杨枭1, 厉彦江1, 郭单2
(1.北京矿冶研究总院, 北京 100160;2.东北大学 流程工业综合自动化国家重点实验室, 辽宁 沈阳 110004)
摘要:针对矿山电力牵引系统的发热问题,提出一种矿山电力牵引系统主动热均衡控制方法,即通过实时反馈系统的温度信号,完成对电动机定子电流幅值、驱动系统开关频率等参数的在线自调节;提出一种基于温度反馈的d,q轴电流矢量优化计算方法,使系统运行于全局效率最大的工作特性曲线;基于15 kW永磁同步电动机调速系统实验平台对矿山电力牵引系统主动热均衡控制方法进行了可行性验证。实验结果表明,该方法可在保证矿山电力牵引系统动态、稳态性能的同时,降低系统的热点峰值。
关键词:矿山电力牵引系统; 主动热均衡控制; 永磁同步电动机; 驱动系统; 效率优化
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160429.1127.012.html
矿山电力牵引系统在矿山生产运输中必不可少,一般由体积小、重量轻、效率高的永磁同步电动机及其驱动系统组成。随着矿山电力牵引系统电磁转矩持续增长,功率密度日益增大,发热问题也逐渐显现出来,不利于系统可靠运行。
矿山电力牵引系统的发热来自电动机损耗和驱动系统损耗。电动机损耗主要包括铜损、铁损、机械损耗等[1]。驱动系统损耗主要为IGBT开关损耗。目前矿山电力牵引系统一般采用最大转矩电流比(Maximum Torque Per Ampere, MTPA)方法[2-4],使电动机在输出相同电磁转矩的条件下定子电流最小,从而减小电动机和驱动系统损耗[5]。但该方法未将温度信号引入控制回路,且没有考虑驱动系统开关频率对发热的影响,系统损耗降低程度有限。
本文提出一种矿山电力牵引系统主动热均衡控制方法(Active Thermal Balance Method, ATBM)。该方法在MTPA方法基础上,通过实时反馈矿山电力牵引系统的温度信号,完成对电动机定子电流幅值、驱动系统开关频率等参数的在线自调节,并基于温度信号优化电动机d,q轴电流矢量计算方法,使系统运行于全局效率最大的工作特性曲线。基于15 kW永磁同步电动机调速系统实验平台验证了该方法的可行性,结果表明该方法可在保证矿山电力牵引系统动态、稳态性能基础上,降低系统的热点峰值。
图1为以永磁同步电动机为牵引电动机的矿山电力牵引系统调速原理。其中Udc为电源电压,ua,ub,uc为驱动系统输出的相电压,Si为IGBT功率开关(i=1,2,…,6),ui为电压空间矢量。将静止αβ坐标系转换成旋转dq坐标系,dq坐标系下的电压、转矩方程为
(1)
(2)
(3)
(4)
式中:vd,vq分别为电动机定子d,q轴电压;id,iq分别为电动机定子d,q轴电流;Ld,Lq分别为电动机定子d,q轴电感;R为定子电阻;ωm为电角速度;Te为电动机电磁转矩;p为电动机极对数;Ψm为永磁体的励磁磁链;TL为负载转矩;Bm为电动机摩擦因数;J为电动机负载转动惯量。

图1 矿山电力牵引系统调速原理
将id,iq用定子电流幅值Im和电流角度δ表示:
(5)
将式(5)代入式(3),得到定子电流幅值Im与电磁转矩Te和电流角度δ的关系。在电磁转矩Te一定的条件下,定子电流幅值Im仅与电流角度δ有关。因此,用定子电流幅值Im对电流角度δ求导,可得MTPA控制条件:
(6)
化简式(6)得
(7)
因此对于永磁同步电动机,在求得最优电流角度后,可实现电磁转矩一定的情况下定子电流最小[6]。
对于矿山电力牵引系统,其驱动系统的核心组件为大功率IGBT。图2为IGBT散热模型。IGBT发热主要由开关损耗引起,热量经芯片、外壳(包含焊料、铜层和陶瓷压制成的陶瓷金属复合板及基板)传递到散热器,再通过散热器传递到周围环境。其热特性可用三阶RC热阻抗等效模型表示[7]:
Zthjc,T=Rthjc[1-exp(-t/τ1)]+Rthch[1-
exp(-t/τ2)]+Rthha[1-exp(-t/τ3)]
(8)
式中:Zthjc,T为从结温Twj到环境温度Ta的热阻抗;τ1,τ3,τ3分别为芯片层、外壳层和散热器层的时间常数。

图2 IGBT散热模型
针对IGBT的RC热阻抗等效模型,本文采用常见的稳态热阻等效电路[8]计算IGBT散热系统的温度,如图3所示。其中PT,PD分别为芯片内晶体管、二极管的开关损耗;Tj,T,Tj,D分别为芯片内晶体管、二极管的温度;Rthjc,T,Rthjc,D分别为芯片内晶体管、二极管到外壳的热阻,Rthjc,T+Rthjc,D=Rthjc;Rthca为外壳到环境的热阻。由于Rthca值远大于Rthch和Rthha,所以Rthca与Rthch,Rthha并联时可忽略不计。将IGBT的开关损耗等效为电流源,将热阻等效为电阻,将热阻上产生的温差等效为电压。
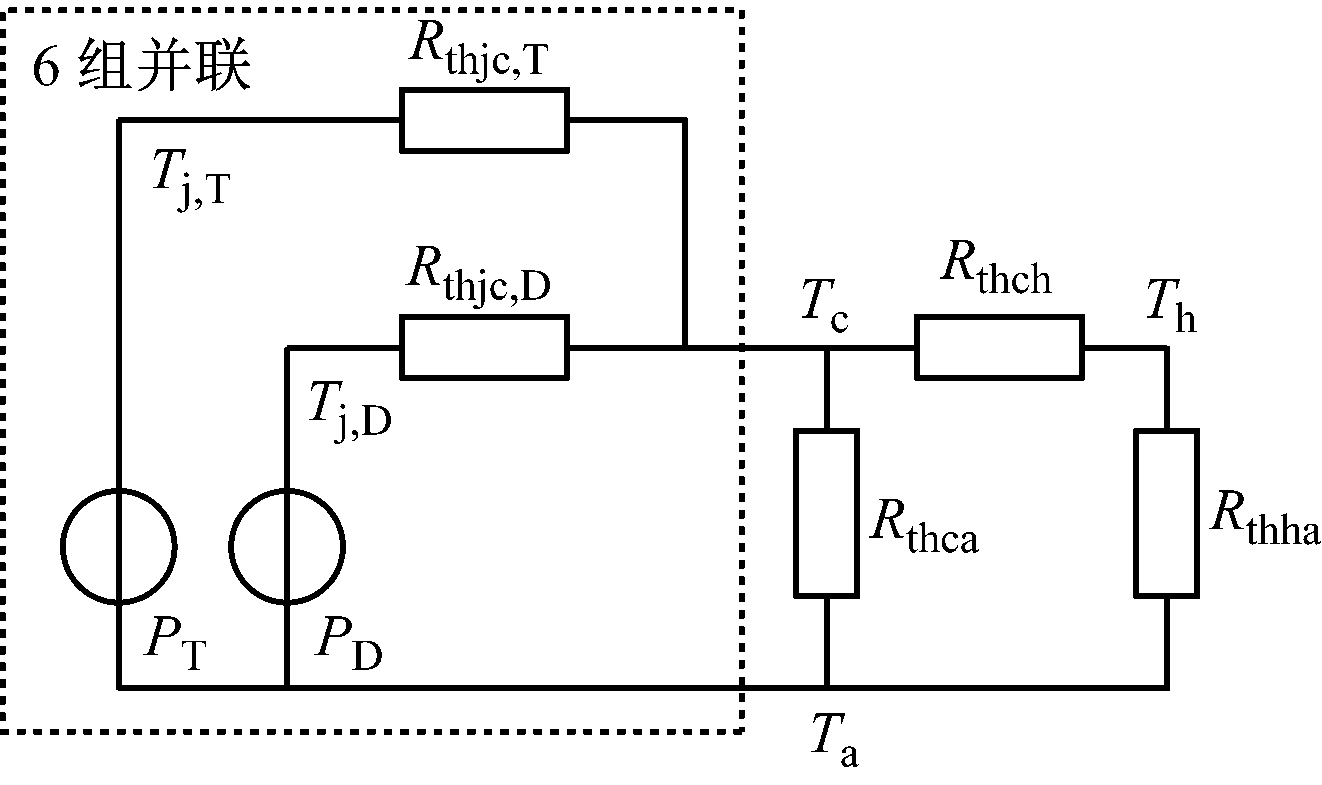
图3 稳态热阻等效电路
利用稳态热阻等效电路可以计算驱动系统各点的温度,在热阻参数一定的条件下,驱动系统的温度仅与开关损耗正相关。
3.1 开关频率动态调整
参考文献:[9-12]指出,随着IGBT功率器件电压、功率等级的提高,其对应开关损耗也加大。动态调整IGBT开关频率可降低其开关损耗,从而实现主动热均衡控制。根据IGBT数据手册,125 ℃时IGBT开关损耗为
Esw,T=Eon,T+Eoff,T=(Asw,TI2+Bsw,TI+
(9)
式中:Esw,T,Eon,T,Eoff,T分别为测试条件下单个IGBT开关1次、开通1次和关断1次的能量损耗;Asw,T,Bsw,T,Csw,T分别为测试条件下开关损耗随电流变化的二次拟合曲线系数;U,I分别为IGBT实际电压、电流;Ubase,Ibase分别为IGBT参考电压、电流;Ksw,U,Ksw,I分别为电压、电流幅值对IGBT 开关损耗的影响系数。
此时,在1个开关周期内IGBT平均开关损耗为
(10)
式中fsw为IGBT开关频率。
图4为PWM调制下IGBT开关损耗仿真结果,其中IGBT导通功率损耗Pon,T、关断功率损耗Poff,T在全范围内呈周期性变化,峰值分别为30,50 W。

(a) PWM调制波形
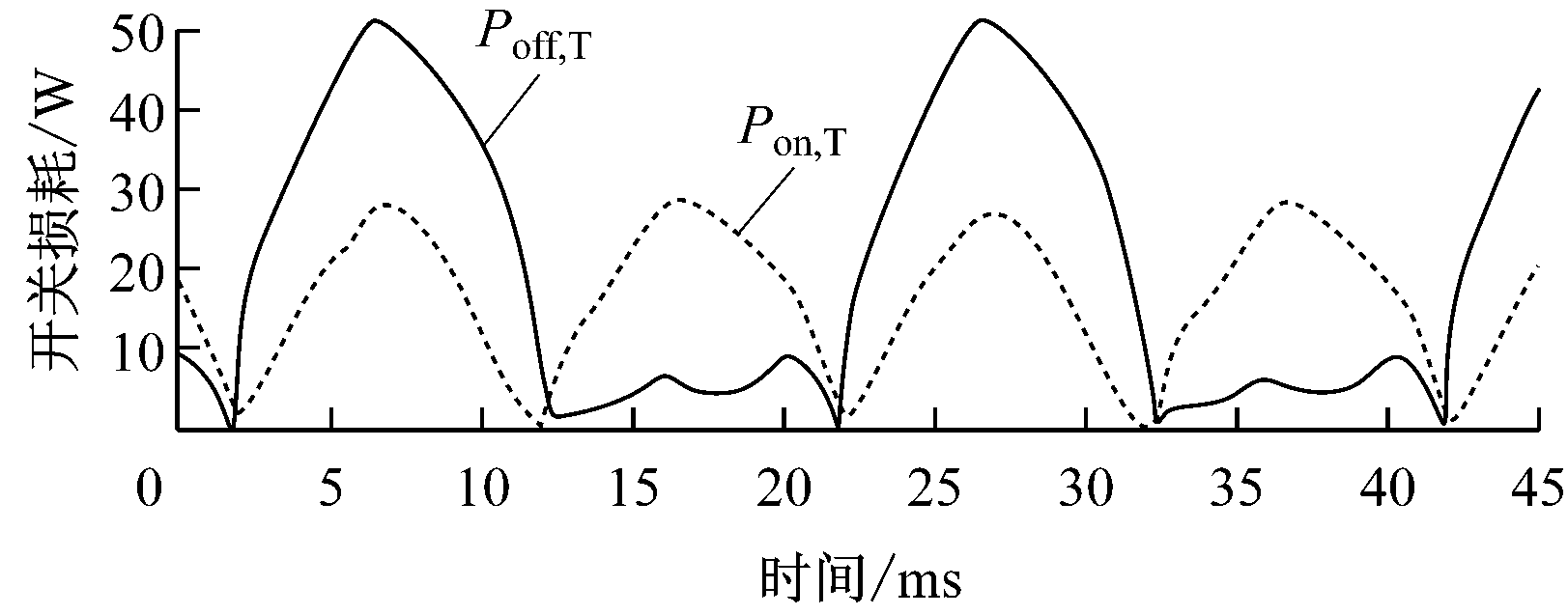
(b) IGBT开关损耗
图4 PWM调制下IGBT开关损耗仿真结果
从式(10)可看出,调整IBGT开关频率fsw可实现IGBT开关损耗的有效修正。根据IGBT数据手册中标称电流与温度的关系以及工作温度范围,确定合适的驱动系统温度给定值,将红外热成像仪的测量温度作为反馈值,二者差值送至双线性曲线模块,利用该模块的双线性特性产生IGBT开关频率的待调整量,实现对IGBT开关频率的动态调整。
3.2 定子电流幅值自适应修正
内埋式永磁同步电动机没有转子铜损,所以转子内损耗很小。当电动机拖动负载运行时,从电源输入的电功率Pin为
(11)
式中:Pout为电动机转轴实际输出功率;PCu,PFe分别为电动机定子铜损和铁损;Pmech为电动机轴承摩擦的机械损耗。
电动机轴承摩擦的机械损耗Pmech与轴承的加工精度和润滑程度有关;电动机定子铁损PFe与电源电压成正比,电源电压不变,定子铁损也几乎不变;电动机铜损PCu与定子电流的平方成正比,因此当电动机拖动负载运行时,降低定子电流能够有效减少电动机损耗。
本文在MTPA方法基础上,基于温度反馈值,自适应修正定子电流幅值,优化电动机d,q轴定子电流矢量计算方法,如图5所示。其中Tj,lim为驱动系统温度设定值;Tigbt,Tfwdi分别为驱动系统中IGBT和二极管的温度测定值;Ploss,igbt,Ploss,fwdi分别为驱动系统中IGBT和二极管的开关损耗实时计算值;Ci,Cf分别为IGBT和二极管导热系数;τel,j为环境换热系数;|I|max为定子电流饱和限幅值。

图5 基于温度反馈的电动机定子电流矢量计算方法
将驱动系统温度反馈值Tigbt,Tfwdi与温度设定值做差,差值与经验热阻Ci/τel,j,Cf/τel,j相乘得到开关损耗的待修正值,将求出的定子电流幅值转换为有效值,与当前开关频率同时带入式(9)和式(10),计算修正前的开关损耗,与待修正值叠加求出修正后的开关损耗。然后通过式(9)和式(10)的逆运算及饱和限幅,得到修正后的定子电流幅值|I|lim。最后,基于传统MTPA方法,求出最优电流角度和d,q轴电流来驱动电动机。
4.1 实验平台及方案
采用如图6所示的15 kW永磁同步电动机调速系统实验平台来验证矿山电力牵引系统ATBM的可行性和有效性。该实验平台以TMS320F2812型DSP为核心,主要完成MTPA核心算法运算、通信等功能。协处理器采用Xilinx型FPGA和CPLD,其中FPGA主要完成AD采样、数据存储等功能,CPLD主要完成PWM状态检测、死区补偿、脉冲封锁等功能。
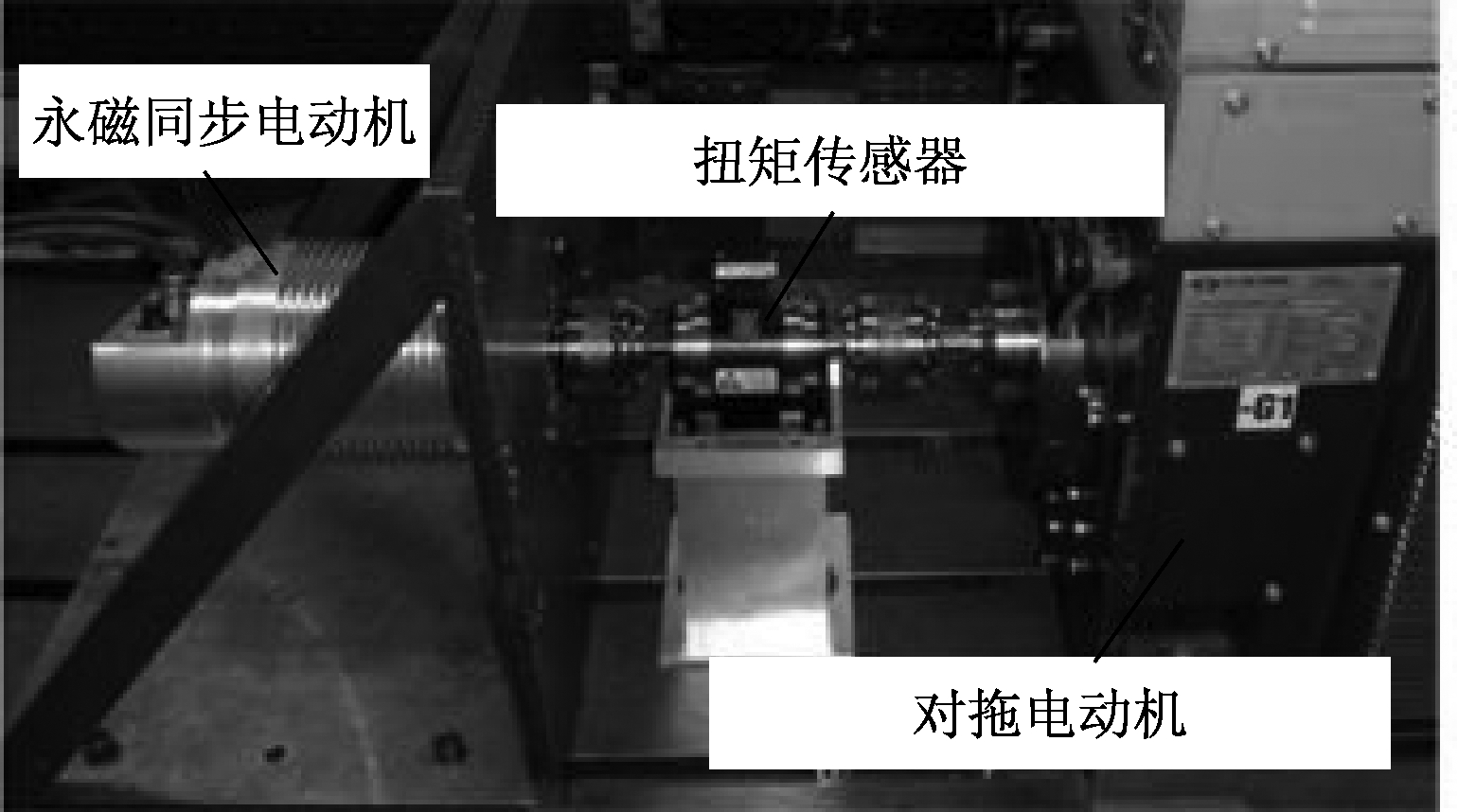

图6 15 kW永磁同步电动机调速系统实验平台
4.2 实验结果及分析
在负载转矩为50 N·m的条件下,稳态时电动机定子电流波形如图7所示。可看出电流波形对称且均匀。
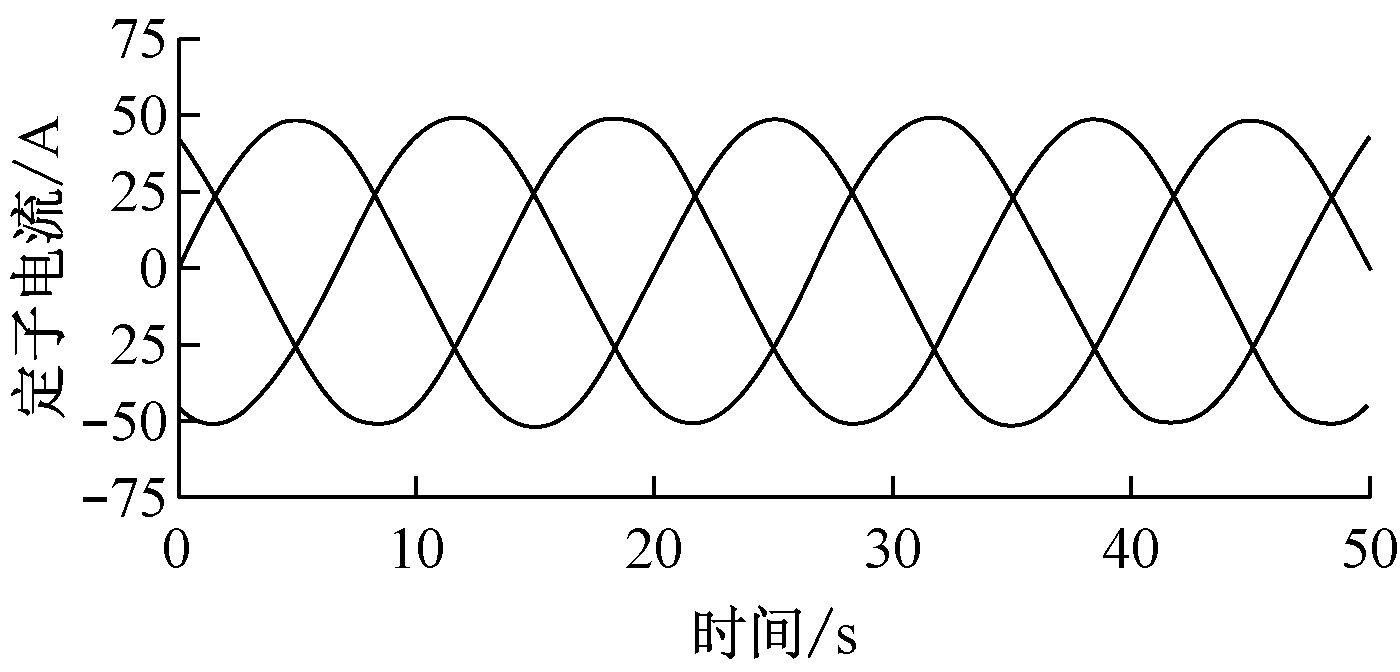
图7 矿山电力牵引系统稳态电流波形
采用ATBM时矿山电力牵引系统动态响应波形如图8所示,其中永磁同步电动机稳态运行速度为1 000 r/min,之后将负载转矩由5 N·m阶跃至25 N·m,此时电磁转矩快速响应负载转矩变化(响应时间小于2 ms),可以限制电动机负载突变时的转速跌落。同时,电动机定子电流逐渐减小,直至完成对最优电流角度的精确跟踪。整个过程持续约10 ms。

图8 矿山电力牵引系统动态转矩、电流波形
设置电动机负载转矩恒为71 N·m,转速为500~1 500 r/min,转速变步长为500 r/min。采用ATBM时,矿山电力牵引系统的功率损耗如图9所示。可见在500,1 000,1 500 r/min转速条件下,系统均稳定运行于全局效率最大处,功率损耗分别为818,926,1 029 W,对应的效率分别为82.1%,88.9%,91.0%。在相同的实验条件下采用MTPA方法时,系统最终稳定运行时功率损耗分别为836,1 001,1 203 W,均高于采用ATBM时的功率损耗。ATBM因引入了电动机驱动系统损耗模型,进一步提高了系统全局效率,且电动机转速越大,与采用MTPA方法时的系统全局效率差异越明显。

图9 采用ATBM时矿山电力牵引系统功率损耗
采用MTPA和ATBM 2种方法时,矿山电力牵引系统的温度场对比如图10所示。采用MTPA方法时系统的热点峰值为55.7 ℃,采用ATBM时热点峰值为44.9 ℃,温度差为10.8 ℃。可见ATBM通过主动调节IGBT开关频率、限制电动机定子电流幅值等方式有效降低了矿山电力牵引系统的热点峰值,从而降低了对散热装置的要求,保障了系统的可靠运行。

图10 MTPA,ATBM 2种方法的温度场对比
(1) ATBM可保证矿山电力牵引系统的高稳态精度,满足复杂矿山工况的高动态响应需求。
(2) ATBM通过主动调节IGBT开关频率、限制电动机定子电流幅值等方式,有效降低了矿山电力牵引系统的热点峰值。
参考文献:
[1] 于明湖,张玉秋,乔正忠,等.永磁同步电机损耗分离方法研究[J].微特电机,2015,43(8):14-18.
[2] 李耀华,刘晶郁.永磁同步电机矢量控制系统MTPA控制实现[J].电气传动自动化,2011,33(4):9-11.
[3] 郎宝华,毕雪芹,刘卫国.MTPA控制的直接转矩控制系统研究[J].西安工业大学学报,2010,30(1):75-78.
[4] 廖勇,伍泽东,刘刃.车用永磁同步电机的改进MTPA控制策略研究[J].电机与控制学报,2012,16(1):12-17.
[5] LASCU C,BOLDEA I,BLAABJERG F.Very-low-speed variable-structure control of sensorless induction machine drives without signal injecton[J].IEEE Transaction on Industry Applications,2005,41(2):591-598.
[6] 史光辉,于佳,张亮.永磁同步电动机最大转矩电流比控制[J].电机技术,2009(5):28-31.
[7] GENG L,CHEN Z M,KRUEMMER R,et al.A precise model for simulation of temperature distribution in power modules[J].Chniese Journal of Semiconductors,2001,22(5):548-553.
[8] 胡建辉,李锦庚,邹继斌,等.变频器中的IGBT模块损耗计算及散热系统设计[J].电工技术学报,2009,24(3):159-163.
[9] JUNG S Y,JINSEOK H,KWANGHEE N A M.Current minimizing torque control of the PMSM using ferrari's method[J].IEEE Transactions on Power Electronics,2013,28(12):5603-5617.
[10] DARYABEIGI E,ABOOTORABI Z H,ARAB M G R,et al.Online MTPA control approach for synchronous reluctance motor drives based on emotional controller[J].IEEE Transactions on Power Electronics,2015,30(4):2157-2166.
[11] 焦宁飞,刘卫国,张华,等.一种变励磁无刷同步电机最大转矩电流比控制方法[J].微特电机,2013,41(1):4-6.
[12] 丁树业,刘书齐,毕刘新,等.矢量控制下永磁同步电机的损耗分析[J].西安交通大学学报,2013,47(12):95-101.
YANG Xiao1, LI Yanjiang1, GUO Dan2
(1.Beijing General Research Institute of Mining and Metallurgy, Beijing 100160, China; 2.State Key Laboratory of Synthetical Automation for Process Industries, Northeastern University, Shenyang 110004, China)
Abstract:An active thermal balance method of mine electric traction system was proposed to solve the system heating, which completed on-line self-adjustment of motor stator current amplitude and switching frequency of driving system by returning temperature signal of the electric traction system in real time. An optimizedd,q axis current vector calculation method based on the temperature signal was proposed, which could make the electric traction system work at working characteristic curve with the maximum overall efficiency. The method has been verified by using 15 kW permanent magnet synchronous motor speed-adjusting system. The experimental result shows the method can ensure dynamic and stable performance of the mine electric traction system and decrease hotspot safety.
Key words:mine power traction system; active thermal balance control; permanent magnet synchronous; driving system; efficiency optimization
文章编号:1671-251X(2016)05-0051-05
DOI:10.13272/j.issn.1671-251x.2016.05.012
收稿日期:2015-11-06;
修回日期:2016-03-21;责任编辑:李明。
基金项目:国家自然科学基金资助项目(51377020)。
作者简介:杨枭(1989—),男,辽宁沈阳人,工程师,硕士,主要从事有色金属冶炼厂供配电及电气自动化工程设计工作,E-mail:bjky_yx@126.com。
中图分类号:TD631
文献标志码:A 网络出版时间:2016-04-29 11:27
杨枭,厉彦江,郭单.矿山电力牵引系统主动热均衡控制方法[J].工矿自动化,2016,42(5):51-55.