图1 系统通信结构
经验交流
张虓, 罗维东
(北京科技大学 机械工程学院, 北京 100083)
摘要:针对电传动系统运行过程中会产生大量实时数据的问题,对电传动地下铲运机远程数据传输系统进行了研究。该系统采用分布式CAN总线实现工业现场数据传输和铲运机运行数据采集;以无线通信网络为传输通道,利用TCP/IP异步传输原理,通过车载客户端子系统和服务器子系统实现了车载数据的远程传输。
关键词:煤炭开采; 电传动; 铲运机; 远程数据传输; 分布式CAN总线; TCP/IP异步通信
为了解决危险采场的出矿问题,降低采矿作业危险,遥控甚至无人采矿设备已经成为国内外同行研究的重点[1-2]。随着电传动技术的发展,更多的地下采矿设备采用电传动系统。电传动系统在运行过程中将产生大量的实时数据,这些数据可用于实时控制、设备优化和维护等。对这些数据进行采集、处理和异地存储,成为采矿设备自动控制、远程控制研究必不可少的技术手段。 本文以电传动地下铲运机为研究对象,设计了其远程数据传输系统。
本文讨论的电传动地下铲运机为四轮驱动,柴油发动机输出的机械能通过交流发电机转换为电能,经过整流器和逆变器输入4个轮边电动机,轮边电动机将电能转换为动能,为车辆提供动力。由于铲运机上采用的电子控制单元数量较多,电传动系统运行时必须实现各个电控单元间的大量实时数据交换。CAN总线具有结构简单、数据可靠性高、连接便捷、节点设置不受限制、错误检测能力良好等优点,在车辆控制系统上已经得到了普遍应用[3] ,因此采用CAN总线实现工业现场数据传输。
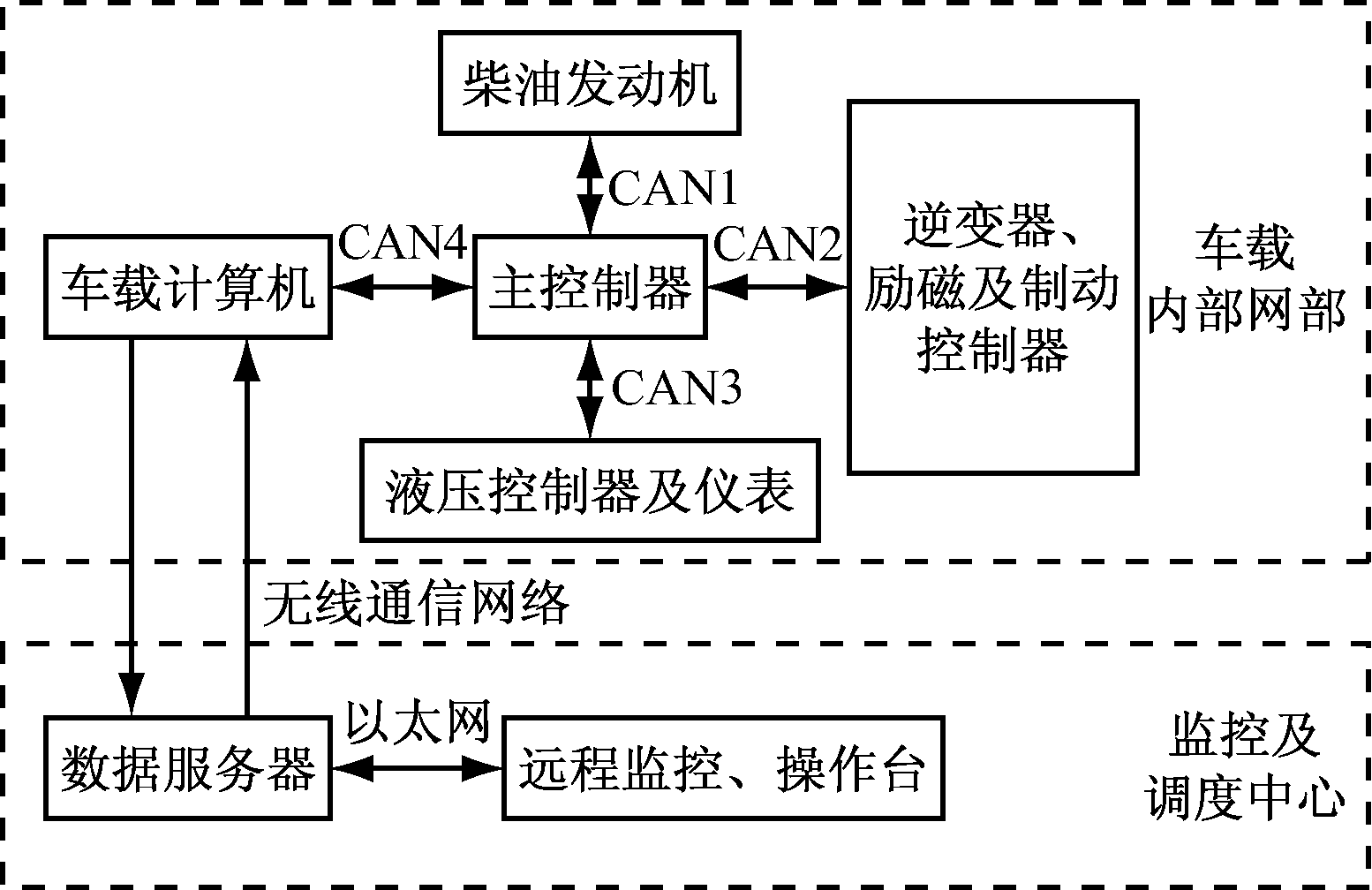
为了满足日常生产的通信需求,地下矿山的巷道中通常铺设有无线通信网络,与调度中心的网络相连。因此,电传动地下铲运机远程数据传输系统以该无线通信网络为传输通道,以TCP/IP协议作为通信协议,利用Socket网络编程技术,实现电传动地下铲运机运行数据的远程传输和实时监控。系统通信结构如图1所示。
图1 系统通信结构
根据作用的对象不同,电传动地下铲运机远程数据传输系统分成了2个子系统:车载客户端子系统和远程服务器子系统。车载客户端子系统主要负责发送实时运行数据和接收操作台指令,并将控制指令发送给主控制器;远程服务器子系统负责接收运行数据,解析处理数据和发送操作台指令。由于系统需要监控的数据量较大,为了保证数据通信的可靠性和实时性,系统采用异步TCP通信方式[5-6]。
由于电传动控制系统复杂性较高,控制对象在结构上相对分散,所以,按照功能将整个控制系统分成若干子系统,形成分布式控制结构[4]。分布式CAN总线结构如图2所示。
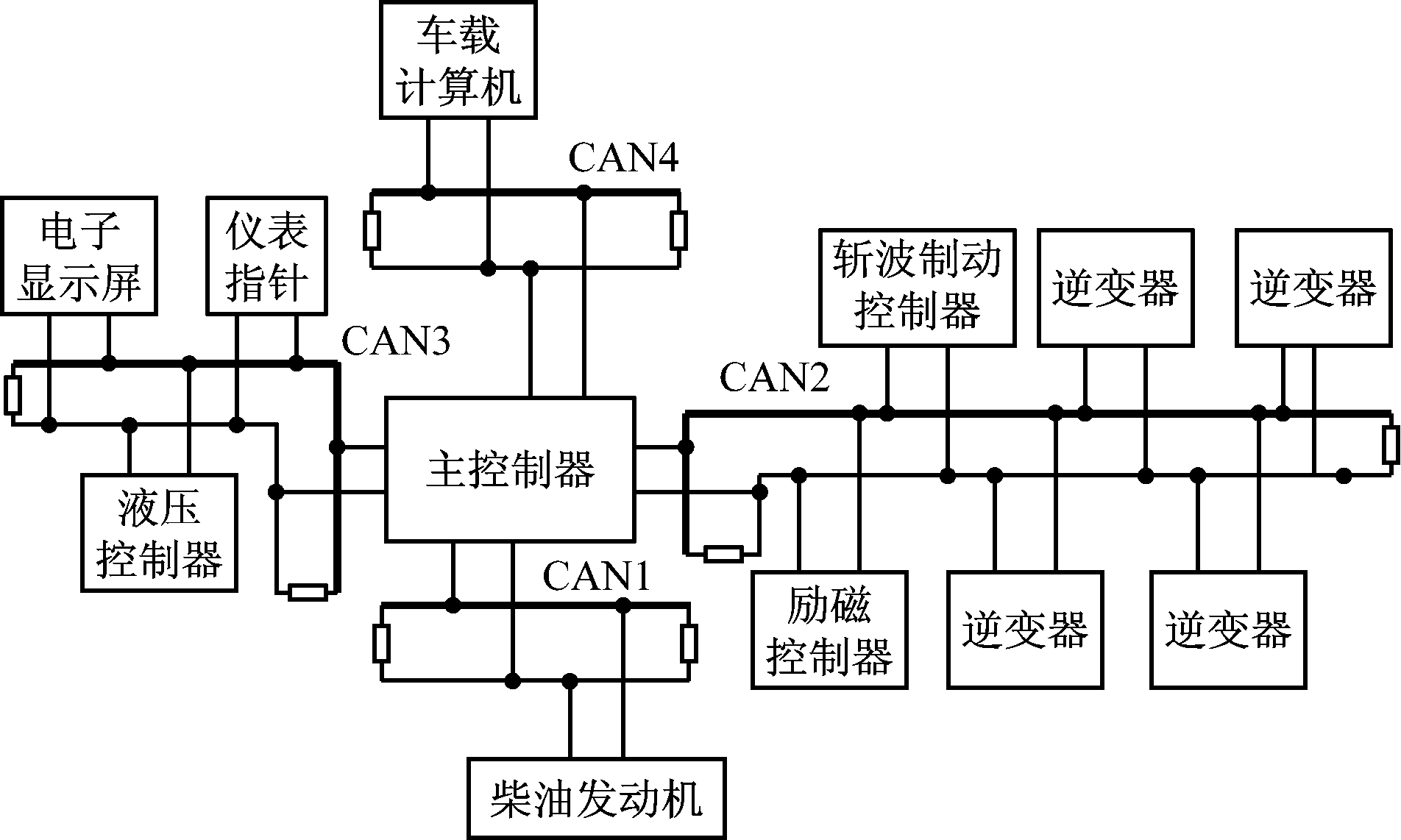
图2 分布式CAN总线结构
CAN总线网络以电传动地下铲运机的主控制器为核心,分为4路CAN网络拓扑,采用主从式通信模式。CAN1为柴油发动机控制网络,主控制器直接与柴油发动机的电控单元(Electronic Control Unit, ECU)进行通信,遵循SAE J1939协议;CAN2为车辆动力控制网络,主控制器对包括励磁控制器、斩波制动控制器和轮边牵引电动机逆变器进行控制;CAN3为辅助控制网络,主控制器对铲运机铲装机构的液压控制器、显示屏、仪表等进行控制;CAN4为数据传输网络,主控制器将其他网络采集的实时数据传输至车载计算机。为了提高每个网络数据传输的抗干扰性和可靠性,在各网络的终端加入120 Ω的终端电阻。
根据工程经验,CAN总线网络的通信波特率采用250 kbit/s可以满足通信需求。为了保证CAN总线通信畅通,总线占用率最好保持在33%~66%。根据位填充技术,数据帧m的最坏总线占用时间Cm为
(1)
式中:dm为数据域字节数,该通信协议下最大为8;τbit为位时间,在250 kbit/s波特率下为0.004 ms。
由于CAN2运行时所产生的数据量最大,为了统一网络协议标准,其他网络的通信周期以CAN2为标准,则CAN2中全部数据帧的最坏总线占用时间之和约为10.5 ms。因此,可选取的通信周期为15~30 ms。根据主控制器工作周期,本文选取25 ms为CAN总线通信周期。
由于各个控制器的启动时间不同,尤其是车载计算机的启动时间晚于其他控制器,为了保证车载运行数据的完备性,设计了启动后的握手检验系统。主控制器启动后不断向其他控制器发送握手信号,其他控制器收到握手信号后向总线发送握手反馈信号,主控制器收到全部握手反馈信号后,跳出握手检验系统,开始执行行车控制。
3.1 车载客户端子系统
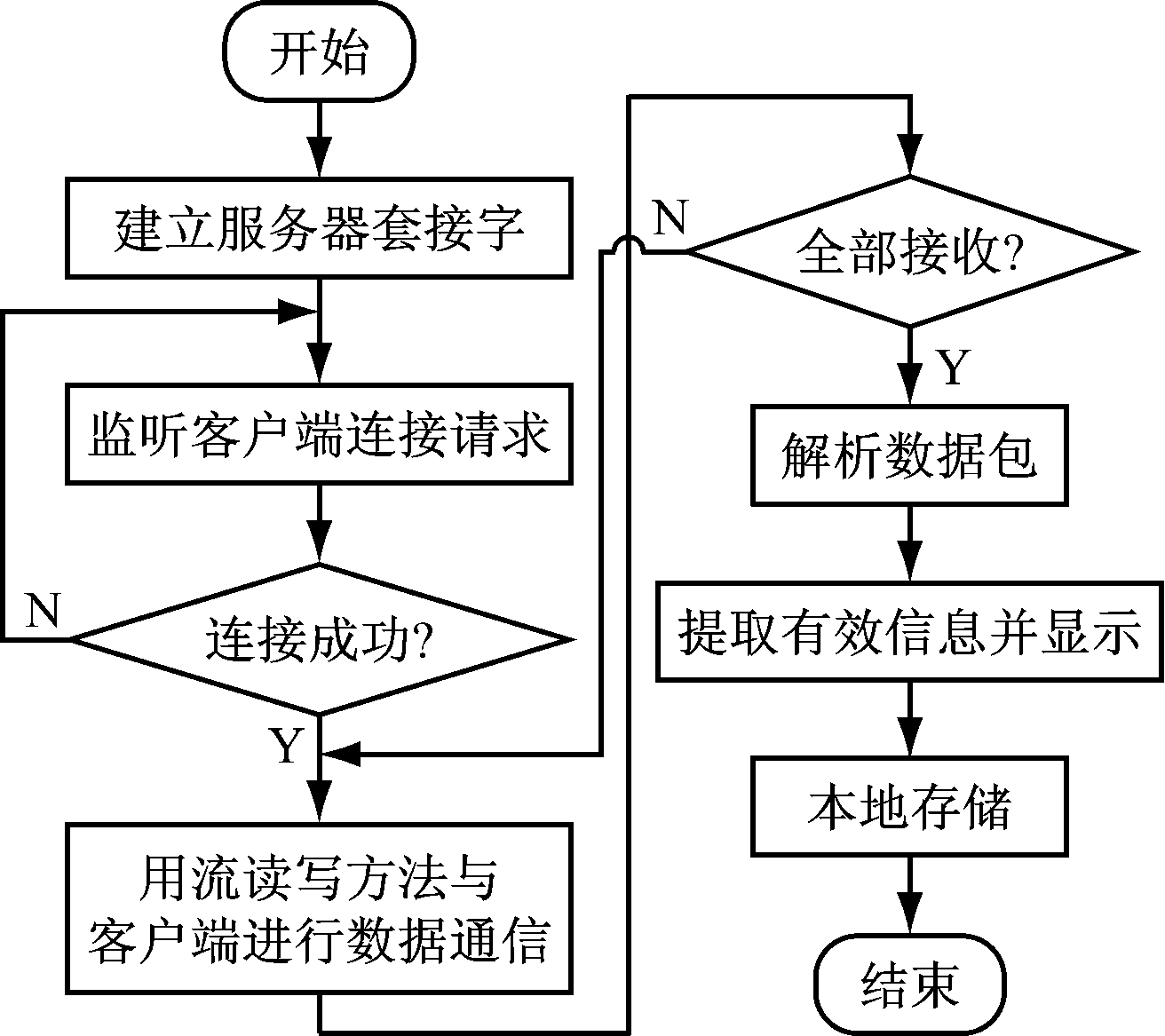
车载客户端子系统将CAN总线传来的实时数据简单处理后进行本地存储,通过无线通信网络与调度中心数据服务器进行远程数据交互;同时解析操作台的控制指令,通过CAN总线将控制指令发送到主控制器。车载客户端子系统软件流程如图3所示。
3.2 远程服务器子系统
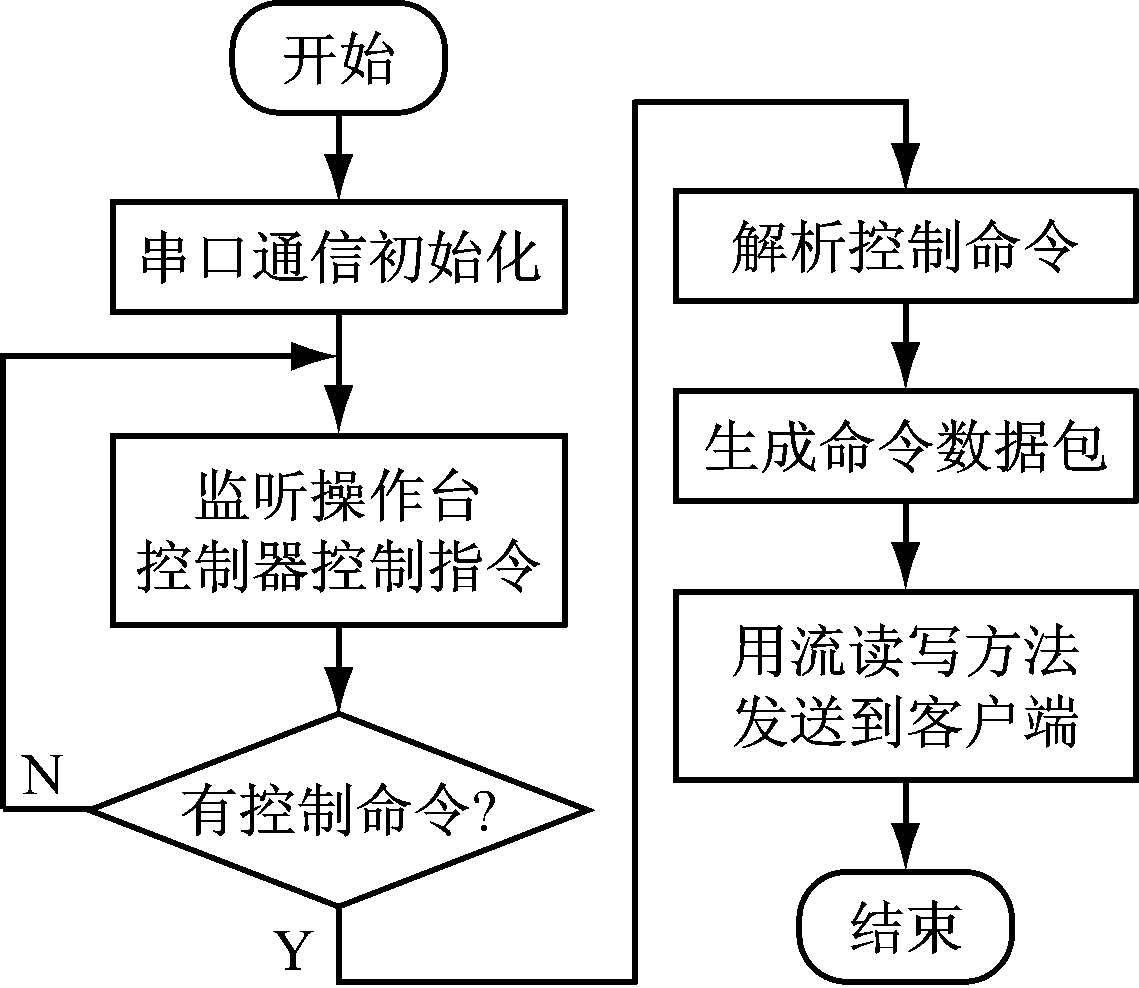
远程服务器子系统主要由2个部分构成,第1部分的作用是接收车载客户端子系统发送的数据并进行解析,将驾驶员所要了解的车辆信息(如车速、发动机转速、档位状态等)显示出来,并将解析后的数据存入调度中心的数据库;第2部分的作用是响应操作台控制器采集到的控制指令(手柄、踏板等),
图3 车载客户端子系统软件流程
并向车载客户端子系统发送控制指令。远程服务器子系统软件流程如图4所示。
(a) 第1部分
(b) 第2部分
图4 远程服务器子系统软件流程
3.3 数据通信校验
为防止网络不稳定导致数据错误,在客户端与服务器的通信中加入校验信息。当车载实时数据被解析并封装成数据包准备发送时,待发送数据包就是一个包含有用数据的数组。对数组中的值进行循环冗余校验(CRC),得出CRC值,再将CRC值附到数据包后进行发送。
服务器收到数据后提取出CRC值,并对数据包中的内容进行校验,再将得出的值与收到的CRC值进行比对。若两值相等,则说明数据可信,该包数据会被系统解析,并存储及显示;若两值不相等,则说明数据传输有误,直接舍弃该包数据并等待下一包数据。客户端数据校验原理类似。客户端和服务器数据包结构如图5所示。

(a) 客户端
(b) 服务器
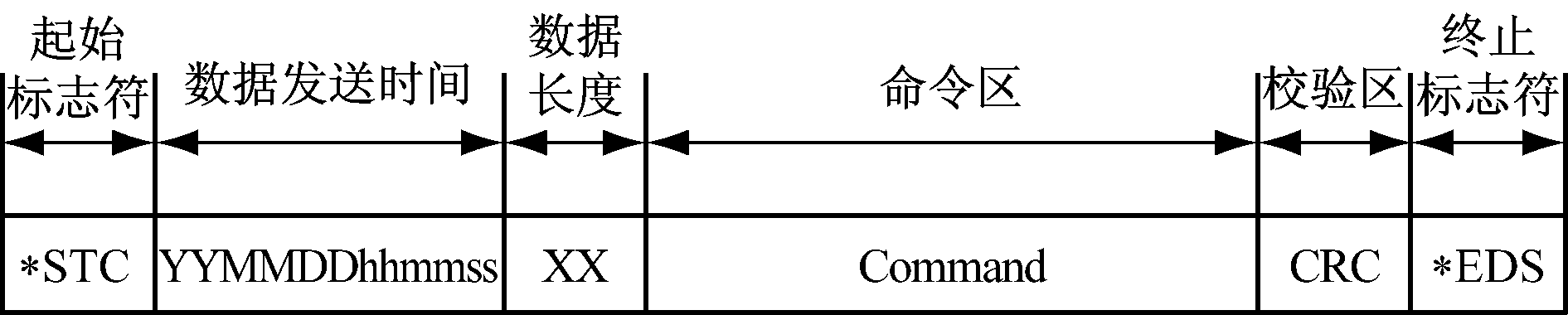
图5 数据包结构
客户端和服务器发送的数据包分别以相应的起始标志符开始,随后依次为数据发送时间、数据长度、数据区和校验区,最后以终止标志符结束。各区域间用“ ; ”分隔,数据区各数据之间用“ , ”分隔。
电传动地下铲运机远程数据传输系统采用分布式CAN总线结构,利用TCP/IP异步传输原理实现了实时数据远程传输功能。分布式CAN总线结构具有很高的可靠性,可以有效采集实车运行数据,利用TCP/IP异步传输原理进行数据远程通信具有可行性。
参考文献:
[1] 战凯,顾洪枢,周俊武,等.地下遥控铲运机遥控技术和精确定位技术研究[J].有色金属,2009,61(1):107-112.
[2] 高梦熊.国内外地下金属矿山采矿车辆的现在与未来[C]//中国矿业科技大会论文集,苏州,2010:43-64.
[3] 杨超,刘立,陈树新,等.基于CAN总线的地下铲运机遥控系统的研究[J].矿山机械,2011,39(3):30-32.
[4] 钟恒.多轮电传动车辆控制方法的研究[D].北京:北京科技大学,2012.
[5] 徐小东.基于socket技术的数据交换平台的设计与实现[D].上海:上海交通大学,2006.
[6] 张允刚,刘常春,刘伟,等.基于Socket和多线程的远程监控系统[J].控制工程,2006,13(2):175-177.
ZHANG Xiao, LUO Weidong
(School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China)
Abstract:In view of problem that a large amount of real-time data will be generated during operation of electric drive system, remote data transmission system of underground electric drive scraper was studied. The system uses distributed CAN bus to realize industrial field data transmission and operation data collection of scraper, takes wireless communication network as transmission channel, adopts principle of TCP/IP asynchronous transmission, and realizes onboard data remote transmission by onboard client subsystem and server subsystem.
Key words:coal mining; electric drive; scraper; remote data transmission; distributed CAN bus; TCP/IP asynchronous communication
文章编号:1671-251X(2016)11-0064-03
DOI:10.13272/j.issn.1671-251x.2016.11.015
张虓, 罗维东.电传动地下铲运机远程数据传输系统研究[J].工矿自动化,2016,42(11):64-66.
收稿日期:2016-04-26;
修回日期:2016-09-20;责任编辑:胡娴。
基金项目:国家高技术研究发展计划(863计划)项目(2011AA060408);国家科技支撑计划项目(2013BAB02B07)。
作者简介:张虓(1986-),男,河北石家庄人,博士研究生,主要研究方向为电传动矿用车辆行驶控制策略及运行数据分析等,E-mail:zhangxiao_miracle@126.com。
中图分类号:TD655
文献标志码:A
网络出版:时间:2016-10-28 16:29
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20161028.1629.015.html