
图1 垂直救援车载提升系统动力学模型
Fig.1 Dynamics model of vertical rescue vehicle-mounted hoisting system
实验研究
曾跃翔1,2, 杨兆建1,2, 王淑平1,2, 谢嘉成1,2, 温毅1,2
(1.太原理工大学 机械工程学院, 山西 太原 030024; 2.煤矿综采装备山西省重点实验室, 山西 太原 030024)
摘要:介绍了垂直救援车载提升系统组成及工作原理;采用UG建立了垂直救援车载提升系统三维模型,并将三维模型导入ADAMS中构建了系统动力学模型;利用动力学模型模拟了系统在救援舱空载下放、救援舱重载提升、救援舱紧急制动、钢丝绳过放等典型工况下钢丝绳受力及救援舱与地面的碰撞力情况,为系统设备选型和设计提供了理论依据。
关键词:紧急救援; 垂直救援; 车载提升系统; 动力学; 钢丝绳; 救援舱
受地质条件、开采技术和设备、人为因素等影响,矿难事故时有发生[1]。近年来,地面快速垂直钻进救援技术快速发展[2-3],可为被困人员提供通风、给养、通信等,有效保证被困人员生命安全,如2010年智利矿难[4-5]、2015年中国山东平邑石膏矿难[6-7]救援过程中均使用地面快速垂直钻进救援技术并取得了成功。垂直救援车载提升系统以地面快速垂直钻进救援技术为依托[8-10],其优点在于发生矿难后,救援设备可随车赶往事故地点,省去设备装车、拆卸、安装等过程,避免救援现场地形因素对设备放置的影响[11],可极大减少救援前期准备工作,节省抢险救援时间,提高救援成功率。
垂直救援车载提升系统主要通过钢丝绳下放救援舱进行提人救援[12-14],钢丝绳和救援舱对系统安全性起着非常重要的作用。本文建立了垂直救援车载提升系统动力学模型,利用动力学模型模拟了系统在典型工况下钢丝绳受力和救援舱着地时与地面的碰撞力,可为系统中钢丝绳和救援舱底部缓冲器的选型提供依据。
垂直救援车载提升系统主要由车载平台、电动机、减速器、卷筒、钢丝绳、液压站、井架、电控台、救援舱等组成。系统工作原理与矿井提升机类似,卷筒主要负责缠绕钢丝绳,钢丝绳通过井架上的天轮与救援舱连接,通过电动机控制卷筒转向,达到提升或下放救援舱的目的。救援过程中有4种典型工况:救援舱空载下放、救援舱重载提升、救援舱紧急制动、钢丝绳过放。
利用UG8.0软件建立垂直救援车载提升系统三维模型。由于系统结构复杂、设备繁多,建模时可省略一些对模型整体结构、仿真过程影响很小的部件,如非关键部位的螺栓、螺母等,这样可提高仿真效率。在建模过程中,先创建单个部件模型,再根据系统构成进行装配。
将UG中建立的三维模型保存为Parasolid格式后导入ADAMS中。ADAMS中的Cable模块有离散型和简化型[15],由于钢丝绳较长,所以选取简化型钢丝绳模型。设置滑轮个数为2,根据现场情况将其中一个滑轮固定在天轮位置,另一个滑轮固定在卷筒主轴上,这样可仿真钢丝绳缠绕卷筒的运动。钢丝绳的一个锚点连接在救援舱上部,另一个锚点连接在滑轮上。救援舱和救援舱底部缓冲器材料的准确性对仿真结果影响较大,应确保救援舱和缓冲器材料与实际基本相符,因此在ADAMS中将救援舱材料设置为钢,将缓冲器材料设置为接近聚氨酯的glass-fiber-plastic。同时设置救援舱中人员质量为100 kg,救援舱质量为500 kg。为准确仿真救援舱着地情况,将缓冲器与地面的接触类型定义为contact接触。在卷筒上建立旋转副,被救人员与救援舱建立固定副,其余部件与地面建立固定副。为卷筒的旋转副添加驱动,根据不同工况,编写不同的驱动函数,驱动函数类型为STEP函数。垂直救援车载提升系统动力学模型如图1所示。
图1 垂直救援车载提升系统动力学模型
Fig.1 Dynamics model of vertical rescue vehicle-mounted hoisting system
救援舱空载下放过程主要分为5个阶段:① 以0.25 m/s匀速下降;② 匀加速至2 m/s;③ 匀速运动;④ 匀减速至0.25 m/s;⑤ 救援舱着地停止。仿真时设置救援舱下放速度如图2所示,在该速度下钢丝绳受力、救援舱与地面碰撞力仿真结果分别如图3、图4所示。从图3可看出,在仿真过程中钢丝绳受力总体较稳定,波动幅度较小,表明救援舱下放过程较平稳,且钢丝绳最大受力约为5 kN。从图4可看出,救援舱底部与地面接触时,救援舱底部与地面碰撞力突然增大至7.1 kN。

图2 救援舱下放速度
Fig.2 Lowering speed of rescue capsule
救援舱重载提升过程同样分为5个阶段:① 以0.25 m/s匀速上升;② 匀加速至2 m/s;③ 匀速运动;④ 匀减速至0.25 m/s;⑤ 救援舱出井口后停止。仿真时设置救援舱提升速度如图5所示,在该速度下钢丝绳受力仿真结果如图6所示。从图6可看出,在仿真开始时,钢丝绳受到一个较小的力,这是因为救援舱底部与地面接触产生形变,导致钢丝绳受力;随后钢丝绳受力增大且趋于稳定,钢丝绳最大受力约为6.1 kN。

图3 救援舱下放过程钢丝绳受力
Fig.3 Wire rope tension during lowering of rescue capsule

图4 救援舱与地面碰撞力
Fig.4 Collision force between rescue capsule and ground
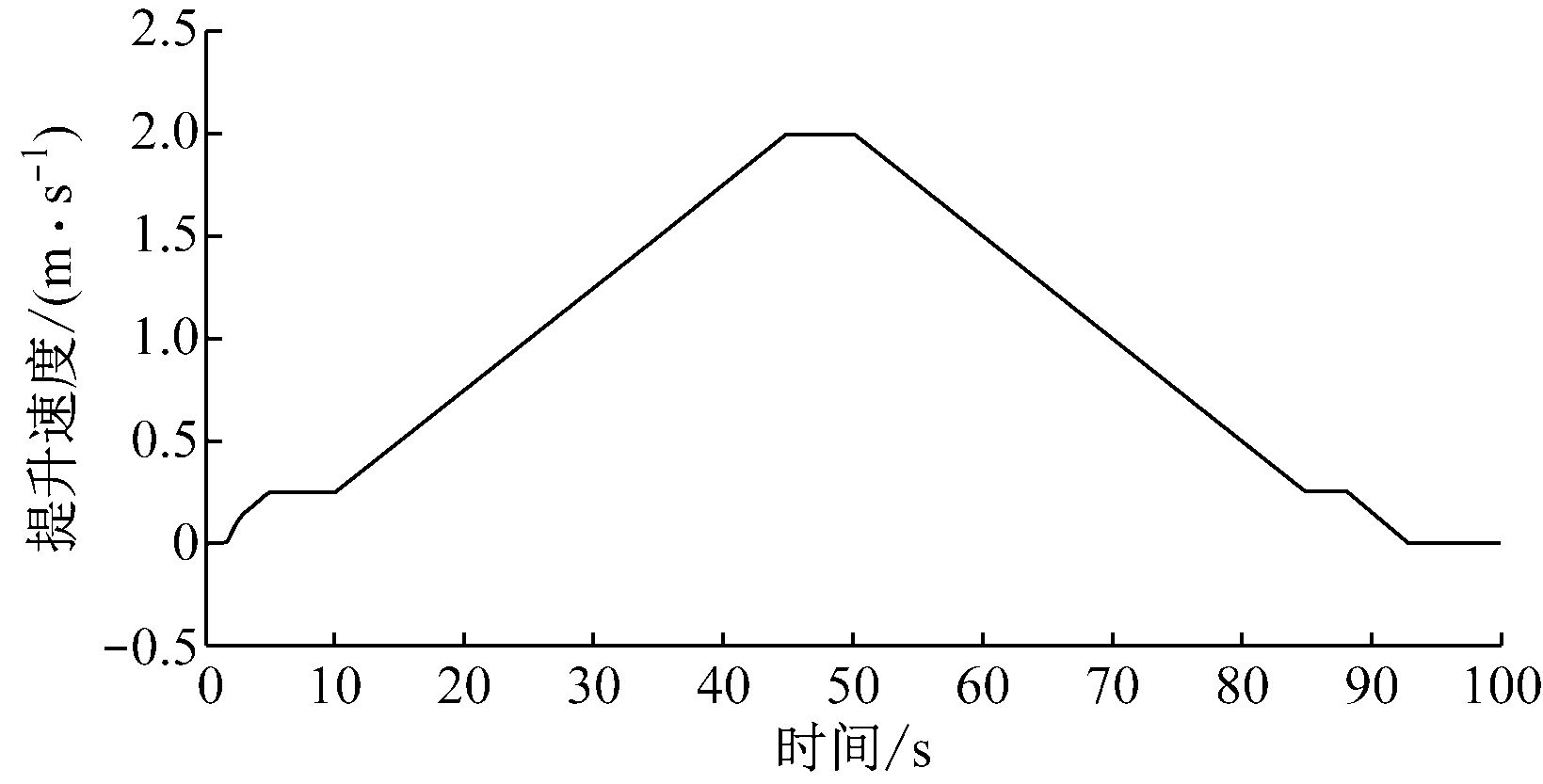
图5 救援舱提升速度
Fig.5 Lifting speed of rescue capsule

图6 救援舱提升过程钢丝绳受力
Fig.6 Wire rope tension during lifting of rescue capsule
设置50 s时救援舱在提升、下放过程中以2 m/s的最大速度运行时进行紧急制动,制动时间为0.5 s,此时钢丝绳受力仿真结果分别如图7、图8所示。可看出救援舱在下放过程中紧急制动时钢丝绳受力最大,达7.25 kN。为保证钢丝绳在救援中的安全性,在钢丝绳选型时,应考虑钢丝绳最小破断拉力,使其满足使用要求。根据《煤矿安全规程》规定,单绳缠绕式提升设备专为升降人员用的钢丝绳安全系数不得小于9,因此应选择最小破断拉力大于65 kN的钢丝绳。

图7 救援舱提升过程中紧急制动时钢丝绳受力
Fig.7 Wire rope tension when emergency braking during lifting of rescue capsule

图8 救援舱下放过程中紧急制动时钢丝绳受力
Fig.8 Wire rope tension when emergency braking during lowering of rescue capsule
在钻井深度未知的特殊情况下,试运行阶段救援舱可能以最大速度着地,此时救援舱与地面碰撞力仿真结果如图9所示,可看出最大碰撞力约为47 kN。由于该碰撞力极大,为避免造成救援舱及其内部设备损坏,在缓冲器选型时,应选择缓冲力大于47 kN的缓冲器。

图9 救援舱以最大速度着地时与地面碰撞力
Fig.9 Collision force between rescue capsule and ground when rescue capsule touches ground with the maximum speed
利用ADAMS仿真软件对垂直救援车载提升系统进行了动力学建模,仿真分析了救援舱空载下放、救援舱重载提升、救援舱紧急制动、钢丝绳过放等不同工况下钢丝绳受力及救援舱与地面的碰撞力情况,仿真结果为系统中钢丝绳和救援舱底部缓冲器的选型提供了参考。
参考文献(References):
[1] 袁亮.我国深部煤与瓦斯共采战略思考[J].煤炭学报,2016,41(1):1-6.
YUAN Liang.Strategic thinking of simultaneous exploitation of coal and gas in deep mining[J].Journal of China Coal Society,2016,41(1):1-6.
[2] 宋元明,刘志军,王万生.快速钻孔技术在煤矿应急救援中的实践[J].中国安全科学学报,2004,14(6):63-65.
SONG Yuanming,LIU Zhijun,WANG Wansheng.Practice of quick drill in coal mine emergency rescue[J].China Safety Science Journal,2004,14(6):63-65.
[3] 浦静怡,吕春玲,贺晓强,等.煤矿事故垂直救援研究进展[C]//段中会.煤矿隐蔽致灾因素及探查技术研究:陕西省煤炭学会学术年会论文集(2014).北京:煤炭工业出版社,2015:4.
[4] 张敏江,郭忠林,张秉皓.从智利矿难营救探讨我国地下矿山安全事故管理建设[J].有色金属(矿山部分),2011,63(1):68-70.
ZHANG Minjiang,GUO Zhonglin,ZHANG Binghao.Discussion on the safety management construction of underground mining in China through the CHILE mining accident rescue[J].Nonferrous Metals(Mine Section),2011,63(1):68-70.
[5] 谢来,张乐.智利矿工大营救[J].劳动保护,2010(11):108-110.
XIE Lai,ZHANG Le.Chilean miners rescue[J].Labour Protection,2010(11):108-110.
[6] 宋钢锁.某垮塌矿区大直径救援钻孔旋挖钻进施工技术[J].地质装备,2016,17(3):40-43.
SONG Gangsuo.Construction technique of large diameter rescue drilling and rotary drilling in a collapsed mining area[J].Equipment for Geotechnical Engineering,2016,17(3):40-43.
[7] 高广伟,张禄华.大直径钻孔救援的实践与思考——以山东平邑“12·25”石膏矿坍塌事故救援为例[J].中国应急管理,2016(3):74-75.
GAO Guangwei,ZHANG Luhua.Practice and thinking of large diameter borehole rescue: taking the "12.25" gypsum mine collapse accident rescue in Shandong Pingyi as an example[J].China Emergency Management,2016(3):74-75.
[8] 王亮.车载稳定平台结构设计及其动态特性分析[D].成都:西华大学,2013.
[9] 陈美芳,王虎,徐非骏.一种车载稳定平台系统设计[J].机械与电子,2015(3):14-16.
CHEN Meifang,WANG Hu,XU Feijun.System design of a vehicle-borne stabilized platform[J].Machinery & Electronics,2015(3):14-16.
[10] 周广庆,鞠雪梅.车载式提升机工艺技术应用研究[J].科技创新导报,2012,9(3):93.
ZHOU Guangqing,JU Xuemei.Application research on process technology of vehicle mounted hoist[J].Science and Technology Innovation Herald,2012,9(3):93.
[11] 赤文林.矿井垂直救援绳缆提升系统的研究[D].太原:太原理工大学,2015.
[12] 王超,樊林玉,黄志凌,等.矿井应急救援舱研究[J].黑龙江科技信息,2014(32):51.
WANG Chao,FAN Linyu,HUANG Zhiling,et al.Study on mine emergency rescue module[J].Heilongjiang Science and Technology Information,2014(32):51.
[13] 樊林玉,金龙哲,黄志凌,等.矿井应急救援舱噪声试验研究[J].煤炭技术,2016,35(3):210-212.
FAN Linyu,JIN Longzhe,HUANG Zhiling,et al.Experimental study on noise of mine emergency rescue capsule[J].Coal Technology,2016,35(3):210-212.
[14] 王志坚.矿山钻孔救援技术的研究与务实思考[J].中国安全生产科学技术,2011,7(1):5-9.
WANG Zhijian.Considering and researching of drilling technology in mine rescue[J].Journal of Safety Science and Technology,2011,7(1):5-9.
[15] 张营章,张顺心,崔少杰,等.基于ADAMS/Cable的起重机钢丝绳的仿真分析[J].制造业自动化,2013,35(13):10-12.
ZHANG Yingzhang,ZHANG Shunxin,CUI Shaojie,et al.Simulation analysis for the wire rope of the crane based on ADAMS/Cable[J].Manufacturing Automation,2013,35(13):10-12.
ZENG Yuexiang1,2, YANG Zhaojian1,2, WANG Shuping1,2, XIE Jiacheng1,2, WEN Yi1,2
(1.College of Mechanical Engineering, Taiyuan University of Technology, Taiyuan 030024, China; 2.Shanxi Key Laboratory of Fully Mechanized Coal Mining Equipment, Taiyuan 030024, China)
Abstract:Composition and working principle of vertical rescue vehicle-mounted hoisting system were introduced. A 3D model of the system was built by use of UG, which was introduced into ADAMS to build dynamics model of the system. Wire rope tension and collision force between rescue capsule and ground of the system under typical working conditions such as no-load lowering of rescue capsule, heavy-load lifting of rescue capsule, emergency braking of rescue capsule and over lowering of wire rope were simulated, which provide theoretical basis for selection and design of the system.
Key words:emergent rescue; vertical rescue; vehicle-mounted hoisting system; dynamics; wire rope; rescue capsule
文章编号:1671-251X(2017)12-0044-04
DOI:10.13272/j.issn.1671-251x.2017.12.009
中图分类号:TD774/401
文献标志码:A 网络出版时间:2017-12-06 14:17
网络出版地址:http://kns.cnki.net/kcms/detail/32.1627.TP.20171205.1749.016.html
收稿日期:2017-07-11;
修回日期:2017-10-24;责任编辑盛男。
基金项目:山西省科技重大专项项目(20111101040);2016年度山西省重点研发计划项目(2016030321114)。
作者简介:曾跃翔(1989-),男,山西原平人,硕士研究生,研究方向为机械结构与系统动力学,E-mail:315674278@qq.com。通信作者:杨兆建(1955-),男,河北保定人,教授,博士,研究方向为机械结构与系统动力学、基于网络的现代设计、机械产品的虚拟现实设计,E-mail:yangzhaojian@tyut.edu.cn。
引用格式:曾跃翔,杨兆建,王淑平,等.典型工况下垂直救援车载提升系统动力学分析[J].工矿自动化,2017,43(12):44-47.
ZENG Yuexiang,YANG Zhaojian,WANG Shuping,et al.Dynamics analysis of vertical rescue vehicle-mounted hoisting system under typical working conditions[J].Industry and Mine Automation,2017,43(12):44-47.