0 引言
矿井定位技术的研究始于20世纪90年代,当时主要采用单一功能的集成电路和分立元件,实现简单区域定位和替代打卡功能,性能不够稳定,没能得到批量应用。随着射频身份设别技术的不断成熟,2002年,山西潞安矿业(集团)有限责任公司漳村煤矿安装使用了中国第一套矿井人员监测与管理系统,定位技术由此开始在矿井得到了广泛应用。矿井定位技术的发展经历了初级的RFID区域定位到目前较高精度的精确定位阶段。本文从定位方法、通信技术等方面分析了常用的矿井定位技术及其应用情况,提出了矿井定位技术的新需求和发展趋势。
1 矿井定位技术现状
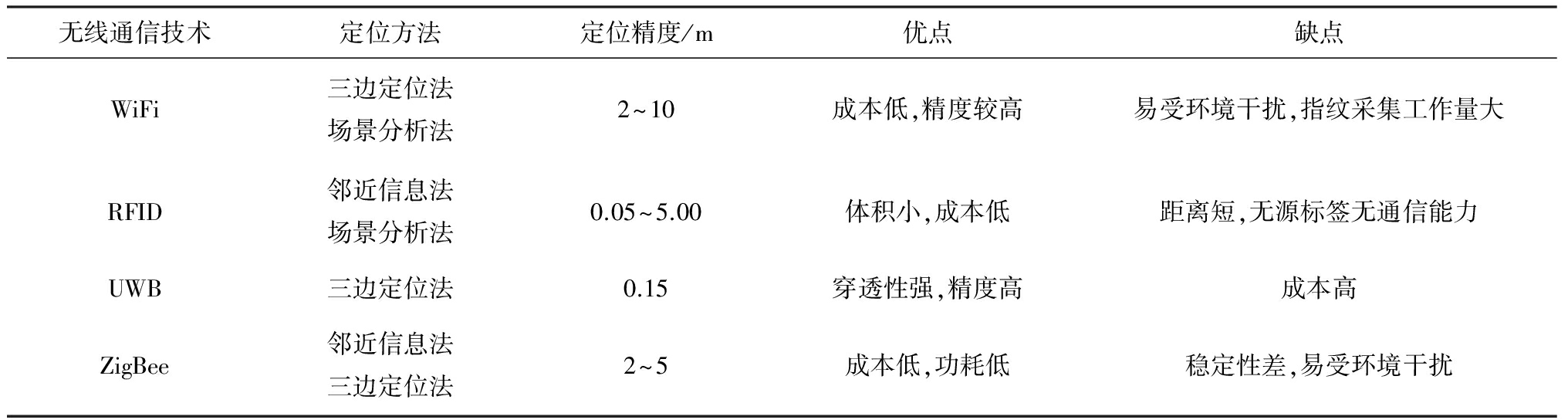
根据国内外对定位方法的研究和应用分析,定位方法可分为邻近信息法、场景分析法和几何特征法3种。其中,几何特征法是采用几何原理的定位方法,通过已知的几个点进行定位计算,目前应用最广泛。几何特征法又可分为三边定位法、三角定位法和双曲线定位法,其中三边定位法和双曲线定位法尤为常用[1]。无论何种定位方法,都离不开无线通信技术的支撑。用于矿井定位的无线通信技术主要有WiFi,RFID,UWB,ZigBee等,不同的无线通信技术适应不同的定位方法,见表1。
表1 矿井定位技术性能对比
Table 1 Performance comparison of mine positioning technologies
矿井定位系统通常由地面中心站、定位分站、天线、标志卡等部分组成。要确定被测目标的位置,首先需要测定被测目标与3个或3个以上定位分站之间的距离或与不同定位分站之间的距离差。目前常用的测距方法有2种:一种是基于检测接收信号强度指示(Received Signal Strength Indication,RSSI)的测距模式,该模式以RFID,ZigBee,WiFi等无线通信技术为支撑;另一种是基于传输到达时间(Time of Arrival,TOA)和到达时间差(Time Difference of Arrival,TDOA)的测距模式,该模式以线性调频扩频(Chirp Spread Spectrum,CSS)及UWB等无线通信技术为支撑。
1.1 矿井定位方法
1.1.1 区域定位
早期的矿井定位系统均采用区域定位方法。该方法依据定位范围的大小,在井口、井下叉道口、巷道等位置设置定位分站,以定位分站的位置为界,组成不同的区域,定位分站越多,区域面积越小,定位相对越准。系统只需知道定位分站有无收到标志卡的信号,以及什么时间收到的信号,而无需知道标志卡与定位分站的具体距离,定位方法相对简单。
1.1.2 精确定位
随着矿井定位系统的广泛应用,煤矿企业对矿井工作面人员的位置监测、特殊工种人员的轨迹再现及大型设备的接近检测提出了更高的需求,其中最关键的是对定位精度和定位实时性的要求。随着测距精度的不断提高,定位系统性能逐步稳定、可靠,精确定位成为可能。
基于TOA的测距方法得到的是定位分站和被测目标之间的直线距离,每一个TOA的测距结果对应一个圆方程;基于TDOA的测距方法得到的是2个定位分站与被测目标之间的距离差,每一个距离差的结果对应一个双曲线方程。无论是圆方程还是双曲线方程,定位测距的最终目的就是通过求解距离方程估计出被测目标的位置坐标[2]。与基于TOA,TDOA的测距方法对应的定位方法分别为三边定位法和双曲线定位法。
(1) 三边定位法。在二维平面坐标系下,设被测目标的位置坐标为P(x,y),3个已知位置的定位分站坐标分别为J1(a1,b1),J2(a2,b2),J3(a3,b3),定位分站J1,J2,J3到被测目标的距离分别为d1,d2,d3,则被测目标的位置坐标可通过下列方程组进行求解:
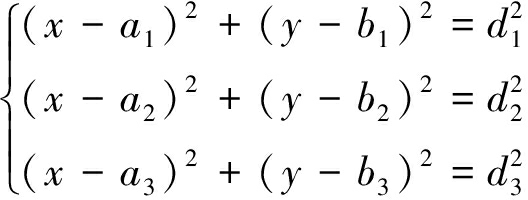
(1)
(2) 双曲线定位法[3]。在二维平面坐标系下,设被测目标的位置坐标为P(x,y),3个已知位置的定位分站坐标分别为J1(a1,b1),J2(a2,b2),J3(a3,b3),被测目标到定位分站J1的距离和被测目标到定位分站J2的距离之差为D1,被测目标到定位分站J2的距离和被测目标到定位分站J3的距离之差为D2,被测目标到定位分站J3的距离和被测目标到定位分站J1的距离之差为D3,则被测目标的位置坐标可通过下列方程组进行求解:
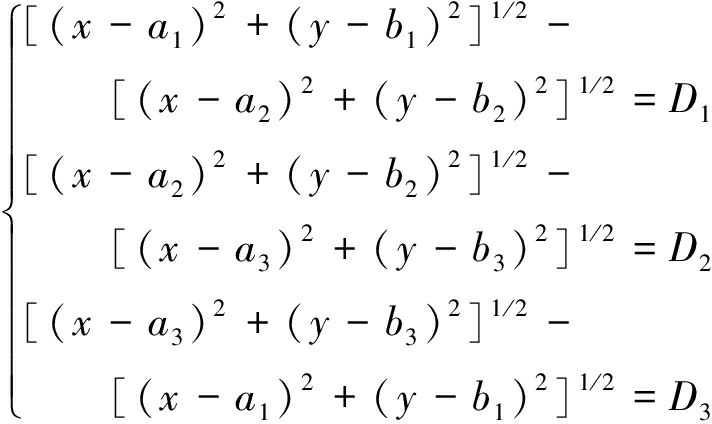
(2)
在实际应用中,受环境和测量精度的影响,被测目标和定位分站之间的距离或被测目标和2个定位分站之间的距离差无法准确测量,存在误差。因此,不管采用三边定位法还是双曲线定位法,均需要采用数学逼近的算法进行位置计算,其中最小二乘法为最常用的方法之一。在此基础上,为达到更好的定位精度,对计算结果还要作进一步优化,最常用的优化算法有Kalman滤波法和粒子滤波法。
1.2 矿井定位测距方法
1.2.1 场强分析法
RSSI定位测距方法的基本思想是在已知发射节点信号功率的情况下,测得接收节点的接收功率,通过测量接收到的信号强度来推算接收节点到发射节点的距离。接收信号强度是发射功率和传输距离的函数[4],其理论值为
SRSSI=-[10nlg(d/m)+A]
(3)
式中:n为信号传播常数;d为发射节点与接收节点之间的距离[5],m;A为距离发射节点1 m处的接收信号强度,dB·m。
由式(3)可得
d=10-(A+SRSSI)/10n
(4)
1.2.2 时间(时差)分析法
电磁波在空中的传播速度恒定,利用该定律,只要知道信号在空中的传播时间,就能计算出相应的传播距离:
D=ct
(5)
式中:c为电磁波传播速度,c=3×108m/s;t为电磁波在空中的传播时间,s。
时间(时差)分析法最典型的应用为TOA和TDOA 2种定位测距方法。其中,TOA定位测距方法直接利用信号到达时间推算被测目标和定位分站之间的距离,TDOA定位测距方法通过多个定位分站接收到信号的时间差推算被测目标和多个不同定位分站之间的距离差,从而确定被测目标位置。
另外,和时间分析法相关联的还有相位分析法。该方法根据无线电信号传播中的相位变化与传播时间呈正比的原理,通过测量2个连续信号的相位差求取时间或时间差,再依据时间信号推算出相应的距离或距离差。
1.3 矿井定位常用通信技术
越来越多的通信技术被用于动目标的位置检测,目前常用的有红外、超声波、激光、RFID、ZigBee、WiFi、UWB等通信技术。但受井下潮湿与煤尘影响,红外、超声波、激光等通信技术实际应用效果无法满足矿井应用需求,目前矿井在用主流通信技术主要是RFID,ZigBee,WiFi,UWB等。
1.3.1 RFID通信技术
RFID是一种非接触式的自动识别技术,通过射频信号自动识别目标对象并获取相关数据。一个简单的RFID系统由电子标签、阅读器、天线等部分组成。根据电子标签供电方式的不同,电子标签可分为有源电子标签和无源电子标签[6-7]。考虑矿井煤尘、空气潮湿的影响及本质安全的要求,一般采用有源电子标签。每个电子标签具有唯一的ID号,阅读器与其进行无接触的信息交换,从而获得被测目标的身份码,再加上时间信息和阅读器的位置信息,形成一个完整的信息包并传至地面中心站,经分析处理,即可实现简单的定位功能和考勤统计、轨迹再现等辅助功能。RFID通信技术应用于早期开发的人员定位系统中。
1.3.2 ZigBee通信技术
ZigBee是一组基于IEEE 802.15.4无线标准研制开发的,有关组网、安全和应用软件方面的技术标准,是基于IEEE 802.15.4标准的低功耗局域网协议。完整的ZigBee协议套件由高层应用规范、应用会聚层、网络层、数据链路层和物理层组成。网络层以上协议由ZigBee联盟制定,IEEE 802.15.4负责物理层和链路层标准。采用ZigBee通信技术的定位系统大多基于场强分析的测距方案,适用于定位精度要求不高的场合。
1.3.3 WiFi通信技术
WiFi是IEEE定义的一个无线网络通信的工业标准(IEEE 802.11x),是以太网的一种无线扩展。目前,WiFi包括IEEE 802.11a/b/g/n,主要目的是提供WLAN接入,也是目前WLAN的主要技术标准。WiFi是目前在矿井中应用较广泛的无线通信技术之一,其在人员定位方面主要用于实现区域定位和基于场强分析的精确定位,定位精度相对较低,一般为10~30 m,若辅以信号特征法(指纹法),精度可达2~10 m。
1.3.4 UWB通信技术
UWB通信技术采用无载波的通信方式,利用纳秒至微秒级的非正弦波窄脉冲传输数据。通过在较宽的频率范围上传送极低功率的无线通信信号,UWB通信技术具有抗干扰性能强、传输速率高、系统容量大、电量消耗低、发送功率小等优势[8]。基于UWB通信技术的定位系统是目前矿井定位精度最高的无线定位系统,采用基于TDOA的测距方法时定位精度可达0.15 m[9]。
2 矿井定位技术应用
当前,矿井定位技术主要应用于矿井人员定位(设备管理)系统和大型移动设备近感检测装置[10],大多采用基于RSSI,TOA和TDOA测距的定位方法。基于TOA和TDOA的定位方法简单,易于实现,且精度较高,但对时间准确性要求严格,对硬件要求较高;基于RSSI的定位方法无需额外的传感器设备,成本较低,但受环境影响较大,定位精度相对较低。
2.1 矿井人员定位系统
矿井人员定位系统可实现以下功能:① 标志卡管理功能。在标志卡内写入井下人员姓名、工号、年龄、班组等信息,在地面中心站数据库中录入标志卡编码及员工、设备的对应信息,确保井下人员、设备具有唯一的标志码,便于统一管理。② 定位信息应用功能。可提供井下人员和设备的轨迹、人员考勤等信息,其结果可以图形和报表的形式存档。③ 定位显示功能。通过定位方法确定并实时显示井下人员和设备的位置,跟踪目标路径。④ 救援辅助决策功能。可依据定位数据和来自其他监测系统的环境数据进行分析决策,为遇险者提供最佳撤离路线[11]。
2.2 大型移动设备近感检测装置
近年来,矿井定位技术逐步应用于人员、车辆的接近检测,以防止意外碰撞事故的发生。中国已研制推出了首套实现井下人员接近双向报警和设备自动停机的矿用近感探测装置。该装置将设备附近设置为安全区、操作区、告警区和危险区。安全区是远离设备的区域,当人员处于安全区时,设备正常运行;操作区为驾驶人员所在区域,当人员处于操作区时,设备正常运行;告警区离设备相对较近,当人员进入告警区时,发出双向预警;危险区离设备最近,当人员进入危险区时,设备自动停机,以保障人身安全[12]。该装置可应用于矿井各类作业装备,如连续采煤机、梭车、锚杆机、掘进机、支架搬运车等大型移动设备。
3 矿井定位技术发展趋势
煤矿企业要实现“机械化换人、自动化减人”的目标,关键是要减少人员对设备的操控和干预,使相关设备自动作业,因此,设备的自主导航显得尤为关键,相应地对矿井定位系统的定位精度、适用场合、服务方式提出了更高的要求:① 高性能。更高的精度、更快的反应速度,多维度、大容量、广覆盖。② 新方式。信息利用由集中式到分布式和集中式共存;信息方式由一维到二维、三维;多环境无缝衔接;服务平台开放、共享。
单一的定位技术将无法满足井下复杂应用的需求。未来的矿井定位系统或装备将会综合利用无线超高频测距、惯性导航、多源混合定位与多源信息融合等技术,组成一个面向服务的定位服务系统,实现井下人员和设备的精确定位、大型移动设备人员接近检测、采掘装备与井下搜救人员(机器人)自主导航与定位等服务。
4 结语
目前,矿井定位技术和室内定位技术基本同步,基本满足矿井人员定位和设备近感检测的需求。受井下环境条件的影响,地面相对成熟的基于图像分析、磁场分析、压力感应及光跟踪等的定位技术在煤矿井下的应用还没有展开,需要进一步研究;行为感知、目标识别及即时定位与地图构建等新功能也将逐步研究并实现。
参考文献(References):
[1] RAHMAN R M,BARKER K,ALHAJJ R.Replica placement in data grid: considering utility and risk[C]//Proceedings of IEEE International Conference on Information Technology: Coding and Computing,Las Vegas,2005:354-359.
[2] 陈方晓.基于异步TOA估计的超宽带室内定位系统的研究与实现[D].深圳:哈尔滨工业大学(深圳),2012.
[3] 殷桂华,王小辉,雷毅谈.基于TDOA的室内运动目标双曲线RFID定位方法[J].计算机应用,2014,34(增刊2):52-54.
YIN Guihua,WANG Xiaohui,LEI Yitan.RFID hyperbolic positioning using TDOA method for indoor moving target[J].Journal of Computer Applications,2014,34(S2):52-54.
[4] 王同泉,崔建民.基于Zigbee的井下人员定位监测系统的设计与研究[J].电气技术,2012(4):17-20.
WANG Tongquan,CUI Jianmin.Designing and research of under mine personnel positioning and monitoring system based on Zigbee[J].Electrical Engineering,2012(4):17-20.
[5] 刘洋,杨洁明.基于 CC2431的井下人员定位方法研究[J].煤矿机械,2010,31(6):49-51.
LIU Yang,YANG Jieming.Study on positioning method for underpit operators based on CC2431[J].Coal Mine Machinery,2010,31(6):49-51.
[6] 朱煜钰,王增胜.基于物联网RFID的人员定位研究[J].科技资讯,2010(22):19-20.
[7] 顾煊.基于RFID的定位跟踪管理技术研究与开发[D].上海:上海交通大学,2007.
[8] 祖军,郝润科,杨光.UWB技术在消防员位置定位系统研究与应用[J].计算机系统应用,2012,21(8):156-159.
ZU Jun,HAO Runke,YANG Guang.System research and application based on UWB technology in fire location[J].Computer Systems & Applications,2012,21(8):156-159.
[9] 肖竹,王勇超,田斌,等.超宽带定位研究与应用:回顾和展望[J].电子学报,2011,39(1):133-141.
XIAO Zhu,WANG Yongchao,TIAN Bin,et al.Development and prospect of ultra-wideband localization research and application[J].Acta Electronica Sinica,2011,39(1):133-141.
[10] 包建军,霍振龙,徐炜,等.一种高精度井下人员无线定位方法[J].工矿自动化,2009,35(10):18-21.
BAO Jianjun,HUO Zhenlong,XU Wei,et al.A wireless location method with high precision for underground personnel tracking[J].Industry and Mine Automation,2009,35(10):18-21.
[11] 孙恩吉,李仲学,李翠平.基于RFID及WSN技术的矿山实时三维定位及灾害预警平台[J].中国安全生产科学技术,2009,5(3):36-40.
SUN Enji,LI Zhongxue,LI Cuiping.The real-time 3D localization and hazard warning platform based on the RFID and WSN in underground mine[J].Journal of Safety Science and Technology,2009,5(3):36-40.
[12] 包建军.煤矿井下装备接近探测方法研究[J].工矿自动化,2017,43(1):1-4.
BAO Jianjun.Research on proximity detection method for machines in coal mine[J].Industry and Mine Automation,2017,43(1):1-4.