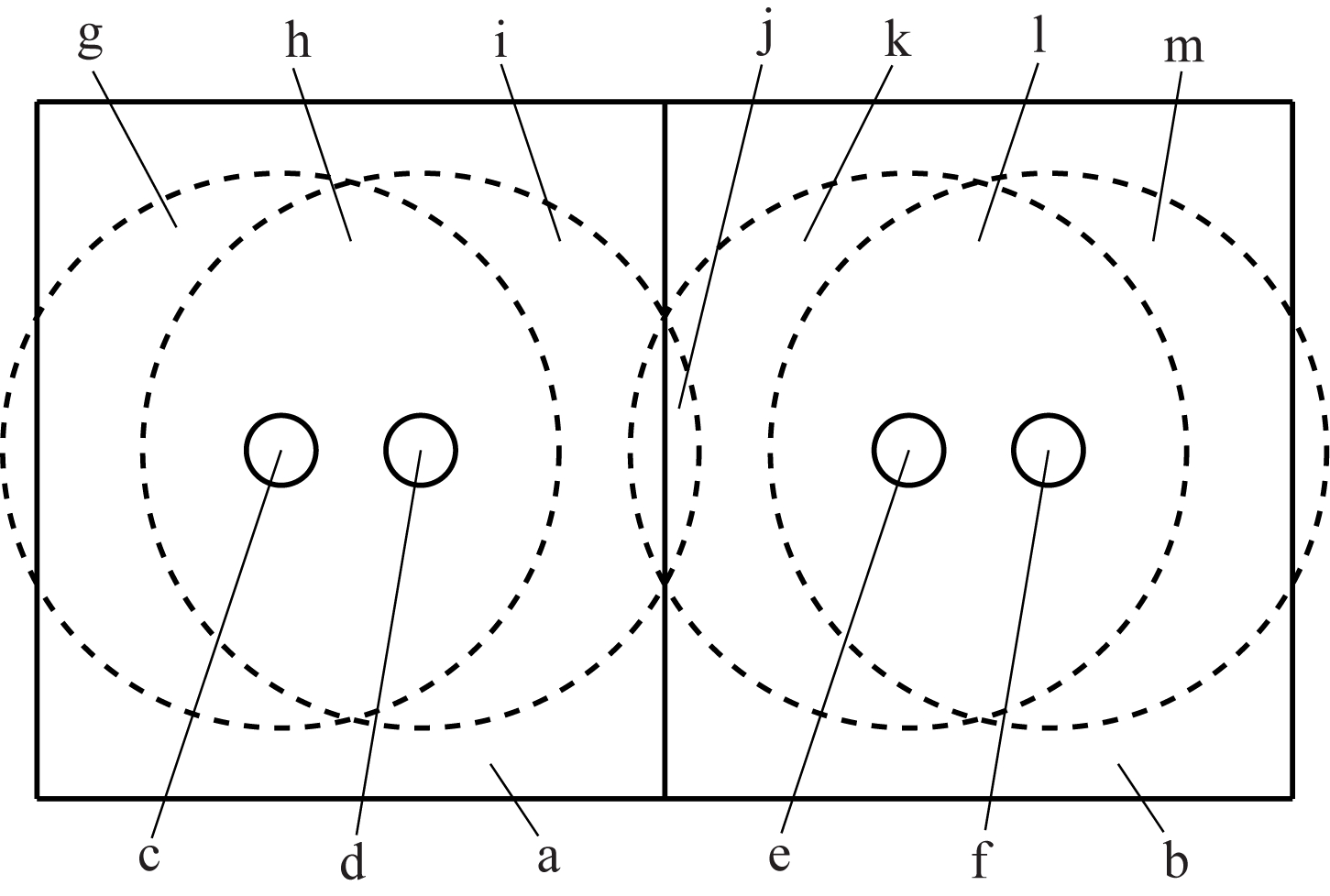
a-1号支架;b-2号支架;c-A1传感器;d-B1传感器;e-A2传感器;f-B2传感器;g-A1区域;h-A1+B1区域;i-B1;j-B1+A2区域;k-A2区域;l-A2+B2区域;m-B2区域
图6 人体感应装置检测区域
Fig.6 Detection area of human body sensing device
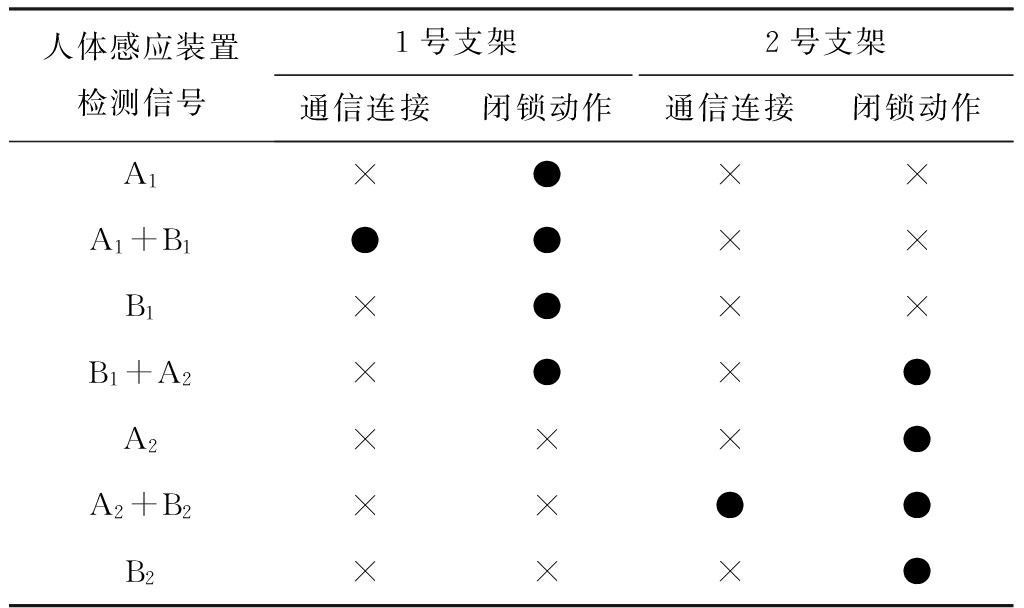
当操作人员携带无线手持控制器在工作面移动时,人体感应装置通过软件对传感器信号进行判断,以决定是否进行触发或闭锁动作。只有当人体感应装置的A、B传感器都输出检测信号时,该支架的驱动器才与无线手持控制器建立通信连接,否则不建立通信连接,或解除已建立的通信连接。而闭锁动作的触发仅需人体感应装置的任意一个传感器输出检测信号,这样既缩小了建立通信连接的范围,保证操作人员在支架内部有足够的安全区域,同时扩大了闭锁动作的触发范围,提高了安全性。图6中1号、2号支架控制单元的通信连接、闭锁动作与人体感应装置检测信号的关系见表1。表中“×”表示支架控制单元不执行该动作,“●”表示支架控制单元执行该动作。
表1 支架控制单元的通信连接、闭锁动作与人体感应装置检测信号关系
Table 1 Relationship between communication connection, lockout motion of support control unit and detection signal of human body sensing device
5 测试及分析
5.1 基本性能测试
对人体感应装置样机进行了基本性能测试,当样机电路板上的绿色指示灯点亮时说明检测到了人体信号,未检测到人体信号时绿色指示灯熄灭(图7)。将样机电路板连接至计算机,可通过串口打印测试信息,记录检测次数和响应时间。
基本性能测试结果表明,人体感应装置实际检测角度为110°,检测距离为10.6 m。国内现有薄煤层支架一般工作高度为0.6 m,中心距为1.5 m,检测角度为102.68°,现有大采高支架工作高度可达8.8 m,中心距为2.4 m,检测角度为15.53°。因此,人体感应装置可以满足薄煤层支架对检测角度的要求及大采高支架对检测距离的要求。
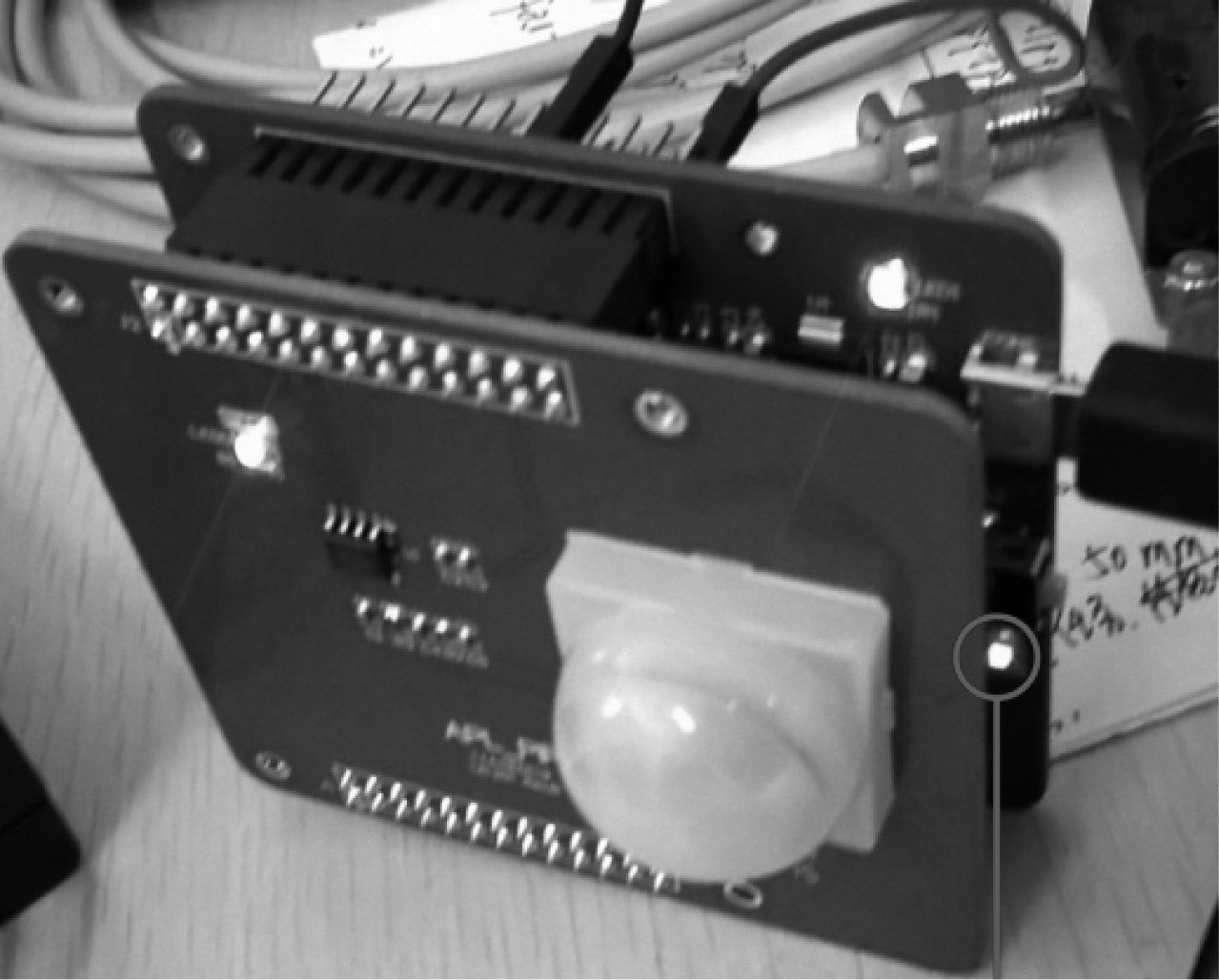
图7 人体感应装置样机
Fig.7 Prototype of human body sensing device
5.2 动态关联测试
将多台人体感应装置样机与支架控制单元对应排成一列,并按对应关系分别设置无线通信地址。测试人员携带无线手持控制器经过各控制单元时可与各驱动器动态建立通信连接,并触发闭锁动作,记录人员移动速度和各动作响应时间,进而可计算通信连接延时时间和闭锁动作延时时间。
动态关联测试结果表明,设备之间通信连接延时约为1.1 s,闭锁动作延时约为0.3 s。液压支架立柱和千斤顶的动作速度一般不超过0.2 ms,0.3 s内最多移动0.06 m,因此,动态关联的响应速度可以满足使用要求。
6 结论
(1) 利用红外热释电人体感应技术,研制了工作面人体感应装置。通过感应人体红外信号,建立或断开无线手持控制器与支架驱动器的连接,从而实现动态关联。
(2) 人体感应装置检测人体自身发出的红外光,可以避免人员主观因素的影响,并具有较好的灵敏度和可靠性。
(3) 无线手持控制器与支架驱动器根据工作人员的位置变化进行动态关联,保证了液压支架无线控制装置按照预先设置的控制流程执行动作,并自动闭锁工作人员所在支架的动作,简化了操作流程,提高了装置运行的可靠性和安全性。
参考文献(References):
[1] 王国法.“十二五”煤矿开采装备技术的发展展望[J].煤矿开采,2011,16(3):19-24.
WANG Guofa. Prospect of coal mining equipment development in 12th five-year plan of China[J]. Coal Mining Technology,2011,16(3):19-24.
[2] 赵龙,宋建成,田慕琴,等. 综采工作面液压支架集中控制系统设计[J]. 工矿自动化,2015,41(2):9-13.
ZHAO Long, SONG Jiancheng, TIAN Muqin,et al. Design of centralized control system for hydraulic supports on fully-mechanized coal mining face[J].Industry and Mine Automation, 2015,41(2):9-13.
[3] 毛德兵,蓝航,徐刚.我国薄煤层综合机械化开采技术现状及其新进展[J].煤矿开采,2011,16(3):11-14.
MAO Debing, LAN Hang, XU Gang. Thin coal-seam mechanized mining status and new development of China[J]. Coal Mining Technology,2011,16(3):11-14.
[4] 王文星,张旭,杜春玲,等. 基于薄煤层综采工作面支架控制单元的研究[J]. 中国矿业,2008,17(6):49-50.
WANG Wenxing, ZHANG Xu, DU Chunling, et al. Study on powered support control unit in thin coal seam fully mechanized working face[J]. China Mining Magazine, 2008,17(6):49-50.
[5] 郭玉辉,王赟.浅谈薄煤层开采技术现状与发展趋势[J].煤矿开采,2012,17(1):1-2.
GUO Yuhui, WANG Yun. Discussion on status and development tendency of thin coal-seam mining[J]. Coal Mining Technology, 2012,17(1):1-2.
[6] 祁和刚.薄煤层开采技术与成套装备研究及应用[J].煤炭科学技术,2014,42(9):12-16.
QI Hegang. Study and application of thin seam mining technology and complete equipment[J]. Coal Science and Technology, 2014,42(9):12-16.
[7] 赵文生.遥控型电液控制系统操作人员精确定位技术[J].工矿自动化,2015,41(4):30-32.
ZHAO Wensheng. Precise positioning technology of operator of remote-controlled electro-hydraulic control system[J]. Industry and Mine Automation,2015,41(4):30-32.
[8] 朱华,葛世荣,余小燕,等. 矿井人员红外探测计数技术研究[J]. 中国矿业大学学报,2003,32(2):165-168.
ZHU Hua, GE Shirong, YU Xiaoyan, et al. Technique feasibility of infrared detecting and counting system for miners[J]. Journal of China University of Mining & Technology,2003,32(2): 165-168.
[9] 王林泓,龚卫国,贺莉芳,等. 热释电红外信号人体运动特征识别[J]. 光电子·激光,2010,21(3):440-443.
WANG Linhong,GONG Weiguo,HE Lifang,et al. Human motion recognition using pyroelectric infrared signal[J]. Journal of Optoelectronics·Laser,2010,21(3):440-443.
[10] 吴顺伟. 面向煤矿大型机械人员安全探测系统的研究[D]. 青岛:山东科技大学,2004.
[11] 申柏华,罗晓牧,王国利. 运动检测与定位的热释电红外传感新方法[J]. 光电子·激光,2010,21(9):1350-1354.
SHEN Baihua,LUO Xiaomu,WANG Guoli. An approach for motion detecting and localization using pyroelectric infrared sensor[J].Journal of Optoelectronics·Laser, 2010,21(9):1350-1354.
[12] 刘元刚,熊刚,傅宁. 基于GSM的家庭防火防盗报警系统[J]. 机械与电子,2017,35(4):57-60.
LIU Yuangang, XIONG Gang, FU Ning. The home alarm system about fireproofing and anti-theft based on GSM[J]. Machinery & Electronics, 2017, 35(4): 57-60.
[13] 刘云飞,左臣瑞,毕鑫. 基于人体定位的智能灯光控制系统[J]. 电子质量,2017(3):60-62.
LIU Yunfei, ZUO Chenrui, BI Xin. Intelligent lighting control system based on human positioning[J]. Electronics Quality,2017(3):60-62.
[14] 崔燕琴. 基于热释电无线传感网络的人体目标识别系统[D]. 哈尔滨:哈尔滨理工大学,2014.
[15] 李林.基于单片机的野外作业移动库房安防系统设计[J].工矿自动化,2011,37(4):37-40.
LI Lin.Design of a surveillance system for fieldwork mobile warehouse based on single-chip microcomputer[J]. Industry and Mine Automation, 2011,37(4):37-40.